Arduino 智能小车项目 - 寻迹(20180512实训课--华清远见)
1.Arduino 智能小车寻迹原理
寻迹采用的主要原理就是 红外探测法,即利用 红外线在不同颜色的物体表面具有不同的反射性质的特点
Arduino 单片机就是以是否收到反射回来的红外光为依据来确定黑线的 位置和小车的行走路线。
红外探测器探测距离有限,一般最大不应超过15cm。
对于发射和接收红外线的红外探头,可以自己制作或直接采用集成式红外探头

2.Arduino 寻迹模块简介



3.Arduino pwm 调速





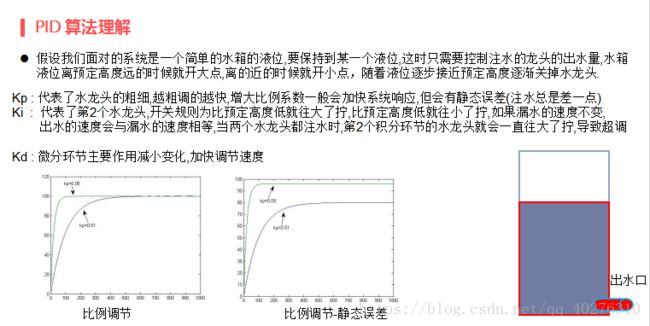
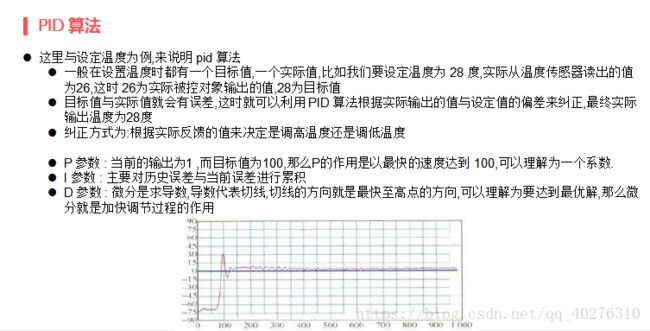
4.PID算法


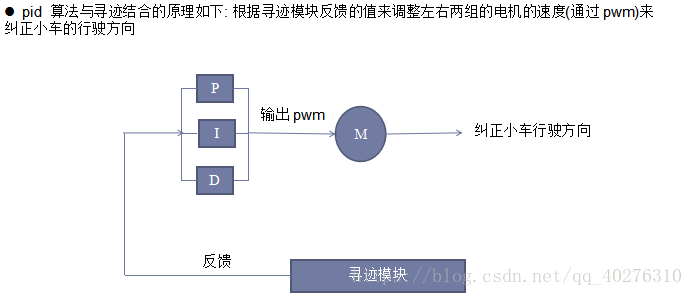
5.PID 算法与寻迹




6.代码:
#include "pid.h"
#ifdef ARDUINO_DEBUG
int debugLeftSpeed;
int debugRightSpeed;
uint8_t debugIrs = 0;
#endif
const float motorSpeed = 140; //小车输出速度
const int IR_PIN[] = {A0, A1, A2, A3, A4}; //寻迹板引脚定义
const int IN_A1 = 7; //
const int IN_A2 = 6; //
const int IN_B1 = 5; //
const int IN_B2 = 4; //
const int _pwmLeftPin = 10;//左边 pwm 引脚
const int _pwmRightPin = 11;//右边 pwm 引脚
pid_t pid;
float pidValue = 0; //pid 值
bool turnFlag = false;
void setup(void)
{
int i;
//设置引脚功能
pinMode(IN_A1, OUTPUT);
pinMode(IN_A2, OUTPUT);
pinMode(IN_B1, OUTPUT);
pinMode(IN_B2, OUTPUT);
//设置寻迹板引脚为 INPUT
for (i = 0; i < 5; i++) {
pinMode(IR_PIN[i], INPUT);
}
pid.sampleTime = SAMPLE_TIME;//初始化采样时间
pid.Kp = KP_VALUE;
pid.Ki = KI_VALUE;
pid.Kd = KD_VALUE;
pid.error = 0;
pid.previous_error = 0;
Serial.begin(115200);//设置波特率
delay(5000);//延时 5s
analogWrite(_pwmLeftPin, motorSpeed );
analogWrite(_pwmRightPin, motorSpeed );
goForward();//小车向前行驶
return;
}
/**
获取寻迹板红外数据
*/
uint8_t getIrData(void)
{
int i, j;
uint8_t level;
uint8_t temp;
uint8_t irs[9] = {0};
//获取10组数据
for (j = 0; j < 9; j ++) {
for (i = 0; i < 5; i++) {
level = digitalRead(IR_PIN[i]);
if (level) {
bitSet(irs[j], i);//设置对应位为1
} else {
bitClear(irs[j], i);//设置对应为0
}
}
}
//对所有的数据进行排序
for (i = 0; i < 9 - 1; i ++) {
for (j = 0; j < 9 - i - 1; j ++) {
if (irs[j] > irs[j + 1]) {
temp = irs[j];
irs[j] = irs[j + 1];
irs[j + 1] = temp;
}
}
}
#ifdef ARDUINO_DEBUG
debugIrs = irs[4];
#endif
//返回中间值
return irs[4];
}
/**
计算误差值
@param irs :获取的寻迹传感器的值
*/
int calcErrorByIrsValue(uint8_t irs)
{
int curError = pid.error;
switch (irs) {
case B11110: curError = -8; break;
case B10000:
case B11000: curError = -7; break;
case B11100: curError = -6; break;
case B11101: curError = -4; break;
case B11001: curError = -2; break;
case B00000:
case B11011: curError = 0; break;
case B10011: curError = 2; break;
case B10111: curError = 4; break;
case B00111: curError = 6; break;
case B00011:
case B00001: curError = 7; break;
case B01111: curError = 8; break;
case B11111: curError = pid.error > 0 ? 9 : - 9; break;
}
return curError;
}
/**
排序函数
*/
void _sortData(int *p, int n)
{
int temp;
int i, j;
for (i = 0; i < n - 1; i ++) {
for (j = 0; j < n - i - 1; j ++) {
if (p[j] > p[j + 1]) {
temp = p[j];
p[j] = p[j + 1];
p[j + 1] = temp;
}
}
}
return;
}
/**
计算误差值
*/
void calcCurrentError(void)
{
int i;
uint8_t irs;
float sum = 0;
int errorData[10];
//获取 10组数据
for (i = 0; i < 10; i ++) {
irs = getIrData();
errorData[i] = calcErrorByIrsValue(irs);
}
_sortData(errorData, 10);
for (i = 1; i < 10 - 1; i ++) {
sum += errorData[i];
}
pid.error = sum / 8;
return;
}
void turnRight(void)
{
digitalWrite(IN_A1, LOW);
digitalWrite(IN_A2, HIGH);
digitalWrite(IN_B1, HIGH);
digitalWrite(IN_B2, LOW);
}
void turnLeft(void)
{
digitalWrite(IN_A1, HIGH);
digitalWrite(IN_A2, LOW);
digitalWrite(IN_B1, LOW);
digitalWrite(IN_B2, HIGH);
}
void goForward(void)
{
digitalWrite(IN_A1, HIGH);
digitalWrite(IN_A2, LOW);
digitalWrite(IN_B1, HIGH);
digitalWrite(IN_B2, LOW);
}
/**
小车控制函数
@param pidValue : 计算出来的 pid 值
@param turnFlag : 方向标志
*/
void motorControl(float pidValue, bool turnFlag)
{
int leftMotorSpeed = 0;
int rightMotorSpeed = 0;
//根据 pid 的值调整小车左右电机的速度
leftMotorSpeed = constrain((motorSpeed + pidValue), -255, 255);
rightMotorSpeed = constrain((motorSpeed - pidValue), -255, 255);
//当转弯标志被设置时,则需要使用左边与右边的轮子 正转与反转来调整,提高调整速度
if (turnFlag) {
//按照较大的 pwm 值进行调整,速度最快,左边速度与右边速度一致
if (abs(leftMotorSpeed) > abs(rightMotorSpeed)) {
leftMotorSpeed = abs(leftMotorSpeed);
rightMotorSpeed = leftMotorSpeed;
} else {
rightMotorSpeed = abs(rightMotorSpeed);
leftMotorSpeed = rightMotorSpeed;
}
} else {
//当速度为正时,则取原值,当速度为负时,则取相反数,保持 pwm 的值为正值
leftMotorSpeed = leftMotorSpeed > 0 ? leftMotorSpeed : -leftMotorSpeed;
rightMotorSpeed = rightMotorSpeed > 0 ? rightMotorSpeed : -rightMotorSpeed;
}
analogWrite(_pwmLeftPin, leftMotorSpeed );
analogWrite(_pwmRightPin, rightMotorSpeed);
#ifdef ARDUINO_DEBUG
debugLeftSpeed = leftMotorSpeed ;
debugRightSpeed = rightMotorSpeed;
#endif
return;
}
/***
计算 pid 的值
*/
bool calculatePid(float *pValue)
{
float P = 0;
static float I = 0 ;
float D = 0 ;
static unsigned long lastTime = 0;
unsigned long now = millis();
int timeChange = now - lastTime;
//没有到达采样时间
if (timeChange < pid.sampleTime) {
return false;
}
P = pid.error;//错误值
I = I + pid.error;//积累误差
D = pid.error - pid.previous_error;//计算错误的变化率
*pValue = (pid.Kp * P) + (pid.Ki * I) + (pid.Kd * D) + 1;
*pValue = constrain(*pValue, -motorSpeed,motorSpeed);
pid.previous_error = pid.error;
lastTime = now;
return true;
}
#if ARDUINO_DEBUG
void print_debug()
{
int i;
String irs2bin = String(debugIrs, 2);
int len = irs2bin.length();
if (len < 5) {
for (i = 0; i < 5 - len; i++) {
irs2bin = "0" + irs2bin;
}
}
Serial.print("IRS : ");
Serial.print(irs2bin);
Serial.print(" ML:");
Serial.print(debugLeftSpeed);
Serial.print(" MR:");
Serial.print(debugRightSpeed);
Serial.print(" ERROR:");
Serial.print(pid.error, OCT);
Serial.println();
}
#endif
/**
计算运动方向
*/
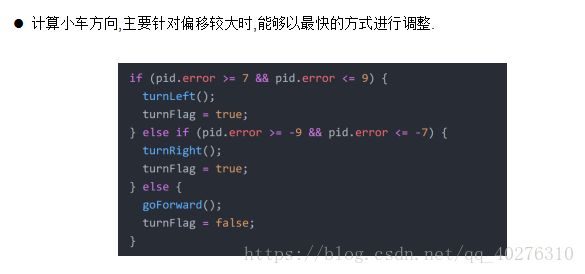
void calcDirection(void)
{
if (pid.error >= 7 && pid.error <= 9) {
turnLeft();
turnFlag = true;
} else if (pid.error >= -9 && pid.error <= -7) {
turnRight();
turnFlag = true;
} else {
goForward();
turnFlag = false;
}
return;
}
void loop(void)
{
bool ok;
float pidValue;
//计算错误值
calcCurrentError();
//计算 pid 的值
ok = calculatePid(&pidValue);
if (ok) {
calcDirection();//计算小车运动方向
motorControl(pidValue, turnFlag);//控制电机
}
//delay(500);
#if ARDUINO_DEBUG
print_debug();
delay(1000);
#endif
return;
}