【SVPWM】SVPWM算法推导及其Simulink仿真(一)
七段式 SVPWM 关键公式
- 前言
- SVPWM生成流程
- 判断扇区
- 计算占空比
- 计算每个扇区中基本矢量的持续时间
- 计算三路占空比
前言
有关原理部分请参照 SVPWM算法原理及详解 和 SVPWM的原理及法则推导和控制算法详解(他们的公式慎用,有些有坑,看原理就行了)。本文主要讲解七段式SVPWM的实现方法以及关键公式推导与其结果。本算法经过了Simulink仿真以及STM32F407ZGT6、STM32F334C8T6、STM32F334R8T6等途径验证。如果你不想了解原理,也可以跳过这些,直接看这篇文章 SVPWM的Simulink实现。
SVPWM生成流程
其中 Uref 是期望电压矢量的模,角度 θ \theta θ是它与 α \alpha α轴的夹角。且
U r e f = m U d c 3 U_{ref} = \frac{mU_{dc}}{\sqrt{3}} Uref=3mUdc
其中m是调制系数,当 m > 1 m>1 m>1时会过调制,波形失真。此时 Uref 超出了图1中正六边形的内切圆范围。而Uref的最大值就是非零电压矢量的值,为 2 U d c 3 \dfrac{2U_{dc}}{3} 32Udc。

由于三项电压互差 12 0 ∘ 120^\circ 120∘,以其中一项为例,它的相电压调制函数和线电压调制函数(也就是SVPWM滤过波之后的)分别是:
U a ( θ ) = { 3 2 U r e f cos ( θ − π 6 ) , 0 ≤ θ < π 3 , π ≤ θ < 4 π 3 3 2 U r e f cos ( θ ) , π 3 ≤ θ < 2 π 3 , 4 π 3 ≤ θ < 5 π 3 3 2 U r e f cos ( θ + π 6 ) , 2 π 3 ≤ θ < π , 5 π 3 ≤ θ < 2 π U_{a}(\theta)=\begin{cases}\dfrac{\sqrt{3}}{2}U_{ref}\cos(\theta-\dfrac{\pi}{6}),& 0\leq\theta<\dfrac{\pi}{3},\pi\leq\theta<\dfrac{4\pi}{3} \cr\cr \dfrac{3}{2}U_{ref}\cos\left(\theta\right),& \dfrac{\pi}{3}\leq\theta<\dfrac{2\pi}{3},\dfrac{4\pi}{3}\leq\theta<\dfrac{5\pi}{3} \cr\cr \dfrac{\sqrt{3}}{2}U_{ref}\cos(\theta+\dfrac{\pi}{6}), &\dfrac{2\pi}{3}\leq\theta<\pi,\dfrac{5\pi}{3}\leq\theta<2\pi\end{cases} Ua(θ)=⎩⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎧23Urefcos(θ−6π),23Urefcos(θ),23Urefcos(θ+6π),0≤θ<3π,π≤θ<34π3π≤θ<32π,34π≤θ<35π32π≤θ<π,35π≤θ<2π
U a b ( θ ) = U a ( θ ) − U b ( θ ) = 3 U r e f sin ( θ + π 3 ) U_{ab}(\theta)=U_{a}(\theta)-U_{b}(\theta)=\sqrt{3}U_{ref}\sin\left(\theta+\dfrac{\pi}{3}\right) Uab(θ)=Ua(θ)−Ub(θ)=3Urefsin(θ+3π)
因此SVPWM逆变器相电压最大幅值为 3 2 × 2 U d c 3 = U d c 3 \frac{\sqrt{3}}{2}\times\frac{2U_{dc}}{3}=\frac{U_{dc}}{\sqrt{3}} 23×32Udc=3Udc
从调制波函数来看,相电压输出的是不规则的分段函数,为马鞍波形。而线电压输出的则是正弦波形。
判断扇区
七段式 SVPWM 共有5个非零矢量和2个零矢量,这5个非零矢量将平面分成了6个扇区,如图所示。
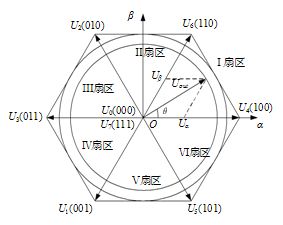
首先我们要根据 U α U_\alpha Uα 和 U β U_\beta Uβ 判断出扇区N。由矢量图几何关系分析,可以判断出合成电压矢量 Uref 落在第 X扇区的充分必要条件,因此得出下表:
| 扇区 | 落在此扇区的充要条件 |
|---|---|
| I | U α > 0 U_\alpha>0 Uα>0, U β > 0 U_\beta>0 Uβ>0 且 U β U α < 3 \dfrac{U_{\beta}}{U_\alpha}<\sqrt{3} UαUβ<3 |
| II | U β > 0 U_\beta>0 Uβ>0 且 U β ∣ U α ∣ > 3 \dfrac{U_{\beta}}{\vert U_\alpha\vert}>\sqrt{3} ∣Uα∣Uβ>3 |
| III | U α < 0 U_\alpha<0 Uα<0, U β > 0 U_\beta>0 Uβ>0 且 − U β U α < 3 \dfrac{-U_{\beta}}{U_\alpha}<\sqrt{3} Uα−Uβ<3 |
| IV | U α < 0 U_\alpha<0 Uα<0, U β < 0 U_\beta<0 Uβ<0 且 U β U α < 3 \dfrac{U_{\beta}}{U_\alpha}<\sqrt{3} UαUβ<3 |
| V | U β < 0 U_\beta<0 Uβ<0 且 − U β ∣ U α ∣ > 3 \dfrac{-U_{\beta}}{\vert U_\alpha\vert}>\sqrt{3} ∣Uα∣−Uβ>3 |
| VI | U α > 0 U_\alpha>0 Uα>0, U β < 0 U_\beta<0 Uβ<0 且 − U β U α < 3 \dfrac{-U_{\beta}}{U_\alpha}<\sqrt{3} Uα−Uβ<3 |
进一步观察分析可得扇区N完全由 U β , 3 U α − U β , − 3 U α − U β U_\beta,\sqrt{3}U_\alpha-U_\beta,-\sqrt{3}U_\alpha-U_\beta Uβ,3Uα−Uβ,−3Uα−Uβ 三个式子的正负来决定。因此若定义 { U 1 = U β U 2 = 3 U α − U β U 3 = − 3 U α − U β \begin{cases}U_1=U_\beta \cr U_2=\sqrt{3}U_\alpha-U_\beta \cr U_3=-\sqrt{3}U_\alpha-U_\beta\end{cases} ⎩⎪⎨⎪⎧U1=UβU2=3Uα−UβU3=−3Uα−Uβ
且若
U 2>0, B=1 , 否则 B=0;
U 3>0, C=1 , 否则 C=0;
可以看出 A,B,C 之间共有八种组合,但由判断扇区的公式可知 A,B,C 不会同时为 1 或同时为 0,所以实际的组合是六种,A,B,C 组合取不同的值对 应着不同的扇区,并且是一一对应的,因此完全可以由 A,B,C 的组合判断所在的扇区。为区别六种状态,令 N=4C+2B+A,则可以通过下表计算参考电压矢量 Uref 所在的扇区。
| N | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| 扇区 | II | VI | I | IV | III | V |
C语言实现:
#define Sqrt3 1.732050808f
void JudgeArea(svpwm_variables * svpwm_v)
{
//看不清楚可以删掉所有代码段中的'svpwm_v->'
char A,B,C,T;
A = (svpwm_v->Ub)>0? 1:0;
B = (Sqrt3*svpwm_v->Ua - svpwm_v->Ub)>0? 1:0;
C = (-Sqrt3*svpwm_v->Ua - svpwm_v->Ub)>0? 1:0;
T = A + 2*B +4*C;
switch (T)
{
case 1: svpwm_v->N=2;break;
case 2: svpwm_v->N=6;break;
case 3: svpwm_v->N=1;break;
case 4: svpwm_v->N=4;break;
case 5: svpwm_v->N=3;break;
case 6: svpwm_v->N=5;break;
default: svpwm_v->N=1;break;
}
}
计算占空比
计算每个扇区中基本矢量的持续时间
传统计算使用到了角度以及三角函数,较为繁琐,实际上利用 U α , U β U_\alpha,U_\beta Uα,Uβ 就可以得出结论。以扇区III为例,求解方程组后得出各矢量持续时间为 T 2 = T K 3 U β U d c T_2 = T_K\dfrac{\sqrt{3}U_{\beta}}{U_{dc}} T2=TKUdc3Uβ T 3 = − T K 3 U α + 3 U β 2 U d c T_3 = -T_K\dfrac{3U_{\alpha}+\sqrt{3}U_{\beta}}{2U_{dc}} T3=−TK2Udc3Uα+3Uβ T 0 = T 7 = T K − T 2 − T 3 2 T_0 = T_7=\dfrac{T_K-T_2-T_3}{2} T0=T7=2TK−T2−T3
其中TK是开关周期。若计算出所有扇区的基矢持续时间发现如此可简化运算,定义
{ X = 3 U β Y = 3 U α + 3 U β 2 Z = − 3 U α + 3 U β 2 \begin{cases}X=\sqrt{3}U_{\beta}\cr Y=\dfrac{3U_{\alpha}+\sqrt{3}U_{\beta}}{2}\cr Z=\dfrac{-3U_{\alpha}+\sqrt{3}U_{\beta}}{2}\end{cases} ⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧X=3UβY=23Uα+3UβZ=2−3Uα+3Uβ
再定义TX是主矢量,TY是辅矢量(如I扇区中TX=T4,TY=T6;III扇区中TX=T2,TY=T3)。则可根据扇区N来简化计算:
| 扇区 | I | II | III | IV | V | VI |
|---|---|---|---|---|---|---|
| TX | -Z | Y | X | Z | -Y | -X |
| TY | X | Z | -Y | -X | -Z | Y |
C语言实现:
//已经定义过Sqrt3了
void CacuTime(svpwm_variables * svpwm_v)
{
float x,y,z;
float Dx,Dy,Dz;//Tz是零矢量持续时间比
//你看我x y z的表达式里边已经把开关周期除了,实际上这是持续时间占开关周期的比例
x = Sqrt3*svpwm_v->Ub;
y = (3*svpwm_v->Ua +Sqrt3*svpwm_v->Ub)/2;
z = (-3*svpwm_v->Ua +Sqrt3*svpwm_v->Ub)/2;
switch(svpwm_v->N)
{
case 1: Dx = -z;Dy = x;break;
case 2: Dx = y;Dy = z;break;
case 3: Dx = x;Dy = -y;break;
case 4: Dx = z;Dy = -x;break;
case 5: Dx = -y;Dy = -z;break;
case 6: Dx = -x;Dy = y;break;
default:Dx = -z;Dy = x;break;
}
Dz = 1-(Dx+Dy);
}
计算三路占空比
为了尽量减少开关次数,这里的PWM的定时器模式使用了中心对称模式(有疑问可看这里边沿对齐PWM和中心对齐PWM)在这里我以扇区I、II、III为例说明三路PWM的占空比与扇区N计算规律。
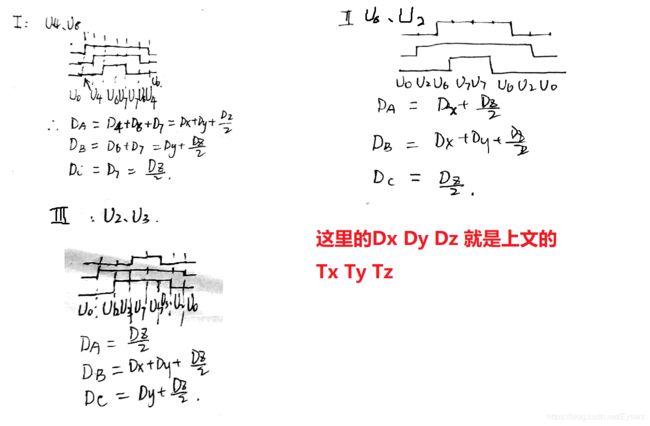
由于占空比是比例这里我把TX、TY、TZ同除以TK,分别记为DX、DY、DZ可总结出规律如下:
| 扇区N | I | II | III | IV | V | VI |
|---|---|---|---|---|---|---|
| DutyA | Dx+Dy+Dz/2 | Dx+Dz/2 | Dz/2 | Dz/2 | Dy+Dz/2 | Dx+Dy+Dz/2 |
| DutyB | Dy+Dz/2 | Dx+Dy+Dz/2 | Dx+Dy+Dz/2 | Dx+Dz/2 | Dz/2 | Dz/2 |
| DutyC | Dz/2 | Dz/2 | Dy+Dz/2 | Dx+Dy+Dz/2 | Dx+Dy+Dz/2 | Dx+Dz/2 |
C语言实现:
void CacuPWMDuty(svpwm_variables * svpwm_v)
{
//Dx Dy Dz 已经由上一个函数计算得出
switch(svpwm_v->N)
{
case 1:
svpwm_v->DutyA = Dx+Dy+Dz/2;
svpwm_v->DutyB = Dy+Dz/2;
svpwm_v->DutyC = Dz/2;
break;
case 2:
svpwm_v->DutyA = Dx+Dz/2;
svpwm_v->DutyB = Dx+Dy+Dz/2;
svpwm_v->DutyC = Dz/2;
break;
case 3:
svpwm_v->DutyA = Dz/2;
svpwm_v->DutyB = Dx+Dy+Dz/2;
svpwm_v->DutyC = Dy+Dz/2;
break;
case 4:
svpwm_v->DutyA = Dz/2;
svpwm_v->DutyB = Dx+Dz/2;
svpwm_v->DutyC = Dx+Dy+Dz/2;
break;
case 5:
svpwm_v->DutyA = Dy+Dz/2;
svpwm_v->DutyB = Dz/2;
svpwm_v->DutyC = Dx +Dy +Dz/2;
break;
case 6:
svpwm_v->DutyA = Dx+Dy+Dz/2;
svpwm_v->DutyB = Dz/2;
svpwm_v->DutyC = Dx+Dz/2;
break;
default:svpwm_v->DutyA = Dx+Dy+Dz/2;svpwm_v->DutyB = Dy+Dz/2;svpwm_v->DutyC=Dz/2;break;
}
}
其实到这就差不多了,实际操作生成SVPWM时还需要在每个开关周期的中断重新调用这几个函数。暂时想不到还有什么,想到了再补充。