使用PLL估算器在无感的情况下,估计转子的角度和角速度
PLL估算器的工作原理基于反电动势的d分量在稳态下等于零,其框图如下:

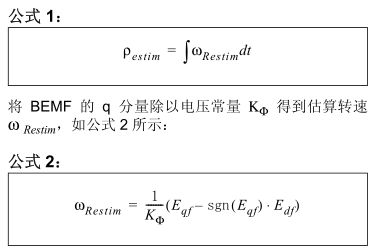
ΚΦ 表示电压常量,下面给出了电气转速计算中使用的归
一化 ΚΦ :

Eqf、Edf来自于对Ed、Eq的一阶滤波,滤波函数如下:
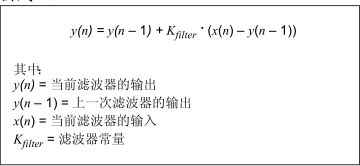
滤波器输出的直流值应该不含有由 ADC 采集引起的噪声或软件计算引入的高频变化。滤波器的调整取决于要滤波的值 (BEMF d-q 分量和电气转速)的变化速度,调整的结果是要保证足够的带宽,降低有用信号损失的可能性。对于 BEMF d-q 分量,有两种情形:
(1) 高速,在弱磁模式中,由于缺乏转矩瞬变或高加速斜率,变化缓慢;
(2) 低速,速度变化取决于电机的机械常量 (以及电机转轴上的负载)和基准速度升高或下降的斜率(取较快的那个值) 。
Ed、Eq来自于Eα、Eβ的Park变换,如下:

将得到的 BEMF Eα 和 Eβ 值通过 Park 变换转换到转子磁通的旋转参考坐标系, 得到Ed 和Eq 值。在 Park 变换中使用的角度 ρestim ,是估算器前一执行环节中计算得到的。基于Ed等于零,使用一阶滤波器对BEMF 的 d-q 值进行滤波,并将滤波后的值代入估算器的主程序。
Eα、Eβ如下:
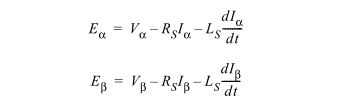
电流对时间的导数会对软件造成干扰。因此,估算器的每次执行周期中都引入了电流变化的极限值,该值必须小于估算器每次执行周期的最大电流变化值,每当发生 PWM 中断都将执行该周期。
Vα 和 V β 是在 FOC 的前一计算环节中得到的结果,它们不仅在控制的前一步骤中馈送给空间向量调制(Space Vector Modulation,SVM)电路,而且在当前步骤中馈送给估算器电路。 I α 和 I β 是相电流经Clarke 变换后得到的,在估算器的每个工作环节中都将被读取。
定子电感(LS )和电阻(RS)经过了归一化,以便简化计算并满足软件表示要求:

参考:MICROCHIP AN1292 利用 PLL估算器和弱磁技术 (FW)实现永磁同步电机 (PMSM )的无传感器磁场定向控制 (FOC )