两个编程示例学习DSP定时器与中断系统
前面的学习中介绍了CPU定时器与中断系统,下面借助两个实例回顾下之前的学习内容!
实例1:利用蜂鸣器模拟基本音级
1.1 蜂鸣器的工作原理
蜂鸣器发声原理是电流通过电磁线圈,使电磁线圈产生磁场来驱动振动膜发声的,因此需要一定的电流才能驱动它,单片机 IO 引脚输出的电流较小,单片机输出的 TTL 电平基本上驱动不了蜂鸣器,因此需要增加一个电流放大的电路。实验板通过一个三极管 Q1 来放大驱动蜂鸣器。
1.2 蜂鸣器的分类
蜂鸣器按其是否带有信号源又分为有源和无源两种类型。有源蜂鸣器只需要在其供电端加上额定直流电压,其内部的震荡器就可以产生固定频率的信号,驱动蜂鸣器发出声音。无源蜂鸣器可以理解成与喇叭一样,需要在其供电端上加上高低不断变化的电信号才可以驱动发出声音。对于有源和无源的驱动方式,略有不同,先讲解一下有源蜂鸣器的驱动方法。有源蜂鸣器因为内含有信号源,因此只要加上额定的工作电压就可以发出固定频率的声音。对于无源的蜂鸣器,驱动其发出声音就较为复杂,因为它本身不带信号源,因此,只是通上电源,是不能发出声音的,必须要不断的重复“通电-断电”,才能使其发出声音,我们可以通过编写程序,控制 GPIO口不断的置为高电平—低电平—高电平…,这样蜂鸣器就可以不断的通、断电,从而发出声音。而通电、断电的时间不同,相当于振荡周期的不同,因此又可以得到不同频率的声音。
1.3 蜂鸣器的硬件电路图
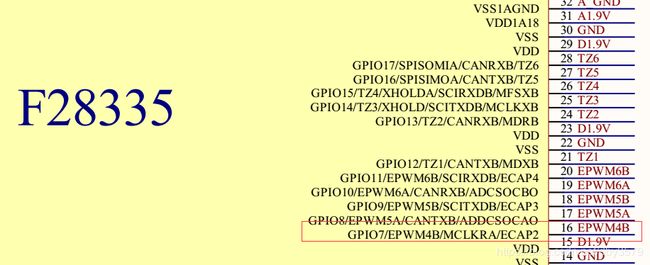
从下面的电路图中可以看出,控制蜂鸣器发生的高低电平输入信号接口为GPIO7。通过控制GPIO7开启关闭的时间不同,就可以控制蜂鸣器得到不同频率的声音信号。

1.4 DSP如何输出组频率
为了让 dsp 发出不同频率的声音,采用定时中断来计算延时时间,只需将定时器预置不同的定时值就可实现不同时间的定时。以标准音高 A 为例: A 的频率 f=440Hz,其对应的周期为: T=1/f=1/440=2272us。
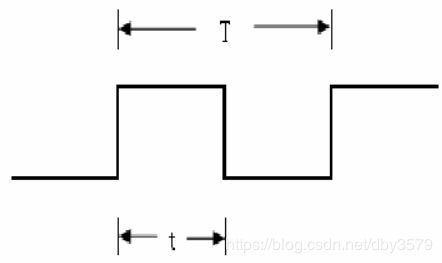
DSP 控制蜂鸣器的波形图,通过对 GPIO端口 循环的置位、清零来达到输出固定频率波形,相对于 A 音频率 440Hz 如图 T=2272us,那么 t=T/2=2272/2=1136us 所以,我们只要在程序中将 GPIO置为高电平,延时 1136us,再置为低电平,延时 1136us,如此循环,就可以得到440Hz 频率的声音。

1.5 代码实例
#include "DSP2833x_Device.h" // DSP2833x Headerfile Include File
#include "DSP2833x_Examples.h" // DSP2833x Examples Include File
/****************端口宏定义*****************/
#define BUZZ_CLK_GENER GpioDataRegs.GPATOGGLE.bit.GPIO7 = 1; //蜂鸣器控制IO电平翻转
#define BELL_DIR GpioCtrlRegs.GPADIR.bit.GPIO7 //定义IO输出方向
#define BELL_DAT GpioDataRegs.GPADAT.bit.GPIO7 //定义IO寄存器数值
#define DISABLE_TIMER1_INT IER &= 0xFFFE; //CPU中断使能标志位清除
#define ENABLE_TIMER1_INT IER |= M_INT1; //CPU中断使能标志位使能
#define BUZZ_OFF GpioDataRegs.GPACLEAR.bit.GPIO7 = 1; //IO输出清除
Uint16 Musi[23]=
{ //单位 us,不同频率下,蜂鸣器发出不同音调的声音
0,
3816, //L_do
3496, //L_re
3215, //L_mi
2865, //L_fa
2551, //L_so
2272, //L_la
2024, //L_xi
1912, //do
1703, //re
1517, //mi
1432, //fa
1275, //so
1136, //la
1013, //xi
956, //H_do
851, //H_re
758, //H_mi
716, //H_fa
638, //H_so
568, //H_la
506, //H_xi
0xFF //STOP
};
Uint16 Song[]={1,2,3,4,5,6,7}; //乐谱:do,re,mi,fa,so,la,xi
/****************函数声明*******************/
void Init_Bell(void);
interrupt void cpu_timer0_isr(void);
void Delay(Uint16 t);
void main(void)
{
Uint16 addr=0;
Uint16 k;
InitSysCtrl(); // 初始化系统控制:
BELL_DAT=0; //设置端口为低电平
Init_Bell(); //设置蜂鸣器端口输出
DINT; // 禁止CPU全局中断
InitPieCtrl(); // 初始化PIE控制寄存器到他们的默认状态,即禁止PIE中断及清除所有PIE中断标志
IER = 0x0000; // 禁止CPU中断和清除所有CPU中断标志
IFR = 0x0000;
InitPieVectTable(); //初始化PIE中断向量表,并使其指向中断服务子程序(ISR)
EALLOW; //解除寄存器保护
PieVectTable.TINT0 = &cpu_timer0_isr;// 本例中的中断重新映射到本文件中的中断服务子程序中
EDIS; // 添加寄存器保护
InitCpuTimers(); // 初始化片内外设,本例仅需要初始化CPU定时器
ConfigCpuTimer(&CpuTimer0, 150, 1000000);// 配置CPU定时器1每秒发生一次中断
StartCpuTimer0(); //开始计时器
IER |= M_INT1; //使能CPU中断线INT1,连接到CPU定时器0的;
PieCtrlRegs.PIEIER1.bit.INTx7 = 1;// 使能PIE组1中断7,TINT0中断;
EINT; // 使能全局中断INTM
ERTM; // 使能全局实时中断DBGM
for(k=0;k<7;k++) // 步骤 6. 中断控制蜂鸣器开关频率,延时函数定义乐拍,7次循环分别让蜂鸣器响7种乐声:
{
StopCpuTimer0(); //停止计数
DISABLE_TIMER1_INT; //不使能定时器中断
ConfigCpuTimer(&CpuTimer0, 150, Musi[Song[addr]+14]/2); //根据音节的频率设置定时时间
StartCpuTimer0(); //重启定时器
ENABLE_TIMER1_INT; //使能定时中断
Delay(8); //音乐节拍延时
StopCpuTimer0(); //停止计数
DISABLE_TIMER1_INT; //不使能定时中断
BUZZ_OFF; //关闭蜂鸣器
Delay(2); //音乐停顿
addr++; //连续发出乐谱:do,re,mi,fa,so,la,xi
}
while(1);
}
/*-----------------------------------------*/
/*形式参数:void */
/*返回值:void */
/*函数描述:初始化蜂鸣器端口为输出 */
/*-----------------------------------------*/
void Init_Bell(void)
{
EALLOW; //解除寄存器保护
BELL_DIR=1;//Bell端口输出
EDIS; //寄存器保护
}
/*------------------------------------------*/
/*形式参数:void */
/*返回值:void */
/*函数描述:定时器CPU0中断服务子程序 */
/*------------------------------------------*/
interrupt void cpu_timer0_isr(void)
{
CpuTimer0.InterruptCount++;
BUZZ_CLK_GENER; //GPIO口输出电平翻转
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1; //PIEACK标志位置位,告诉PIE可以接受本组其他中断处理
}
void Delay(Uint16 t) //延时函数
{
Uint32 i=0;
Uint32 gain = 300000;
Uint32 base=0;
base=gain*t;
for(i=0;i<=base;i++);
}
实例2:利用定时器中断实现LED灯变频闪烁
实例比较简单,直接上源码。
#include "DSP2833x_Device.h" // DSP2833x Headerfile Include File
#include "DSP2833x_Examples.h" // DSP2833x Examples Include File
/***************************************************************************************************
**Description ** 全局变量定义
***************************************************************************************************/
volatile unsigned int timer_int_cnt;
interrupt void cpu_timer0_isr(void);
interrupt void cpu_timer1_isr(void);
interrupt void cpu_timer2_isr(void);
void Gpio_select(void);
void main(void)
{
InitSysCtrl(); // 初始化系统控制,包括看门狗、PLL、外部时钟
Gpio_select(); // 初始化使用到的GPIO口;
DINT; //禁止CPU中断
InitPieCtrl(); //初始化PIE控制寄存器到他们的默认状态,即禁止PIE中断及清除所有PIE中断标志
IER = 0x0000; // 禁止CPU中断
IFR = 0x0000; // 清除所有CPU中断标志
InitPieVectTable();//初始化PIE中断向量表,并使其指向中断服务子程序(ISR)
EALLOW; //解除寄存器保护
PieVectTable.TINT0 = &cpu_timer0_isr; //PIE组1第7个中断为定时器Timer0(外设中断)
PieVectTable.XINT13 = &cpu_timer1_isr; //TINT13为CPU定时器中断Timer1(内部中断源)
PieVectTable.TINT2 = &cpu_timer2_isr; //TINT2为CPU定时器中断Timer2(内部中断源)
EDIS; //寄存器保护
InitCpuTimers(); // 初始化CPU定时器
#if (CPU_FRQ_150MHZ) // 配置CPU定时器 0, 1, and 2 中断周期,150MHzCPU频率, 周期单位为us;
ConfigCpuTimer(&CpuTimer0, 150, 100000); //Timer0定时器中断周期为0.1s
ConfigCpuTimer(&CpuTimer1, 150, 200000); //Timer1定时器中断周期为0.2s
ConfigCpuTimer(&CpuTimer2, 150, 400000); //Timer2定时器中断周期为0.4s
#endif
CpuTimer0Regs.TCR.all = 0x4001; // 设置TIE = 1,开启定时器0中断
CpuTimer1Regs.TCR.all = 0x0001; // 设置TIE = 0,关闭定时器1中断
CpuTimer2Regs.TCR.all = 0x0001; // 设置TIE = 0,关闭定时器2中断
IER |= M_INT1; //使能CPU中断线INT1
IER |= M_INT13; //使能CPU中断线INT13
IER |= M_INT14; //使能CPU中断线INT14
PieCtrlRegs.PIEIER1.bit.INTx7 = 1; //使能PIE组1第七位的使能标志位
EINT; // 使能全局中断INTM
ERTM; // 使能全局实时中断DBGM
timer_int_cnt = 0;
for(;;);
}
interrupt void cpu_timer0_isr(void) //Timer0中断处理函数
{
CpuTimer0.InterruptCount++;
EALLOW;
if(timer_int_cnt++ >= 12)
{
timer_int_cnt = 0;
CpuTimer0Regs.TCR.all = 0x0001; // 设置TIE = 0,关闭定时器0中断
CpuTimer1Regs.TCR.all = 0x4001; // 设置TIE = 1,开启定时器1中断
CpuTimer2Regs.TCR.all = 0x0001; // 设置TIE = 0,关闭定时器2中断
}
GpioDataRegs.GPBTOGGLE.all =0x30000000;
GpioDataRegs.GPCTOGGLE.all =0x00000007;
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1; //PIEACK标志位置位,告诉PIE可以接受本组其他中断处理
EDIS;
}
interrupt void cpu_timer1_isr(void) //Timer1中断处理函数
{
CpuTimer1.InterruptCount++;
EALLOW;
if( timer_int_cnt++ >= 12)
{
timer_int_cnt = 0;
CpuTimer0Regs.TCR.all = 0x0001; // 设置TIE = 0,关闭定时器0中断
CpuTimer1Regs.TCR.all = 0x0001; // 设置TIE = 0,关闭定时器1中断
CpuTimer2Regs.TCR.all = 0x4001; // 设置TIE = 1,开启定时器2中断
}
GpioDataRegs.GPBTOGGLE.all =0x30000000; //对应的GPIO高低电平翻转
GpioDataRegs.GPCTOGGLE.all =0x00000007; //对应的GPIO高低电平翻转
// The CPU acknowledges the interrupt.
EDIS;
}
interrupt void cpu_timer2_isr(void) //Timer2中断处理函数
{
CpuTimer2.InterruptCount++;
EALLOW;
if( timer_int_cnt++ >= 12)
{
timer_int_cnt = 0;
CpuTimer0Regs.TCR.all = 0x4001; // 设置TIE = 1,开启定时器0中断
CpuTimer1Regs.TCR.all = 0x0001; // 设置TIE = 0,关闭定时器1中断
CpuTimer2Regs.TCR.all = 0x0001; // 设置TIE = 0,关闭定时器2中断
}
GpioDataRegs.GPBTOGGLE.all =0x30000000;
GpioDataRegs.GPCTOGGLE.all =0x00000007;
EDIS;
}
void Gpio_select(void)
{
EALLOW;
GpioCtrlRegs.GPAMUX1.all = 0x00000000; // 对应的引脚复用成IO
GpioCtrlRegs.GPAMUX2.all = 0x00000000; // 对应的引脚复用成IO
GpioCtrlRegs.GPBMUX1.all = 0x00000000; // 对应的引脚复用成IO
GpioCtrlRegs.GPBMUX2.all = 0x00000000; // 对应的引脚复用成IO
GpioCtrlRegs.GPCMUX1.all = 0x00000000; // 对应的引脚复用成IO
GpioCtrlRegs.GPCMUX2.all = 0x00000000; // 对应的引脚复用成IO
GpioCtrlRegs.GPADIR.all = 0xFFFFFFFF; // 对应的引脚用作输出
GpioCtrlRegs.GPBDIR.all = 0xFFFFFFFF; // 对应的引脚用作输出
GpioCtrlRegs.GPCDIR.all = 0xFFFFFFFF; // 对应的引脚用作输出
GpioDataRegs.GPBDAT.all =0x30000000; // 设置对应引脚的高低电平
GpioDataRegs.GPCDAT.all =0x00000007; // 设置对应引脚的高低电平
EDIS;
}