RT-Thread 笔记(3):RT-Thread 添加一个串口设备
文章目录
- 一、添加一个串口设备
- 1. 确定IO口
- 2. 编辑 board.h
- 2.1 打开board.h
- 2.2 添加代码
- 2.3 查看串口设备
- 3. 程序设计
- 3.1 官方示例程序
- 3.2 程序的使用
- 4. 测试
一、添加一个串口设备
本文简记了如何新增和使用串口2设备,更多请参考官方文档:
https://www.rt-thread.org/document/site/programming-manual/device/uart/uart/#_11
RTT 中外设作为设备存在,在建立工程的时候,一般串口1被作为系统默认串口,假如现在有一个串口模块需要和单片机通讯,用户若需要串口1作为调试口,则可以再初始化一个串口。在目前的RTT版本中,可以通过定义board.h中相关的宏定义来添加串口设备。
添加一个串口设备需要以下几个步骤:
- 确定IO口
- 编辑
board.h宏定义 - 设计程序
- 测试
1. 确定IO口
以串口2为例,用户需要串口2的Tx和Rx在哪一个引脚,通常需要查看数据手册,也可以通过cubeMx来查看:
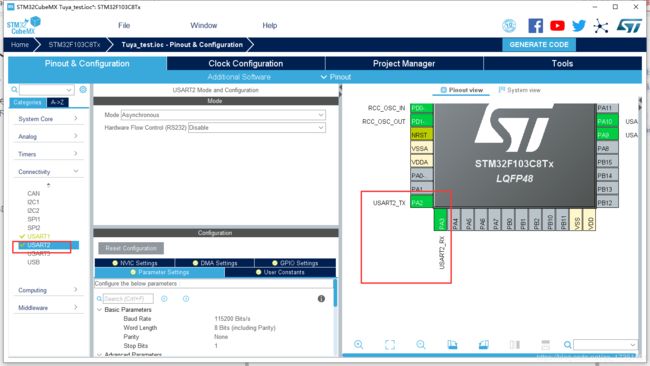
通过使能串口2来查看相关的引脚。
2. 编辑 board.h
2.1 打开board.h
如果不清楚 borad.h 位置,可以直接在工程.c文件中输入#include "board.h",按住 Ctrl 点击该头文件即可跳转到 board.h 文件中:
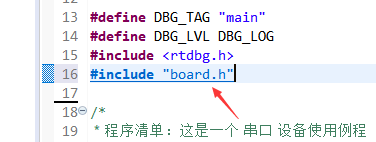
(按住Ctrl 实现头文件跳转)
2.2 添加代码
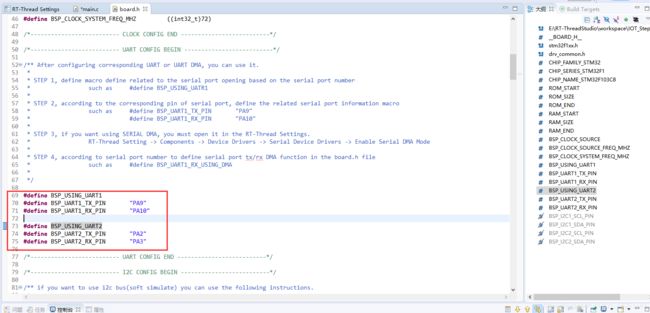
在 board.h 中添加代码如下:
#define BSP_USING_UART2 //使用串口2
#define BSP_UART2_TX_PIN "PA2" //串口2的Tx脚为 PA2
#define BSP_UART2_RX_PIN "PA3" //串口2的Rx脚为 PA3
为文件可读性,建议添加在串口1相关程序下:
2.3 查看串口设备
编辑好 board.h 以后,保存编译并下载程序,此时可以通过终端来查看是否添加的串口2。具体操作:在中断中输入指令:list_device:
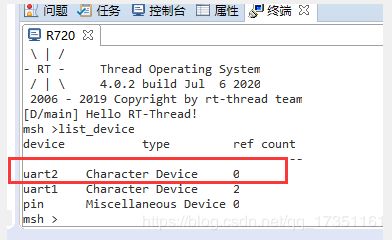
这里的终端其实就是一个串口助手,它打开的是默认的串口1。可以发现,uart2 为串口2设备的名字,它已经注册到系统中。
3. 程序设计
3.1 官方示例程序
添加完成串口2设备以后,即完成了串口2外设的初始化,以下是官方示例程序:
/*
* 程序清单:这是一个 串口 设备使用例程
* 例程导出了 uart_sample 命令到控制终端
* 命令调用格式:uart_sample uart2
* 命令解释:命令第二个参数是要使用的串口设备名称,为空则使用默认的串口设备
* 程序功能:通过串口输出字符串"hello RT-Thread!",然后错位输出输入的字符
*/
#include 这部分创建一个新的进程,打印一次 hello RT-Thread! 并将收到的数据错位打出来。
3.2 程序的使用
使用官方程序只需将程序复制到main,c中,然后调用uart_sample()即可,其实第一个参数为参数的个数,第二个参数为参数序列,本文第一个参数填入数值1,第二个参数填入字符串“uart2”:
/*
* Copyright (c) 2006-2020, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2020-07-06 RT-Thread first version
*/
#include 4. 测试
将编辑好的程序编译下载到STM32中,将USB转串口模块连接STM32,打开串口查看调试信息:
注意到串口的配置,本文并为设置串口的波特率停止位等,所以这些就为当前系统版本,创建串口设备的默认设置,可以观察到,单片机复位时:串口助手输出“hello RT-Thread ”字符串,当串口助手发送“ABC”和“123”时候,分别输出“BCD”和"234",程序运行正常。