VGGNet介绍
VGGNet介绍
1 简要概括
VGGNet由牛津大学计算机视觉组合和Google DeepMind公司研究员一起研发的深度卷积神经网络。它探索了卷积神经网络的深度和其性能之间的关系,通过反复的堆叠3*3的小型卷积核和2*2的最大池化层,成功的构建了16~19层深的卷积神经网络。VGGNet获得了ILSVRC 2014年比赛的亚军和定位项目的冠军,在top5上的错误率为7.5%。目前为止,VGGNet依然被用来提取图像的特征。
2 创新点
VGGNet全部使用3*3的卷积核和2*2的池化核,通过不断加深网络结构来提升性能。网络层数的增长并不会带来参数量上的爆炸,因为参数量主要集中在最后三个全连接层中。同时,两个3*3卷积层的串联相当于1个5*5的卷积层,3个3*3的卷积层串联相当于1个7*7的卷积层,即3个3*3卷积层的感受野大小相当于1个7*7的卷积层。但是3个3*3的卷积层参数量只有7*7的一半左右,同时前者可以有3个非线性操作,而后者只有1个非线性操作,这样使得前者对于特征的学习能力更强。

使用1*1的卷积层来增加线性变换,输出的通道数量上并没有发生改变。这里提一下1*1卷积层的其他用法,1*1的卷积层常被用来提炼特征,即多通道的特征组合在一起,凝练成较大通道或者较小通道的输出,而每张图片的大小不变。有时1*1的卷积神经网络还可以用来替代全连接层。
其他小技巧。VGGNet在训练的时候先训级别A的简单网络,再复用A网络的权重来初始化后面的几个复杂模型,这样收敛速度更快。VGGNet作者总结出LRN层作用不大,越深的网络效果越好,1*1的卷积也是很有效的,但是没有3*3的卷积效果好,因为3*3的网络可以学习到更大的空间特征。
3 网络结构
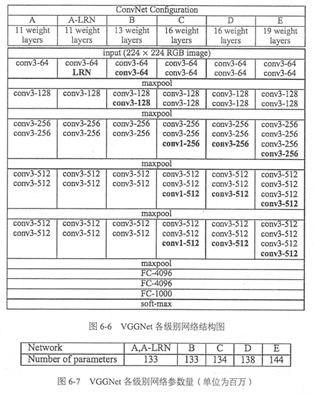
VGGNet的网络结构如下图所示。VGGNet包含很多级别的网络,深度从11层到19层不等,比较常用的是VGGNet-16和VGGNet-19。VGGNet把网络分成了5段,每段都把多个3*3的卷积网络串联在一起,每段卷积后面接一个最大池化层,最后面是3个全连接层和一个softmax层。
4 代码实现
代码实现参考自tensorflow的开源实现
#%%
# Copyright 2016 The TensorFlow Authors. All Rights Reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
# ==============================================================================
from datetime import datetime
import math
import time
import tensorflow as tf
def conv_op(input_op, name, kh, kw, n_out, dh, dw, p):
n_in = input_op.get_shape()[-1].value
with tf.name_scope(name) as scope:
kernel = tf.get_variable(scope+"w",
shape=[kh, kw, n_in, n_out],
dtype=tf.float32,
initializer=tf.contrib.layers.xavier_initializer_conv2d())
conv = tf.nn.conv2d(input_op, kernel, (1, dh, dw, 1), padding='SAME')
bias_init_val = tf.constant(0.0, shape=[n_out], dtype=tf.float32)
biases = tf.Variable(bias_init_val, trainable=True, name='b')
z = tf.nn.bias_add(conv, biases)
activation = tf.nn.relu(z, name=scope)
p += [kernel, biases]
return activation
def fc_op(input_op, name, n_out, p):
n_in = input_op.get_shape()[-1].value
with tf.name_scope(name) as scope:
kernel = tf.get_variable(scope+"w",
shape=[n_in, n_out],
dtype=tf.float32,
initializer=tf.contrib.layers.xavier_initializer())
biases = tf.Variable(tf.constant(0.1, shape=[n_out], dtype=tf.float32), name='b')
activation = tf.nn.relu_layer(input_op, kernel, biases, name=scope)
p += [kernel, biases]
return activation
def mpool_op(input_op, name, kh, kw, dh, dw):
return tf.nn.max_pool(input_op,
ksize=[1, kh, kw, 1],
strides=[1, dh, dw, 1],
padding='SAME',
name=name)
def inference_op(input_op, keep_prob):
p = []
# assume input_op shape is 224x224x3
# block 1 -- outputs 112x112x64
conv1_1 = conv_op(input_op, name="conv1_1", kh=3, kw=3, n_out=64, dh=1, dw=1, p=p)
conv1_2 = conv_op(conv1_1, name="conv1_2", kh=3, kw=3, n_out=64, dh=1, dw=1, p=p)
pool1 = mpool_op(conv1_2, name="pool1", kh=2, kw=2, dw=2, dh=2)
# block 2 -- outputs 56x56x128
conv2_1 = conv_op(pool1, name="conv2_1", kh=3, kw=3, n_out=128, dh=1, dw=1, p=p)
conv2_2 = conv_op(conv2_1, name="conv2_2", kh=3, kw=3, n_out=128, dh=1, dw=1, p=p)
pool2 = mpool_op(conv2_2, name="pool2", kh=2, kw=2, dh=2, dw=2)
# # block 3 -- outputs 28x28x256
conv3_1 = conv_op(pool2, name="conv3_1", kh=3, kw=3, n_out=256, dh=1, dw=1, p=p)
conv3_2 = conv_op(conv3_1, name="conv3_2", kh=3, kw=3, n_out=256, dh=1, dw=1, p=p)
conv3_3 = conv_op(conv3_2, name="conv3_3", kh=3, kw=3, n_out=256, dh=1, dw=1, p=p)
pool3 = mpool_op(conv3_3, name="pool3", kh=2, kw=2, dh=2, dw=2)
# block 4 -- outputs 14x14x512
conv4_1 = conv_op(pool3, name="conv4_1", kh=3, kw=3, n_out=512, dh=1, dw=1, p=p)
conv4_2 = conv_op(conv4_1, name="conv4_2", kh=3, kw=3, n_out=512, dh=1, dw=1, p=p)
conv4_3 = conv_op(conv4_2, name="conv4_3", kh=3, kw=3, n_out=512, dh=1, dw=1, p=p)
pool4 = mpool_op(conv4_3, name="pool4", kh=2, kw=2, dh=2, dw=2)
# block 5 -- outputs 7x7x512
conv5_1 = conv_op(pool4, name="conv5_1", kh=3, kw=3, n_out=512, dh=1, dw=1, p=p)
conv5_2 = conv_op(conv5_1, name="conv5_2", kh=3, kw=3, n_out=512, dh=1, dw=1, p=p)
conv5_3 = conv_op(conv5_2, name="conv5_3", kh=3, kw=3, n_out=512, dh=1, dw=1, p=p)
pool5 = mpool_op(conv5_3, name="pool5", kh=2, kw=2, dw=2, dh=2)
# flatten
shp = pool5.get_shape()
flattened_shape = shp[1].value * shp[2].value * shp[3].value
resh1 = tf.reshape(pool5, [-1, flattened_shape], name="resh1")
# fully connected
fc6 = fc_op(resh1, name="fc6", n_out=4096, p=p)
fc6_drop = tf.nn.dropout(fc6, keep_prob, name="fc6_drop")
fc7 = fc_op(fc6_drop, name="fc7", n_out=4096, p=p)
fc7_drop = tf.nn.dropout(fc7, keep_prob, name="fc7_drop")
fc8 = fc_op(fc7_drop, name="fc8", n_out=1000, p=p)
softmax = tf.nn.softmax(fc8)
predictions = tf.argmax(softmax, 1)
return predictions, softmax, fc8, p
def time_tensorflow_run(session, target, feed, info_string):
num_steps_burn_in = 10
total_duration = 0.0
total_duration_squared = 0.0
for i in range(num_batches + num_steps_burn_in):
start_time = time.time()
_ = session.run(target, feed_dict=feed)
duration = time.time() - start_time
if i >= num_steps_burn_in:
if not i % 10:
print ('%s: step %d, duration = %.3f' %
(datetime.now(), i - num_steps_burn_in, duration))
total_duration += duration
total_duration_squared += duration * duration
mn = total_duration / num_batches
vr = total_duration_squared / num_batches - mn * mn
sd = math.sqrt(vr)
print ('%s: %s across %d steps, %.3f +/- %.3f sec / batch' %
(datetime.now(), info_string, num_batches, mn, sd))
def run_benchmark():
with tf.Graph().as_default():
image_size = 224
images = tf.Variable(tf.random_normal([batch_size,
image_size,
image_size, 3],
dtype=tf.float32,
stddev=1e-1))
keep_prob = tf.placeholder(tf.float32)
predictions, softmax, fc8, p = inference_op(images, keep_prob)
init = tf.global_variables_initializer()
config = tf.ConfigProto()
config.gpu_options.allocator_type = 'BFC'
sess = tf.Session(config=config)
sess.run(init)
time_tensorflow_run(sess, predictions, {keep_prob:1.0}, "Forward")
objective = tf.nn.l2_loss(fc8)
grad = tf.gradients(objective, p)
time_tensorflow_run(sess, grad, {keep_prob:0.5}, "Forward-backward")
batch_size=32
num_batches=100
run_benchmark()
5 参考文献
[1]黄文坚,唐源.TensorFlow实战[M].北京:电子工业出版社,2017.
[2] https://arxiv.org/abs/1409.1556v6
[3]https://github.com/machrisaa/tensorflow-vgg