ORB-SLAM2的源码阅读(一):系统的整体构建
春节后又要开工啦,加油ヾ(◍°∇°◍)ノ゙
ORB-SLAM2在SLAM界算的上是火遍大江南北,无数更新的版本在github上发布,这么厉害的代码怎么样也得拜读一下。原谅我的脑力有限,一次性是没法读完这整套代码的,当然在当中也会有不理解的地方或者理解错误的地方,如果理解有误,还请批评指正。
ORB-SLAM2源自于ORB-SLAM,为什么有名?因为完善,集合了单目,双目,RGB-D多种模型。更重要的一点是人家开源了,安装很方便,并且做了运行各种大数据库的demo,基本上只要编译通过,什么TUM,KITTI , EuRoc都可以很快的使用,并且心里感觉就是,哇!SLAM很酷炫。
但是话说回来,一般很酷炫的东西要想吃透理解就是一件不是很酷炫的事儿了,可能还有点痛苦,毕竟看代码不像看小说书,不仅逻辑思维要清晰,还要明白一行行代码后的具体意义。一句话,还是得耐住性子才行。
ORB-SLAM2的代码量不小,先要理解大概的结构,在进行细节上的理解。下面的代码来自ORB-SLAM2。这是基本上构建出了SLAM的基本框架。
#ifndef SYSTEM_H
#define SYSTEM_H
#include#include "System.h"
#include "Converter.h"
#include (NULL)), mbReset(false),mbActivateLocalizationMode(false),
mbDeactivateLocalizationMode(false)
{
// Output welcome message
cout << endl <<
"ORB-SLAM2 Copyright (C) 2014-2016 Raul Mur-Artal, University of Zaragoza." << endl <<
"This program comes with ABSOLUTELY NO WARRANTY;" << endl <<
"This is free software, and you are welcome to redistribute it" << endl <<
"under certain conditions. See LICENSE.txt." << endl << endl;
cout << "Input sensor was set to: ";
//系统的完整之处在于此,单目,立体,深度非常完备
if(mSensor==MONOCULAR)
cout << "Monocular" << endl;
else if(mSensor==STEREO)
cout << "Stereo" << endl;
else if(mSensor==RGBD)
cout << "RGB-D" << endl;
//Check settings file
//读取对应的参数设定的文件,如果运行过ORB-SLAM2就会知道对应的就是相机内参、帧率、基线(双目)
//深度阈值,对应ORB Extractor的参数设定,还有Viewer线程的参数设定,XXX.yaml这种文件类型
cv::FileStorage fsSettings(strSettingsFile.c_str(), cv::FileStorage::READ);
if(!fsSettings.isOpened())
{
cerr << "Failed to open settings file at: " << strSettingsFile << endl;
exit(-1);
}
//Load ORB Vocabulary
//下载对应的词袋模型,对应的是.txt文件类型
cout << endl << "Loading ORB Vocabulary. This could take a while..." << endl;
mpVocabulary = new ORBVocabulary();
bool bVocLoad = mpVocabulary->loadFromTextFile(strVocFile);
if(!bVocLoad)
{
cerr << "Wrong path to vocabulary. " << endl;
cerr << "Falied to open at: " << strVocFile << endl;
exit(-1);
}
cout << "Vocabulary loaded!" << endl << endl;
//Create KeyFrame Database
mpKeyFrameDatabase = new KeyFrameDatabase(*mpVocabulary);
//Create the Map
mpMap = new Map();
//Create Drawers. These are used by the Viewer
mpFrameDrawer = new FrameDrawer(mpMap);
mpMapDrawer = new MapDrawer(mpMap, strSettingsFile);
//Initialize the Tracking thread
//(it will live in the main thread of execution, the one that called this constructor)
//初始化Tracking线程
mpTracker = new Tracking(this, mpVocabulary, mpFrameDrawer, mpMapDrawer,
mpMap, mpKeyFrameDatabase, strSettingsFile, mSensor);
//Initialize the Local Mapping thread and launch
//初始化Local Mapping 线程
mpLocalMapper = new LocalMapping(mpMap, mSensor==MONOCULAR);
mptLocalMapping = new thread(&ORB_SLAM2::LocalMapping::Run,mpLocalMapper);
//Initialize the Loop Closing thread and launch
//初始化闭环检测线程
mpLoopCloser = new LoopClosing(mpMap, mpKeyFrameDatabase, mpVocabulary, mSensor!=MONOCULAR);
mptLoopClosing = new thread(&ORB_SLAM2::LoopClosing::Run, mpLoopCloser);
//Initialize the Viewer thread and launch
//初始化可视化线程
if(bUseViewer)
{
mpViewer = new Viewer(this, mpFrameDrawer,mpMapDrawer,mpTracker,strSettingsFile);
mptViewer = new thread(&Viewer::Run, mpViewer);
mpTracker->SetViewer(mpViewer);
}
//Set pointers between threads
mpTracker->SetLocalMapper(mpLocalMapper);
mpTracker->SetLoopClosing(mpLoopCloser);
mpLocalMapper->SetTracker(mpTracker);
mpLocalMapper->SetLoopCloser(mpLoopCloser);
mpLoopCloser->SetTracker(mpTracker);
mpLoopCloser->SetLocalMapper(mpLocalMapper);
}
//运行的系统设定为双目
cv::Mat System::TrackStereo(const cv::Mat &imLeft, const cv::Mat &imRight, const double ×tamp)
{
if(mSensor!=STEREO)
{
cerr << "ERROR: you called TrackStereo but input sensor was not set to STEREO." << endl;
exit(-1);
}
// Check mode change
{
unique_lock lock(mMutexMode);
if(mbActivateLocalizationMode)
{
mpLocalMapper->RequestStop();
// Wait until Local Mapping has effectively stopped
while(!mpLocalMapper->isStopped())
{
usleep(1000);
}
mpTracker->InformOnlyTracking(true);
mbActivateLocalizationMode = false;
}
if(mbDeactivateLocalizationMode)
{
mpTracker->InformOnlyTracking(false);
mpLocalMapper->Release();
mbDeactivateLocalizationMode = false;
}
}
// Check reset
{
unique_lock lock(mMutexReset);
if(mbReset)
{
mpTracker->Reset();
mbReset = false;
}
}
cv::Mat Tcw = mpTracker->GrabImageStereo(imLeft,imRight,timestamp);
unique_lock lock2(mMutexState);
mTrackingState = mpTracker->mState;
mTrackedMapPoints = mpTracker->mCurrentFrame.mvpMapPoints;
mTrackedKeyPointsUn = mpTracker->mCurrentFrame.mvKeysUn;
return Tcw;
}
//运行系统设定为深度相机
cv::Mat System::TrackRGBD(const cv::Mat &im, const cv::Mat &depthmap, const double ×tamp)
{
if(mSensor!=RGBD)
{
cerr << "ERROR: you called TrackRGBD but input sensor was not set to RGBD." << endl;
exit(-1);
}
// Check mode change
{
unique_lock lock(mMutexMode);
if(mbActivateLocalizationMode)
{
mpLocalMapper->RequestStop();
// Wait until Local Mapping has effectively stopped
while(!mpLocalMapper->isStopped())
{
usleep(1000);
}
mpTracker->InformOnlyTracking(true);
mbActivateLocalizationMode = false;
}
if(mbDeactivateLocalizationMode)
{
mpTracker->InformOnlyTracking(false);
mpLocalMapper->Release();
mbDeactivateLocalizationMode = false;
}
}
// Check reset
{
unique_lock lock(mMutexReset);
if(mbReset)
{
mpTracker->Reset();
mbReset = false;
}
}
cv::Mat Tcw = mpTracker->GrabImageRGBD(im,depthmap,timestamp);
unique_lock lock2(mMutexState);
mTrackingState = mpTracker->mState;
mTrackedMapPoints = mpTracker->mCurrentFrame.mvpMapPoints;
mTrackedKeyPointsUn = mpTracker->mCurrentFrame.mvKeysUn;
return Tcw;
}
//运行系统设定为单目
cv::Mat System::TrackMonocular(const cv::Mat &im, const double ×tamp)
{
if(mSensor!=MONOCULAR)
{
cerr << "ERROR: you called TrackMonocular but input sensor was not set to Monocular." << endl;
exit(-1);
}
// Check mode change
{
unique_lock lock(mMutexMode);
if(mbActivateLocalizationMode)
{
mpLocalMapper->RequestStop();
// Wait until Local Mapping has effectively stopped
while(!mpLocalMapper->isStopped())
{
usleep(1000);
}
mpTracker->InformOnlyTracking(true);
mbActivateLocalizationMode = false;
}
if(mbDeactivateLocalizationMode)
{
mpTracker->InformOnlyTracking(false);
mpLocalMapper->Release();
mbDeactivateLocalizationMode = false;
}
}
// Check reset
{
unique_lock lock(mMutexReset);
if(mbReset)
{
mpTracker->Reset();
mbReset = false;
}
}
cv::Mat Tcw = mpTracker->GrabImageMonocular(im,timestamp);
unique_lock lock2(mMutexState);
mTrackingState = mpTracker->mState;
mTrackedMapPoints = mpTracker->mCurrentFrame.mvpMapPoints;
mTrackedKeyPointsUn = mpTracker->mCurrentFrame.mvKeysUn;
return Tcw;
}
//激活定位模块
void System::ActivateLocalizationMode()
{
unique_lock lock(mMutexMode);
mbActivateLocalizationMode = true;
}
//失活定位模块
void System::DeactivateLocalizationMode()
{
unique_lock lock(mMutexMode);
mbDeactivateLocalizationMode = true;
}
//地图是否进行修改
bool System::MapChanged()
{
static int n=0;
int curn = mpMap->GetLastBigChangeIdx();
if(nreturn true;
}
else
return false;
}
//重置系统
void System::Reset()
{
unique_lock lock(mMutexReset);
mbReset = true;
}
//关闭整个系统
void System::Shutdown()
{
mpLocalMapper->RequestFinish();
mpLoopCloser->RequestFinish();
if(mpViewer)
{
mpViewer->RequestFinish();
while(!mpViewer->isFinished())
usleep(5000);
}
// Wait until all thread have effectively stopped
while(!mpLocalMapper->isFinished() || !mpLoopCloser->isFinished() || mpLoopCloser->isRunningGBA())
{
usleep(5000);
}
if(mpViewer)
pangolin::BindToContext("ORB-SLAM2: Map Viewer");
}
//如果运行的是TUM数据集,保存其轨迹
void System::SaveTrajectoryTUM(const string &filename)
{
cout << endl << "Saving camera trajectory to " << filename << " ..." << endl;
if(mSensor==MONOCULAR)
{
cerr << "ERROR: SaveTrajectoryTUM cannot be used for monocular." << endl;
return;
}
vector// pKF->SetPose(pKF->GetPose()*Two);
if(pKF->isBad())
continue;
cv::Mat R = pKF->GetRotation().t();
vector<float> q = Converter::toQuaternion(R);
cv::Mat t = pKF->GetCameraCenter();
f << setprecision(6) << pKF->mTimeStamp << setprecision(7) << " " << t.at<float>(0) << " " << t.at<float>(1) << " " << t.at<float>(2)
<< " " << q[0] << " " << q[1] << " " << q[2] << " " << q[3] << endl;
}
f.close();
cout << endl << "trajectory saved!" << endl;
}
//如果运行的是KITTI数据集,保存其轨迹
void System::SaveTrajectoryKITTI(const string &filename)
{
cout << endl << "Saving camera trajectory to " << filename << " ..." << endl;
if(mSensor==MONOCULAR)
{
cerr << "ERROR: SaveTrajectoryKITTI cannot be used for monocular." << endl;
return;
}
vector lock(mMutexState);
return mTrackingState;
}
vector lock(mMutexState);
return mTrackedMapPoints;
}
vector lock(mMutexState);
return mTrackedKeyPointsUn;
}
} //namespace ORB_SLAM
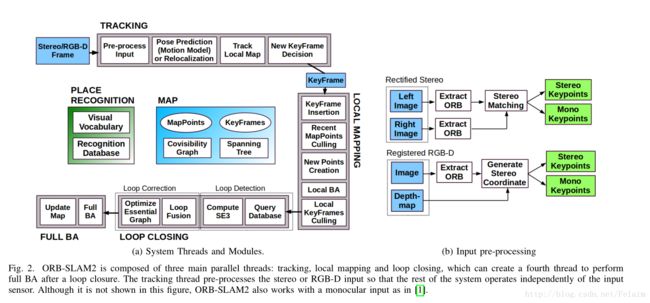
从上面的代码可以看出其实针对不同的模型,使用的接口还是有差异的。从代码中可以看出:
(1)主线程:Tracking线程就是在主线程上 这一部分主要工作是从图像中提取ORB特征,根据上一帧进行姿态估计,或者进行通过全局重定位初始化位姿,然后跟踪已经重建的局部地图,优化位姿,再根据一些规则确定新的关键帧。
(2)Local mappng线程 这一部分主要完成局部地图构建。包括对关键帧的插入,验证最近生成的地图点并进行筛选,然后生成新的地图点,使用局部捆集调整(Local BA),最后再对插入的关键帧进行筛选,去除多余的关键帧。
(3)Loop closing线程 这一部分主要分为两个过程,分别是闭环探测和闭环校正。闭环检测先使用WOB进行探测,然后通过Sim3算法计算相似变换。闭环校正,主要是闭环融合和Essential Graph的图优化。
(4)Viewer线程 对估计的位姿和特征点进行可视化显示
参考链接:
http://blog.csdn.net/u010128736/article/details/53157605