# cs231n (三)优化问题及方法
cs231n (三)优化问题及方法
标签(空格分隔): 神经网络
文章目录
- cs231n (三)优化问题及方法
- 0.回顾
- 1.引言
- 2. 损失函数是什么东东?
- 3. 最优化
- 办法1:随机搜索(不好)
- 办法2:随机本地试探
- 方法3:跟随梯度--->望眼欲穿法
- 4. 梯度计算
- 5. 微分分析计算梯度
- 6. 梯度下降
- 7. 小批量数据梯度下降(Mini-batch GD):
- 8. Summary
- 转载和疑问声明
- 我祝各位帅哥,和美女,你们永远十八岁,嗨嘿嘿~~~
0.回顾
cs231n (一)图像分类识别讲了KNN
cs231n (二)讲了线性分类器:SVM和SoftMax
回顾上次的内容,其实就会发现,虽然我们构造好了损失函数,可以简单使用导数的定义解决损失函数优化问题,但是并不高效啊,现在探索一下呗。
1.引言
之前(二部分),我们介绍了图像分类任务中的两个关键部分
- 评分函数----> 原始图像像素直接映射为评分值:线性函数
- 损失函数----> 根据分类评分和实际视觉分类差别衡量那个权重矩阵的好坏:SoftMax,SVM.
线性函数的形式是 f ( x i , W ) = W x i f(x_i, W)=Wx_i f(xi,W)=Wxi
SVM实现的公式是:
L = 1 N ∑ i ∑ j ̸ = y i [ m a x ( 0 , f ( x i ; W ) j − f ( x i ; W ) y i + 1 ) ] + λ R ( W ) L=\displaystyle\frac{1}{N}\sum_i\sum_{j\not= y_i}[max(0,f(x_i;W)_j-f(x_i;W)_{y_i}+1)]+\lambda R(W) L=N1i∑j̸=yi∑[max(0,f(xi;W)j−f(xi;W)yi+1)]+λR(W)
L 越小,说明这个权重矩阵W越好呗,那么什么时候最小?
很聪明嘛!我们这次讲的就是最优化问题, 这里可真是大(shu)学问。
2. 损失函数是什么东东?
这里讨论的是高维空间重中的:
大声告诉我:CIFAR-10的线性分类权重矩阵大小是多啊?
10x3073呗 (Class X Dimension)另加了一个1.
我能不能看到啊?
比较困难,但我们可以:在1个维度或者2个维度的方向上对高维空间进行分割
-
例如,随机生成一个权重矩阵W,该矩阵就与高维空间中的一个点对应
然后沿着某个维度方向前进----> 同时记录损失函数值的变化。 -
生成一个随机的方向 W 1 W_1 W1 并且沿着此方向计算损失值,计算方法是根据不同的a 值来计算 L ( W + a W 1 ) L(W+ a W_1) L(W+aW1)。
这个过程将生成一个图表,其x轴是a值,y轴是损失函数值。同样的方法还可以用在两个维度上,通过改变a,b来计算损失值 L ( W + a W 1 + b W 2 ) L(W+aW_1+bW_2) L(W+aW1+bW2),从而给出二维的图像。在图像中,a,b可以分别用x和y轴表示,而损失函数的值可以用颜色变化表示:
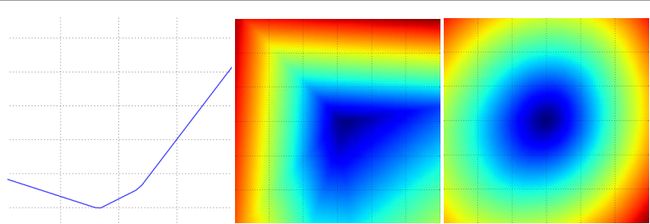
一个无正则化的SVM的损失函数就是看上面,左中分别有一个数据,右是10个
左:a值渐变时,及某个维度方向上对应的的损失值变化
中右:蓝色部分是低损失值区域,红色部分是高损失值区域
对于一个图像数据,损失函数的计算公式如下:
L i = ∑ j ̸ = y i [ m a x ( 0 , w j T x i − w y i T x i + 1 ) ] Li=\sum_{j\not=y_i}[max(0,w^T_jx_i-w^T_{y_i}x_i+1)] Li=j̸=yi∑[max(0,wjTxi−wyiTxi+1)]
假设有一个简单的数据集,其中包含有3个只有1个维度的点,数据集数据点有3个类别。那么完整的无正则化SVM的损失值计算如下:
L 0 = m a x ( 0 , w 1 T x 0 − w 0 T x 0 + 1 ) + m a x ( 0 , w 2 T x 0 − w 0 T x 0 + 1 ) L_0=max(0,w^T_1x_0-w^T_0x_0+1)+max(0,w^T_2x_0-w^T_0x_0+1) L0=max(0,w1Tx0−w0Tx0+1)+max(0,w2Tx0−w0Tx0+1)
L 1 = m a x ( 0 , w 0 T x 1 − w 1 T x 1 + 1 ) + m a x ( 0 , w 2 T x 1 − w 1 T x 1 + 1 ) L_1=max(0,w^T_0x_1-w^T_1x_1+1)+max(0,w^T_2x_1-w^T_1x_1+1) L1=max(0,w0Tx1−w1Tx1+1)+max(0,w2Tx1−w1Tx1+1)
L 2 = m a x ( 0 , w 0 T x 2 − w 2 T x 2 + 1 ) + m a x ( 0 , w 1 T x 2 − w 2 T x 2 + 1 ) L_2=max(0,w^T_0x_2-w^T_2x_2+1)+max(0,w^T_1x_2-w^T_2x_2+1) L2=max(0,w0Tx2−w2Tx2+1)+max(0,w1Tx2−w2Tx2+1)
L = ( L 0 + L 1 + L 2 ) / 3 L=(L_0+L_1+L_2)/3 L=(L0+L1+L2)/3
对于一维数据, x i x_i xi和权重 w j w_j wj都是数字,从 w 0 w_0 w0,可以看到上面的式子中一些项是 w 0 w_0 w0的线性函数,且每一项都会与0比较,取两者的最大值。
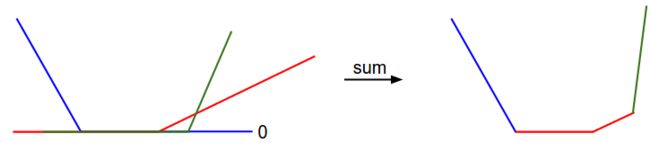
那么:x轴方向就是一个权重,y轴就是损失值
每个部分 1.是某个权重的独立部分,2.是该权重的线性函数与0阈值的比较。完整的SVM数据损失就是这个形状的30730维版本(3073*10).
对:就是凸函数 ,人家还出了课程:最优化凸函数
由于max,则SVM函数产生不可导的点,那么这个损失函数不可微,所以梯度没有意义,这里用到了次梯度。
3. 最优化
失函数可以量化某个具体权重集W的质量,最优化的目标:到能够最小化损失函数值的W
办法1:随机搜索(不好)
随机尝试很多不同的权重,然后看其中哪个最好,就是瞎蒙呗,你想想能好么?
# X_train的每一列都是一个数据样本(3073 x 50000的数组)
# Y_train是数据样本的类别标签(1x50000的数组)
# 函数L即损失函数
bestloss = float("inf") # Python assigns the highest possible float value
for num in xrange(1000):
W = np.random.randn(10, 3073) * 0.0001 # generate random parameters
loss = L(X_train, Y_train, W) # get the loss over the entire training set
if loss < bestloss: # keep track of the best solution
bestloss = loss
bestW = W
print 'in attempt %d the loss was %f, best %f' % (num, loss, bestloss)
# in attempt 0 the loss was 9.401632, best 9.401632
# in attempt 1 the loss was 8.959668, best 8.959668
# in attempt 2 the loss was 9.044034, best 8.959668
# in attempt 3 the loss was 9.278948, best 8.959668
# in attempt 4 the loss was 8.857370, best 8.857370
# in attempt 5 the loss was 8.943151, best 8.857370
# in attempt 6 the loss was 8.605604, best 8.605604
# ... (trunctated: continues for 1000 lines)
结果可想而知,L是有大有小,不管怎么样,先用测试集试试
# Assume X_test is [3073 x 10000], Y_test [10000 x 1]
scores = Wbest.dot(Xte_cols) # 10 x 10000, the class scores for all test examples
# find the index with max score in each column (the predicted class)
Yte_predict = np.argmax(scores, axis = 0)
# and calculate accuracy (fraction of predictions that are correct)
np.mean(Yte_predict == Yte)
# returns 0.1555
表现最好的权重W跑测试集的准确率是15.5%,瞎蒙就是10%,好学生!
关键思路:迭代优化: 从一个随机的W开始,然后迭代,每次都让它的损失值变得更小一点, 还是在尝试。
蒙眼山林猎人:蒙着眼睛回家(山底), 那就滚呗,哈哈。
办法2:随机本地试探
还是蒙着眼睛,超每个方向都试一下,如果感觉自己下降了,那就走那个方向啦。
看专家怎么说的:随机的扰动$\delta W , 只 有 当 ,只有当 ,只有当W+\delta$ W的损失值变低,我们才会更新损失。
嗯,大家都是凡人。
W = np.random.randn(10, 3073) * 0.001 # 随机 初始值:W
bestloss = float("inf")
for i in xrange(1000):
step_size = 0.0001
Wtry = W + np.random.randn(10, 3073) * step_size
loss = L(Xtr_cols, Ytr, Wtry)
if loss < bestloss:
W = Wtry
bestloss = loss
print 'iter %d loss is %f' % (i, bestloss)
这个方法得到21.4%的分类准确率。这个比策略一好,但是依然过于浪费计算资源,但是累还耗时。
方法3:跟随梯度—>望眼欲穿法
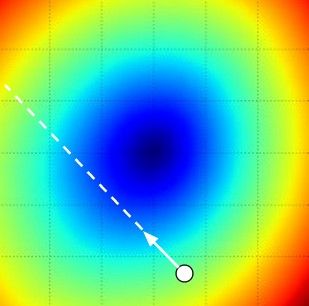
这次是睁开眼睛,你就往下看啊,越陡你下山越快,回家越快啊,小心别掉坑里啊。
数学专家:从数学上计算出最陡峭的方向。这个方向就是损失函数的梯度(gradient),这个方法就好比是感受我们脚下山体的倾斜程度,然后向着最陡峭的下降方向下山。
在一维函数中,斜率是函数在某一点的瞬时变化率. 梯度是函数的斜率的一般化表达,它不是一个值,而是一个向量。在输入空间中,梯度是各个维度的斜率组成的向量(或者称为导数derivatives)。对一维函数的求导公式如下:
d f ( x ) d x = lim h → 0 f ( x + h ) − f ( x ) h \displaystyle\frac{df(x)}{dx}=\lim_{h\to 0}\frac{f(x+h)-f(x)}{h} dxdf(x)=h→0limhf(x+h)−f(x)
当函数有多个参数的时候,我们称导数为偏导数。而梯度就是在每个维度上偏导数所形成的向量,多个参数的时候,我们称导数为偏导数.(我就叫它偏头痛)。哼~~~
4. 梯度计算
算梯度有两种方法:一个是缓慢的近似方法(数值梯度法),但实现相对简单。另一个方法(分析梯度法)计算迅速且精确,但是确实容易出错,且需要使用微分。
大白话就是: 一个是慢一点像老头一样一点一点的挪,一个是很快啊纵深一跃,容易骨折我真的没写错字,。
- 利用有限差值计算
下面代码输入函数f和向量x,计算f的梯度的通用函数,返回函数f在点x处的梯度。
def eval_numerical_gradient(f, x):
"""
a naive implementation of numerical gradient of f at x
简单的实现梯度
- f should be a function that takes a single argument
只有一个参数
- x is the point (numpy array) to evaluate the gradient at
计算梯度的位置
"""
# 原点计算函数值
fx = f(x) # evaluate function value at original point
grad = np.zeros(x.shape)
h = 0.00001
# iterate over all indexes in x
# 来啊, 挪啊(迭代啦~~)
it = np.nditer(x, flags=['multi_index'], op_flags=['readwrite'])
while not it.finished:
# evaluate function at x+h
# 挪了一步之后的海拔(x+h处的值)
ix = it.multi_index
old_value = x[ix]
x[ix] = old_value + h # increment by h(再挪一步,更新)
fxh = f(x) # evalute f(x + h)
# 记住你的海拔,太重要了
x[ix] = old_value # restore to previous value (very important!)
# compute the partial derivative
# 计算偏导数
grad[ix] = (fxh - fx) / h # the slope
it.iternext() # step to next dimension
return grad
概括一下回家过程:先对所有维度进行迭代,每个维度上会产生一个很小的变化h,通过观察函数值变化,计算函数在该维度上的偏导数,最后把所有的梯度存储在变量grad中。
**实践一下:**我们一般用 1e-5来表示h,反正就是很小啦,其实我们还可以用: [ f ( x + h ) − f ( x − h ) ] / 2 h [f(x+h)-f(x-h)]/2h [f(x+h)−f(x−h)]/2h更好,细节。
计算权重空间中的某些随机点上,CIFAR-10损失函数的梯度:
# 要使用上面的代码我们需要一个只有一个参数的函数(直译)
# 在这里参数就是权重,所以包含X_train和Y_train
def CIFAR10_loss_fun(W):
return L(X_train, Y_train, W)
W = np.random.rand(10, 3073) * 0.001 # 随机权重向量
df = eval_numerical_gradient(CIFAR10_loss_fun, W) # 得到梯度
梯度就是每个维度的斜率,以此来更新
loss_original = CIFAR10_loss_fun(W) # the original loss
print 'original loss: %f' % (loss_original, )
# lets see the effect of multiple step sizes
for step_size_log in [-10, -9, -8, -7, -6, -5,-4,-3,-2,-1]:
step_size = 10 ** step_size_log
W_new = W - step_size * df # new position in the weight space
loss_new = CIFAR10_loss_fun(W_new)
print 'for step size %f new loss: %f' % (step_size, loss_new)
# prints:
# original loss: 2.200718
# for step size 1.000000e-10 new loss: 2.200652
# for step size 1.000000e-09 new loss: 2.200057
# for step size 1.000000e-08 new loss: 2.194116
# for step size 1.000000e-07 new loss: 2.135493
# for step size 1.000000e-06 new loss: 1.647802
# for step size 1.000000e-05 new loss: 2.844355
# for step size 1.000000e-04 new loss: 25.558142
# for step size 1.000000e-03 new loss: 254.086573
# for step size 1.000000e-02 new loss: 2539.370888
# for step size 1.000000e-01 new loss: 25392.214036
梯度负方向更新:我们要下坡呢
步长: 这个不好选择啊,步子迈太大,扯淡啊。。。太小?回到家,老婆都和人跑了。
目前为止,时快时慢好像是最好的选择,并且这样效率很低哇。。。
5. 微分分析计算梯度
这里做了一个近似,因为定义来说是,h值越小越好啊,所以我们要时不时的看看自己是不是下降了(梯度检查),我们试试新办法。
用SVM的损失函数在某个数据点上的计算来举例:
L i = ∑ j ̸ = y i [ m a x ( 0 , w j T x i − w y i T x i + Δ ) ] L_i=\displaystyle\sum_{j\not =y_i}[max(0,w^T_jx_i-w^T_{y_i}x_i+\Delta)] Li=j̸=yi∑[max(0,wjTxi−wyiTxi+Δ)]
可以对函数进行微分。比如,对 w y i w_{y_i} wyi进行微分得到:
∇ w y i L i = − ( ∑ j ̸ = y i 1 ( w j T x i − w y i T x i + Δ > 0 ) ) x i \displaystyle\nabla_{w_{y_i}}L_i=-(\sum_{j\not=y_i}1(w^T_jx_i-w^T_{y_i}x_i+\Delta>0))x_i ∇wyiLi=−(j̸=yi∑1(wjTxi−wyiTxi+Δ>0))xi
其中1是一个示性函数,如果括号中条件为真,那么函数值为1,反之,则函数值为0. 这个可不是很简单的1喔!!!
公式唬人,代码实现的时候比较简单:只需计算对损失函数产生了贡献分类的数量,然后乘以 x i x_i xi就是梯度了。这个梯度只是对应正确分类的W的行向量的梯度,那些 j ̸ = y i j\not =y_i j̸=yi行的梯度是:
∇ w j L i = 1 ( w j T x i − w y i T x i + Δ > 0 ) x i \displaystyle\nabla_{w_j}L_i=1(w^T_jx_i-w^T_{y_i}x_i+\Delta>0)x_i ∇wjLi=1(wjTxi−wyiTxi+Δ>0)xi
6. 梯度下降
计算梯度,然后更新
# 普通梯度下降
while True:
weights_grad = evaluate_gradient(loss_fun, data, weights)
weights += - step_size * weights_grad # 梯度更新
梯度下降是对神经网络的损失函数最优化中最常用的方法, 我们一直跟着梯度走,直到结果不再变化.
7. 小批量数据梯度下降(Mini-batch GD):
批量干活效果好,因为:训练集中的数据都是相关的!
# 普通的小批量数据梯度下降
while True:
data_batch = sample_training_data(data, 256) # 256个数据
weights_grad = evaluate_gradient(loss_fun, data_batch, weights)
weights += - step_size * weights_grad # 参数更新
如果批量是一个呢?
聪明,就是随机梯度下降啦!(SGD)
小批量数据的大小是一个超参数,但是一般并不需要通过交叉验证来调参!开心,有木有!!!
tricks
使用比如32,64,128batch,因为在实际中许多向量化操作实现的时候,输入数据量是2的倍数,那么运算更快。
回到家了,总结时间,老婆让总结一下山林冒险
8. Summary
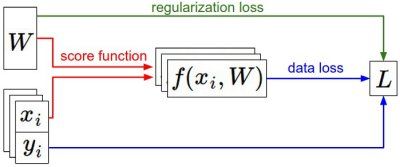
信息流图(路线图),数据集中的(x,y)是确定的,
权重:是随机开始(后期迁移学习就不是啦),
评分:评分函数计算出来存储在f中
损失:数据损失,和正则化损失。
数据损失计算的是:分类评分f和实际标签y之间的差异
正则化损失是:一个关于权重的函数( 其实一般就只计算这里啦 )
理解、计算损失函数关于权重的梯度,这个可是设计、训练和理解神经网络的核心能力。
下节课介绍反向传播!
转载和疑问声明
如果你有什么疑问或者想要转载,没有允许是不能转载的哈
赞赏一下能不能转?哈哈,联系我啊,我告诉你呢 ~~
欢迎联系我哈,我会给大家慢慢解答啦~~~怎么联系我? 笨啊~ ~~ 你留言也行
你关注微信公众号1.机器学习算法工程师:2.或者扫那个二维码,后台发送 “我要找朕”,联系我也行啦!

(爱心.gif) 么么哒 ~么么哒 ~么么哒
码字不易啊啊啊,如果你觉得本文有帮助,三毛也是爱!
我祝各位帅哥,和美女,你们永远十八岁,嗨嘿嘿~~~

