电机FOC算法的解释
一、开始说FOC之前,我们先来弄清楚电机是怎么动起来的,电机的q轴、d轴是什么,FOC存在的意义是什么。
这里有一篇知乎的文章,作者w浩森说的太好了,推荐大家去看一看。我这里总结几条本文章后面需要用到的观点:
1、电机的本质,扭矩的本质

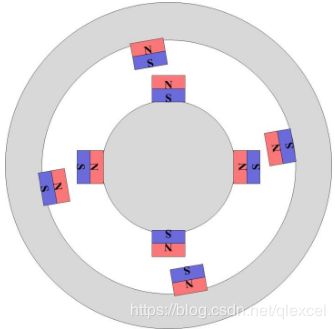
上左图是电机等效模型,现在转子和定子都是完全重合在一起的,不会有扭矩的存在。
上右图,把外面的定子磁场扭转一定角度,根据磁铁异性相吸的原理,内部的转子会跟着旋转,这个时候就存在扭矩了。扭矩的大小怎么衡量呢?
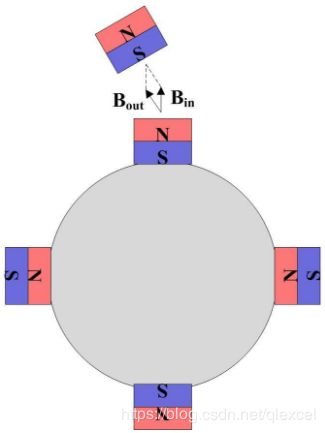
所有的电机,扭矩的大小正比于内外两个磁场的叉乘,也就是两个磁场围成的平行四边形的面积。于是当两个磁场重合,平行四边形面积为0,此时扭矩为0。当两个磁场呈90度,平行四边形面积最大,扭矩也最大。
2、由两个磁场的叉乘引出电机的d轴和q轴的概念
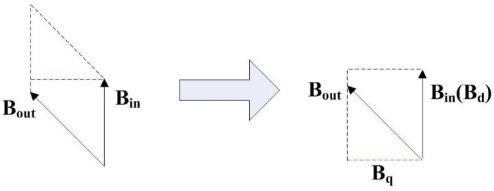
把上面的两个磁场叉乘的平行四边形重新组合成一个矩形,组合前后面积不变。这个时候扭矩的大小就可以用平行于内磁场的磁场大小(我们称为d轴,direct,也称直轴。其大小等于内磁场+外磁场在内磁场方向上的分量)乘上垂直于内磁场的大小(我们称为q轴,quadrature,也称交轴。其大小等于外磁场在内磁场垂直方向上的分量)。
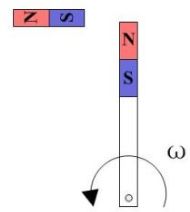
现在对于电机扭矩大小的控制就变成了q轴和d轴大小乘积的控制。在PMSM中,内磁场的大小是永磁铁产生的,是恒定的。外磁场是由线圈绕组产生的,外磁场与内磁场之间的夹角和外磁场的大小,都可以被控制。比如:例1、假设内磁场在0度,大小为1,我们可以控制电机绕组产生超前于内磁场45度的外磁场,大小为2,则总的扭矩大小为1*2*sin(45)。例2、假设内磁场在0度,大小为1,我们控制电机绕组产生超前于内磁场90度的外磁场,大小为2,则总的扭矩大小为1*2*sin(90)。可知当内外两个磁场方向垂直时,外磁场产生相同大小磁场,得到的扭矩最大。也就是下面这种样子:
在d轴上面施加磁场只能影响转子的磁场,并不能得到扭矩。因此我们说:d轴控制转子磁通,q轴控制电机的转矩输出,一般的使用中我们只需要控制电机的转矩输出即可,可以直接把d轴设置为0。
3、反park变换
我们能控制的因素其实只有:1、外磁场在d、q轴上的大小。2、外磁场的角度。
我们要做的事情其实只是:用编码器测量转子的电角度,然后根据转子的电角度(内磁场的角度)用电机绕组产生设置了d、q轴大小的外磁场。
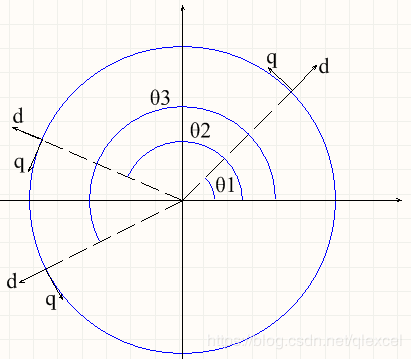
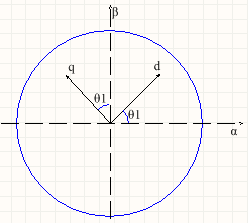
如上图所示,如果转子的电角度在θ1,则我们就要在θ1处产生d、q轴大小的外磁场。如果转子的电角度在θ2,则我们就要在θ2处产生d、q轴大小的外磁场。好了,现在我们引入第一个变换:反park变换(你也许会问,为什么要变换呢?这个就跟式子化简或者变形金刚变形一样,变过去又可以变回来,不过你可能会发现,明明都是一样的东西,变个形态,怎么问题就变得这么简单)
我们把角度θ1的情况单独提出来,把它移到原点去,然后把x、y轴重命名为α,β:
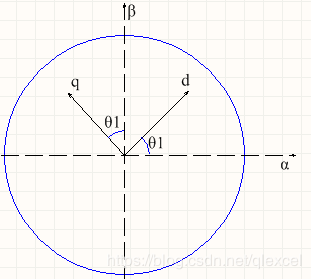
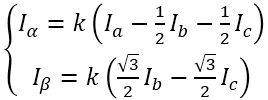
根据空间矢量的关系,我们可以把q、d轴的大小分解到α,β轴上:

如果d轴等于0:
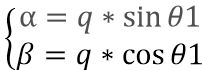
上面这个式子的意义是:互差90度的大小随正弦规律变化的两个磁场,可以产生大小恒定的旋转磁场。
(此处差一个gif图。。。)
有没有发现分解到α,β轴上的式子其实就是svpwm算法的输入?详情看这儿SVPWM算法原理及详解
行了,怎么控制电机已经说完了,总结一下:控制PMSM只需要4步:第一步,选定q、d轴的值(比如q=2,d=0)。第二步,用编码器测量转子电角度。第三步,用上面的式子计算α,β值。第四步,把α,β输入SVPWM。
到这里我们已经用上面的4个步骤让电机转起来了,可是还存在几个问题:1、我怎么知道电机有没有按照我设定的q、d值来转呢?2、设定q、d值只能控制扭矩,我如果要控制电机的速度和位置怎么办?这些问题都是上面那个开环系统解决不了的,这个时候就要引入闭环了。
4、clark变换
我们先测量电机的3相电流,但是从SVPWM知道,电机的3相电流是这样的:
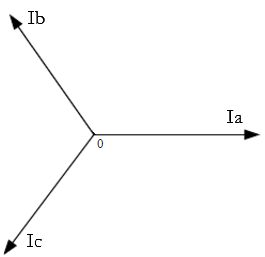
是互差120度的三个分磁场,但是我们只需要互差90度的两个磁场。于是又要用一个变换,把3个分磁场变换成两个分磁场:
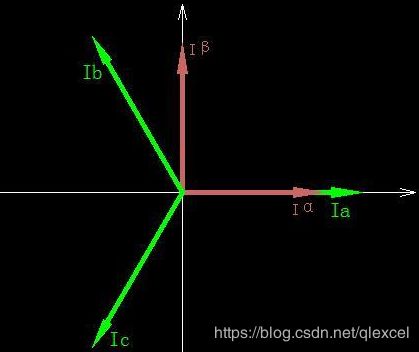
公式就是矢量分解:
变换中有一个系数k,一般取2/3,有兴趣可以去这儿了解:https://blog.csdn.net/daidi1989/article/details/89926324
5、park变换
再把α,β轴上值通过反park变换的逆过程,park变换,得到q、d轴的值。

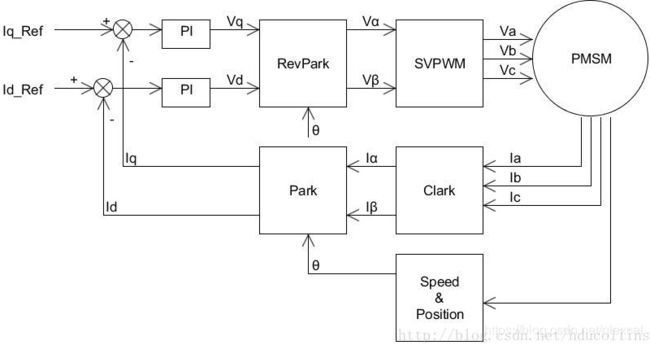
6、现在我们就实现了FOC的整个过程,框图如下:
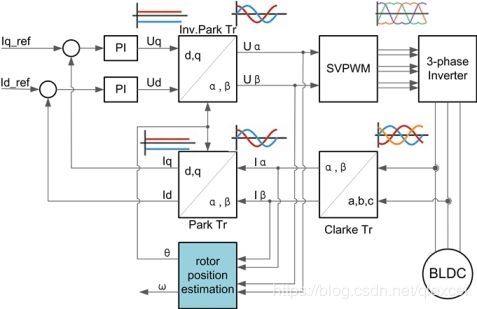
1、测量q、d轴的值:测量电机的相电流(测量两相,通过Ia+Ib+Ic=0得到第三相),然后通过clark变换得到Iα和Iβ,然后通过park变换得到q、d轴的值。
2、把测量到的d、q轴值与我们设定的做对比,如果大了要减小,小了要增大。(目标是让测量值与我们的设定值相同)
3、通过PID后的控制结果输出给SVPWM执行。
例如:1、设定q=2、d=0,通过测量得到q=1.5、d=0.5,这个时候就有误差了,于是把误差值输入PID,得到PID计算之后的消除误差的控制值,这个控制值还是q、d轴的值,再经过反park变换得到α,β,输出给SVPWM,这就完成了一个控制环路,这个控制环路的目的就是让测量到的q、d值等于他们的设定值,控制q、d值其实就是控制电流值,于是这个环路就叫电流环。
2、设定电机转速2000RPM,通过测量得到当前转速1000,于是要加快旋转。怎么加快旋转呢?我们只能控制q、d这两个值,当然是增大q轴的值,加大扭矩咯。于是改变q轴的设定值,之前是2,现在改为3。电机的速度快起来了,可是超过了2000,于是又要把q轴的设定值减小。这个环路就是速度环,即在电流环的外面加一层,速度环通过改变q、d设定值来改变速度。

3、当然还有位置环,计算位置误差,计算参考速度,然后输出给速度环。
部分图片来自:https://blog.csdn.net/u010671230/article/details/79478582,侵删。