ORBSLAM2编译运行数据集(亲测可用)
ORBSLAM2编译运行数据集(亲测可用)
实验环境ubuntu 14.04+ros indigo
安装indigo
参考http://wiki.ros.org/cn/indigo/Installation/Ubuntu
安装ORBSLAM2依赖项
•安装 g++11
$sudo apt-get install gcc g++•安装 Pangolin依赖项
$ sudo apt-get install libglew-dev #安装Glew
$ sudo apt-get install cmake #安装CMake
$ sudo apt-get install libboost-dev libboost-thread-dev libboost-filesystem-dev #安装Boost
$ sudo apt-get install libpython2.7-dev #安装Python2'Python3•下载、编译、安装Pangolin:
$ git clone https://github.com/stevenlovegrove/Pangolin.git
$ cd Pangolin
$ mkdir build
$ cd build
$ cmake -DCPP11_NO_BOOST=1 ..
$ make
$ sudo make install•安装OpenCV
ORBSLAM2提供了对opencv2和3的支持,这里使用opencv2,简单方便
$sudo apt-get update
$sudo apt-get install libcv-dev•安装Eigen
$sudo apt-get install libeigen3-dev•BLAS and LAPACK
$ sudo apt-get install libblas-dev
$ sudo apt-get install liblapack-dev•DBoW2和g2o(包含在第三方文件夹中)
•ROS(可选)
2构建ORBSLAM2库和实例
git clone https://github.com/raulmur/ORB_SLAM2.git ORB_SLAM2
cd ORB_SLAM2
chmod +x build.sh
./build.sh生成的libORB_SLAM2.so位于lib目录下,可执行程序mono_tum, mono_kitti, rgbd_tum, stereo_kitti, mono_euroc and stereo_euroc位于Examples目录下
3 运行数据集
1.TUM数据集
1.从http://vision.in.tum.de/data/datasets/rgbd-dataset/download下载序列并解压缩。
2.使用python脚本associate.py关联 RGB图像和深度图像。我们已经为Example / RGB-D / associations /中的一些序列提供了关联。您可以生成自己的关联文件执行:
python associate.py PATH_TO_SEQUENCE/rgb.txt PATH_TO_SEQUENCE/depth.txt > associations.txt3.执行以下命令。分别TUMX.yaml为freiburg1,freiburg2和freiburg3序列改为TUM1.yaml,TUM2.yaml或TUM3.yaml。更改PATH_TO_SEQUENCE_FOLDER为未压缩的序列文件夹。更改ASSOCIATIONS_FILE到相应关联文件的路径。
./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUMX.yaml PATH_TO_SEQUENCE_FOLDER ASSOCIATIONS_FILE4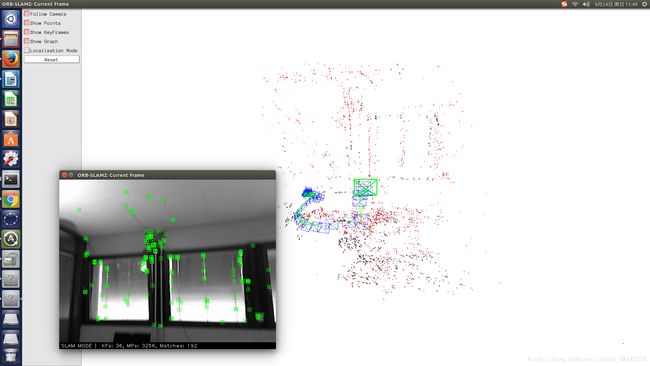
单目数据集示例
1.从http://vision.in.tum.de/data/datasets/rgbd-dataset/download下载序列并解压缩。
2.执行以下命令。分别TUMX.yaml为freiburg1,freiburg2和freiburg3序列改为TUM1.yaml,TUM2.yaml或TUM3.yaml。更改PATH_TO_SEQUENCE_FOLDER为未压缩的序列文件夹。
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUMX.yaml PATH_TO_SEQUENCE_FOLDER
参考:
http://www.cnblogs.com/xzd1575/p/5555523.html
https://github.com/raulmur/ORB_SLAM2