流形上的预积分
文章目录
- 一、预积分的由来
- 二、相关理论
- 三、初步
- a.黎曼几何概念
- b.SO(3)中不确定性的描述
- c.流形上的高斯牛顿法
- 四、最大后验视觉惯导状态估计
- 五、IMU模型和运动积分
- 六、流形上的IMU预积分
- A. *Preintegrated IMU Measurements*
- (1) Δ R i j \Delta {\bf R}_{ij} ΔRij项
- (2) Δ v i j \Delta {\bf v}_{ij} Δvij项
- (3) Δ p i j \Delta{\bf p}_{ij} Δpij项
- B. *Noise Propagation*
- B1. _Iterative Noise Propagation_
- C. _Incorporating Bias Updates_
- D. _Preintegrated IMU Factors_
- D1. _Jacobians of Residual Errors_
- 七、无结构化视觉因子
参考文献
- https://blog.csdn.net/qq_26682225/article/details/72649858
- On-Manifold Preintegration for Real-TimeVisual-Inertial Odometry
- 【泡泡机器人原创专栏】IMU预积分总结与公式推导(一)~(四)
一、预积分的由来

来协调imu数据和图像之间的关系。通过重新参数化[^1]来把关键帧之间的IMU数据积分成相对运动的约束,避免初始条件变化 [^2]造成的重复积分, 预积分的值并不是真实的测量值.
预积分与因子图结合, 增量式因子图
二、相关理论
- 基于滤波的方法能够快速的推断当前的状态量,但是精度会随着线性化误差的累积而恶化。
- 基于优化的完全平滑方法精度高一些,但计算量很大。
- 固定滞后的平滑方法(滑动窗)是一个折中。
采用了structless model(边际化),这样可以不用延迟视觉信息的处理,同时可以多次线性化视觉测量模型。具体代码的实现整合在了gtsam4.0中
- 参加估计的pose number:
full smoothers: 所有的pose.
fixed-lag: 滑动窗口内的pose
filter: 最近的pose
- 代表不确定性的方法:
EKF: 协方差矩阵
信息滤波[^3]和smoothers: 信息矩阵
- 测量模型被线性化的次数:
standard EKF :1
smoothing appoach : 多次
fixed-lag和filter的方式相比对外点有更强的鲁棒性,fixed-lag在边际化的会使H矩阵变得稠密,为了保持稀疏性,需要丢掉一些测量点。此外两者都需要采用first estimate jacobian来线性化,来保持系统能观性不变,否则会引入错误的信息。
- SLAM中的First-Estimates Jacobian。
对于一个系统,Observability性质(能观性),决定了这个系统在进行状态估计时,哪些自由度是可以被估计出来的。并且其能观性是不受估计方法(Closed-form 方法、EKF、或者Nonlinear Optimization等等)改变的。能观性通过Observability Matrix(能观性矩阵)体现,系统Unobservable的状态维数是这个矩阵零空间的维数。
比如,单目纯视觉SLAM里,尺度和6DOF的绝对位姿——总共7DOF,都是无法被估计。可以通过固定某一帧来确定6个自由度,但是尺度无法确定。
再比如Visual-Inertial系统里,在运动激励充分(足够多轴向有足够大的加速度/角速度)的情况下,尺度、滚转/俯仰角是可以被估计的,只剩下绝对偏航角、绝对位置无法获得,也就是说对于Visual-Inertial系统在合适的运动模式下Unobservable的维数是4。磁力计可以确定偏航角,加上固定某一帧可以确定相对位置。
不同的线性化状态点计算得到的系数矩阵(雅克比矩阵)会导致Observability Matrix(能观性矩阵)的零空间维数出现不一致(inconsistency),导致自由度不一样出现偏差。为了修正这个问题,提出了First Estimate Jacobian。用相同的状态点进行线性化计算就不会有这个问题了,具体来说,位姿采用propagated值而非updated值,landmark使用第一次估计值。First Estimate就是这个直观含义,即采用estimation from the first time。
理解不够透彻:可参考文献:
[1] Kelly, J., & Sukhatme, G. S. (2011). Visual-inertial sensor fusion: Localization, mapping and sensor-to-sensor self-calibration. The International Journal of Robotics Research, 30(1), 56-79
[3] Strasdat, H., Montiel, J. M. M., & Davison, A. J. (2010). Scale drift-aware large scale monocular SLAM. Robotics: Science and Systems VI.
[4] Huang, G. P., Mourikis, A. I., & Roumeliotis, S. I. (2009). A first-estimates Jacobian EKF for improving SLAM consistency. In Experimental Robotics(pp. 373-382). Springer Berlin Heidelberg.作者:
[8] Hermann, R., & Krener, A. J. (1977). Nonlinear controllability and observability. IEEE Transactions on automatic control, 22(5), 728-740.
预积分理论的贡献
- 使得测量与绝对位姿解耦
- 利用重力使得俯仰和横滚变得可观
- 与视觉结合使得bias可观
三、初步
a.黎曼几何概念
SO3群定义:
S O ( 3 ) = { R ∈ R : R T R = I , d e t ( R ) = 1 } . { SO(3) =\lbrace {\bf R} \in {\Bbb R} :{\bf R^TR} = {\bf I}, det({\bf R}) = 1 \rbrace. } SO(3)={R∈R:RTR=I,det(R)=1}.
他也代表着一个光滑的流形(manifold), 流形的切空间(tan)表示为李代数 S O ( 3 ) \mathcal SO(3) SO(3), 它与一个3维向量的3*3的反对称矩阵(向量加^表示)一致.
ω ∧ = [ ω 1 ω 2 ω 3 ] ∧ = [ 0 − ω 3 ω 2 ω 3 0 − ω 1 − ω 2 ω 1 0 ] ∈ S O ( 3 ) . {\omega ^\wedge = \begin{bmatrix} \omega_1 \\ \omega_2 \\ \omega_3 \end{bmatrix}^\wedge = \begin{bmatrix} 0 && -\omega_3 && \omega_2 \\ \omega_3 && 0 && -\omega_1 \\ -\omega_2 && \omega_1 && 0 \end{bmatrix} \in \mathcal{SO} (3)}. ω∧=⎣⎡ω1ω2ω3⎦⎤∧=⎣⎡0ω3−ω2−ω30ω1ω2−ω10⎦⎤∈SO(3).
他们之间的指数映射和对数映射如下:
E x p : R 3 → S O ( 3 ) ; ϕ → e x p ( ϕ ∧ ) L o g : S O ( 3 ) → R 3 ; R → l o g ( R ) \begin{aligned} Exp \ &{:}\quad \Bbb{R}^3 &{\rightarrow} \quad & SO(3) &\ ; &\quad\bf{\phi} &\rightarrow \quad &exp(\phi^\wedge) \\ Log \ &{:}\quad SO(3) &{\rightarrow} \quad & \Bbb{R}^3 &\ ; &\quad\bf{R} &\rightarrow \quad &log( {\bf R} ) \end{aligned} Exp Log :R3:SO(3)→→SO(3)R3 ; ;ϕR→→exp(ϕ∧)log(R)
E x p Exp Exp映射:
E x p ( ϕ ) = I + s i n ( ∥ ϕ ∥ ) ∥ ϕ ∥ ϕ ∧ + 1 − c o s ( ∥ ϕ ∥ ) ∥ ϕ ∥ 2 ( ϕ ∧ ) 2 Exp({\mathbf \phi})=I+\frac{sin(\|{\mathbf \phi}\|)}{\|{\mathbf \phi}\|}{\mathbf \phi}^\wedge+\frac{1-cos(\|{\mathbf \phi}\|)}{\|{\mathbf \phi}\|^2}({\bf \phi}^\wedge)^2 Exp(ϕ)=I+∥ϕ∥sin(∥ϕ∥)ϕ∧+∥ϕ∥21−cos(∥ϕ∥)(ϕ∧)2
L o g Log Log映射:
l o g ( R ) = ϕ ⋅ ( R − R T ) 2 s i n ( ϕ ) , 其 中 旋 转 角 ϕ = c o s − 1 ( t r ( R ) − 1 2 ) log(R)=\frac{\phi \cdot ({\bf R-R}^T)}{2sin(\phi)} ,\quad 其中 \quad旋转角 \phi=cos^{-1}(\frac{tr(R)-1}{2}) log(R)=2sin(ϕ)ϕ⋅(R−RT),其中旋转角ϕ=cos−1(2tr(R)−1)
李群的乘法并不符合正常指数的运算法则,即不等于李代数的和,因此当变化量是微小量时使用BCH公式近似模型得到一阶近似:
E x p ( ϕ + δ ϕ ) ≈ E x p ( ϕ ) E x p ( J r ( ϕ ) δ ϕ ) Exp({\bf\phi}\ +\ \delta{\bf\phi} ) \approx Exp({\bf\phi}) \, Exp(J_r(\phi)\delta{\bf\phi}) Exp(ϕ + δϕ)≈Exp(ϕ)Exp(Jr(ϕ)δϕ)
其中
J r ( ϕ ) = I − 1 − cos ( ∥ ϕ ∥ ) ∥ ϕ ∥ 2 ϕ ∧ + ∣ ∣ ϕ ∣ ∣ − sin ( ∣ ∣ ϕ ∣ ∣ ) ∣ ∣ ϕ ∣ ∣ 3 ( ϕ ∧ ) 2 J_r(\phi) = {\bf I} - \frac {1 - \cos(\parallel\phi\parallel)} {\parallel\phi\parallel ^2}\phi^\wedge \ + \ \frac {\mid\mid\phi\mid\mid -\sin(\mid\mid\phi\mid\mid )}{\mid\mid\phi\mid\mid ^3}(\phi^\wedge)^2 Jr(ϕ)=I−∥ϕ∥21−cos(∥ϕ∥)ϕ∧ + ∣∣ϕ∣∣3∣∣ϕ∣∣−sin(∣∣ϕ∣∣)(ϕ∧)2
同理反之,乘法变加法也成立。
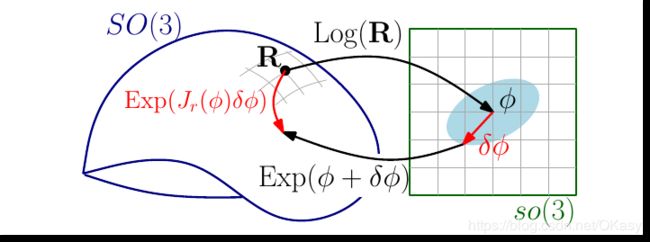
图中, J r ( ϕ ) J_r(\phi) Jr(ϕ)将切线空间中的累加增量与左侧的乘法增量相关联。
R E x p ( ϕ ) R T = e x p ( R ϕ ∧ R T ) = E x p ( R ϕ ) R \ Exp({\bf\phi}) \ R^T\ = \ exp(R{\bf\phi}^\wedge R^T) \ = \ Exp(R{\bf\phi}) R Exp(ϕ) RT = exp(Rϕ∧RT) = Exp(Rϕ)
⟺ E x p ( ϕ ) R = R E x p ( R T ϕ ) . \iff Exp({\bf\phi}) \ R \ = \ R Exp(R^T{\bf\phi}). ⟺Exp(ϕ) R = RExp(RTϕ).
注意: 这里的 E x p Exp Exp和 e x p exp exp是有区别的,大写的不需要^这个。
b.SO(3)中不确定性的描述
由前面知识可知:
R ~ = R E x p ( ϵ ) , ϵ ∼ N ( 0 , Σ ) \tilde{R} = R\ Exp(\epsilon), \qquad \epsilon \sim N(0,\ \Sigma) R~=R Exp(ϵ),ϵ∼N(0, Σ)
其中, R R R是不包含噪声的, ϵ \epsilon ϵ是一个正态分布的小扰动.
我们对高斯扰动(3维高斯公式)进行积分:
∫ R 3 p ( ϵ ) d ϵ = ∫ R 3 α e − 1 2 ∥ ϵ ∥ Σ 2 d ϵ = 1 , \int_{\R^3} p(\epsilon)\ d\epsilon = \int_{\R^3} \alpha e^{-\frac{1}{2}\parallel\epsilon\parallel^2_\Sigma }d \epsilon=1, ∫R3p(ϵ) dϵ=∫R3αe−21∥ϵ∥Σ2dϵ=1,
其中 α = 1 / ( 2 π ) 3 d e t ( Σ ) \alpha = 1/ \sqrt{(2\pi)^3 det(\Sigma)} α=1/(2π)3det(Σ), ∥ ϵ ∥ Σ 2 = ϵ T Σ − 1 ϵ \parallel \epsilon\parallel^2_\Sigma = \epsilon^T\Sigma^{-1}\epsilon ∥ϵ∥Σ2=ϵTΣ−1ϵ是马氏距离的平方.
当 ∥ ϵ ∥ < π \parallel\epsilon\parallel < \pi ∥ϵ∥<π时, 根据式(8)可以推出 ϵ = L o g ( R − 1 R ~ ) \epsilon = Log(R^{-1}\tilde{R}) ϵ=Log(R−1R~)代入式(9)
∫ S O ( 3 ) β ( R ~ ) e − 1 2 ∥ L o g ( R − 1 R ~ ) ∥ Σ 2 d R ~ = 1 , \int_{SO(3)} \beta(\tilde{R}) \ e^{-\frac{1}{2}\parallel Log(R^{-1}\tilde{R})\parallel^2_\Sigma }d \tilde{R} = 1, ∫SO(3)β(R~) e−21∥Log(R−1R~)∥Σ2dR~=1,
β ( R ~ ) \beta(\tilde{R}) β(R~)是一个归一化因子, 他等于 β ( R ~ ) = α / ∣ d e t ( J ( R ~ ) ) ∣ \beta(\tilde{R})=\alpha/\mid det(J(\tilde{R}))\mid β(R~)=α/∣det(J(R~))∣, 由于积分变量的变化 J ( R ~ ) ≐ J r ( L o g ( R − 1 R ~ ) ) J(\tilde{R})\doteq J_r(Log(R^{-1}\tilde{R})) J(R~)≐Jr(Log(R−1R~))
关于积分变量的推导:
δ R = L o g ( E x p ( ϵ + δ ϵ ) E x p ( ϵ ) ) = L o g ( E x p ( ϵ ) E x p ( J r δ ϵ ) E x p ( ϵ ) ) = J r δ ϵ \begin{aligned} \delta R&= Log( \frac {Exp(\epsilon+\delta\epsilon)}{Exp(\epsilon)}) \\ &=Log(\frac {Exp(\epsilon) Exp(J_r\delta\epsilon)}{Exp(\epsilon)}) \\ &=J_r\delta\epsilon \end{aligned} δR=Log(Exp(ϵ)Exp(ϵ+δϵ))=Log(Exp(ϵ)Exp(ϵ)Exp(Jrδϵ))=Jrδϵ
在SO(3)上的高斯扰动:
p ( R ~ ) = β ( R ~ ) e − 1 2 ∥ L o g ( R − 1 R ~ ) ∥ Σ 2 p(\tilde{R}) = \beta(\tilde{R}) \ e^{-\frac{1}{2}\parallel Log(R^{-1}\tilde{R})\parallel^2_\Sigma } p(R~)=β(R~) e−21∥Log(R−1R~)∥Σ2
ϵ \epsilon ϵ是小的协方差矩阵则, β ≈ α \beta\approx\alpha β≈α, 即 J ( R ~ ) = 1 J(\tilde{R})=1 J(R~)=1, 并且 R ~ \tilde{R} R~接近R, 求其最大似然(log):
L ( R ) = 1 2 ∥ L o g ( R − 1 R ~ ) ∥ Σ 2 + c o n s t = 1 2 ∥ L o g ( R ~ − 1 R ) ∥ Σ 2 + c o n s t {\mathcal L}(R) = \frac{1}{2}\parallel Log(R^{-1}\tilde{R})\parallel^2_\Sigma + const = \frac{1}{2}\parallel Log(\tilde{R}^{-1}{R})\parallel^2_\Sigma + const L(R)=21∥Log(R−1R~)∥Σ2+const=21∥Log(R~−1R)∥Σ2+const
其中const是 L o g ( β ) Log(\beta) Log(β).
他的几何意义是SO(3)上的距离的平方, 不确定性权重为协方差的逆 Σ − 1 \Sigma^{-1} Σ−1.
c.流形上的高斯牛顿法
欧几里得空间的高斯牛顿法是迭代优化目标函数的二次近似(通常非凸),求解中通常简化为一系列的线性方程。
当变量属于流形时
min x ∈ M f ( x ) \min_{x\in\mathcal{M}}\ f(x) x∈Mmin f(x)
为了简化,我们只考虑一个变量时。
这里我们不能直接近似为 x x x的二次函数。因为,
- 会使参数增多(9×3个)会导致欠定。
- 这么做会使结果不再是流形 M \mathcal M M上的了,不满足SO(3)定义。
通常的做法是定义一个映射 R x \mathcal{R}_x Rx, 它是由李代数(tan 空间)上的 δ x \delta x δx到 x ∈ M x \in \mathcal{M} x∈M流形上附近值的一个映射.如下:
min x ∈ M f ( x ) ⇒ min δ x ∈ R n f ( R ( δ x ) ) . \min_{x\in\mathcal{M}}\ f(x) \Rightarrow \min_{\delta x \in \R^n} f(\mathcal{R}(\delta x)). x∈Mmin f(x)⇒δx∈Rnminf(R(δx)).
这种重新参数化叫做lifting.。这样就可以在欧几里得空间(也就是tan空间)进行优化,粗略地说当前估计定义在tan空间,而附近的增量是欧几里得空间。
在高斯牛顿框架下,求解当前估计的代价函数平方,得到最小时的李代数 δ x ∗ \delta x^* δx∗(tan空间),最终更新流形上的估计值
x ^ ← R x ^ ( δ x ∗ ) \hat x \gets {\mathcal R}_{\hat x}(\delta x^*) x^←Rx^(δx∗)
这种方法是误差状态模型的基础和统一推广,通常是用于航空航天文献中的滤波方法.
本文中使用以下定义这种retraction(缩放?)
R R ( ϕ ) = R E x p ( δ ϕ ) , δ ϕ ∈ R 3 {\mathcal R}_R(\phi)=\rm R \ Exp(\delta \phi), \quad \delta\phi \in\R^3 RR(ϕ)=R Exp(δϕ),δϕ∈R3
R T ( δ ϕ , δ p ) = ( R E x p ( δ ϕ ) , p + R δ p ) , [ δ ϕ δ p ] ∈ R 6 {\mathcal R}_T(\delta\phi,\delta {\bf p})=({\rm R \ Exp(\delta\phi)}, {\bf p}+{\rm R} \delta {\bf p} ), \quad \begin{bmatrix}\delta \phi &\delta{\bf p}\end{bmatrix} \in \R^6 RT(δϕ,δp)=(R Exp(δϕ),p+Rδp),[δϕδp]∈R6
四、最大后验视觉惯导状态估计
IMU的坐标系与机体坐标系一致,相机与机体系之间的变换关系已知.
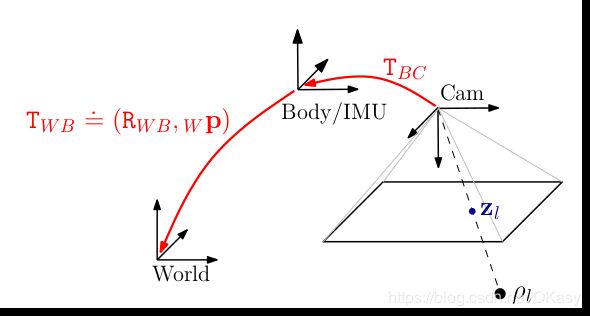
系统状态变量为姿态,位置,速度,偏差:
x i ≐ [ R i , p i , v i , b i ] {\bf x}_i \doteq [{\bf R}_i,{\bf p}_i,{\bf v}_i,{\bf b}_i] xi≐[Ri,pi,vi,bi]
K k {\mathcal K}_k Kk表示到时间k所有关键帧的序列,我们估计所有关键帧的状态:
K k ≐ { X i } i ∈ K k {\mathcal K}_k\doteq \lbrace {\rm X}_i \rbrace_{i\in{\mathcal K}_k} Kk≐{Xi}i∈Kk
测量的关键帧图像 C i {\mathcal C}_i Ci包含许多路标点 l l l, 因此有观测值 z i l {\bf z}_{il} zil. I i j {\mathcal I}_{ij} Iij表示两关键帧之间的IMU测量值. 因此测量可以表示为:
Z k ≐ { C i , I i j } ( i , j ) ∈ K k {\mathcal Z}_k \doteq \lbrace{\mathcal C}_i ,{\mathcal I}_{ij} \rbrace _{(i, j)\in{\mathcal K}_k} Zk≐{Ci,Iij}(i,j)∈Kk
X k {\mathcal X}_k Xk的后验概率:
p ( X k ∣ Z k ) ∝ p ( X 0 ) p ( Z k ∣ X k ) = ( a ) p ( X 0 ) ∏ ( i , j ) ∈ K k p ( C i , I i j ∣ X k ) = ( b ) p ( X 0 ) ∏ ( i , j ) ∈ K k p ( I i j ∣ x i , x j ) ∏ i ∈ K k ∏ l ∈ C i p ( z i l ∣ x i ) p({\mathcal X}_k | {\mathcal Z _k} )\propto p({\mathcal X}_0)p({\mathcal Z}_k | {\mathcal X }_k ) \overset {(a)}= p({\mathcal X}_0) \prod _{(i,j)\in{\mathcal K_k}}p({\mathcal C_i, I_{ij}|}{\mathcal X_k}) \\ \overset {(b)}=p({\mathcal X_0}) \prod _{(i,j)\in{\mathcal K_k}}p({\mathcal I_{ij}|x_i, x_j}) \prod_{i \in {\mathcal K_k}} \prod_{l \in {\mathcal C_i}}p(z_{il}|x_i) p(Xk∣Zk)∝p(X0)p(Zk∣Xk)=(a)p(X0)(i,j)∈Kk∏p(Ci,Iij∣Xk)=(b)p(X0)(i,j)∈Kk∏p(Iij∣xi,xj)i∈Kk∏l∈Ci∏p(zil∣xi)
使用因子图来求解.
使用-log形式进行MAP估计, 可以写成残差像的和, 通俗说就是当前状态下预测值与测量值之间的不匹配度.
X k ∗ ≐ a r g min X k − log e p ( X k ∣ Z k ) = arg min X k ∥ r 0 ∥ Σ 0 2 + ∑ ( i , j ) ∈ K k ∥ r I i , j ∥ Σ i , j 2 + ∑ i ∈ K k ∑ l ∈ C i ∥ r C i l ∥ Σ C 2 \begin{aligned} {\mathcal X}_k^* &\doteq arg \min _{{\mathcal X}_k} -\log_e p({\mathcal X}_k|{\mathcal Z}_k) \\ &=\arg \min _{{\mathcal X}_k}\|{\bf r}_0\|^2_{\Sigma_0}+\sum_{(i, j)\in{\mathcal K}_k}\|{\bf r}_{{\mathcal I}_{i,j}}\|^2_{\Sigma_{i,j}}+\sum_{i \in{\mathcal K}_k} \sum_{l\in{\mathcal C_i}}\|{\bf r}_{{\mathcal C}_{il}}\|^2_{\Sigma_{\mathcal C}} \end{aligned} Xk∗≐argXkmin−logep(Xk∣Zk)=argXkmin∥r0∥Σ02+(i,j)∈Kk∑∥rIi,j∥Σi,j2+i∈Kk∑l∈Ci∑∥rCil∥ΣC2
五、IMU模型和运动积分
陀螺仪测量模型:
B ω ~ W B ( t ) = B ω W B ( t ) + b g ( t ) + η g ( t ) {_B}\tilde{\bf \omega}_{WB}(t)={_B}{\omega}_{WB}(t)+{\bf b}^{g}(t)+{\bf \eta}^g(t) Bω~WB(t)=BωWB(t)+bg(t)+ηg(t)
加速度计测量模型:
B a ~ ( t ) = R W B T ( t ) ( W a ( t ) − W g ) + b a ( t ) + η a ( t ) _B \tilde {\bf a}(t)={\rm R_{WB}^{T}}(t)(_{W}{\bf a}(t)-_{W}{\bf g})+{\bf b}^a(t)+{\bf \eta}^a(t) Ba~(t)=RWBT(t)(Wa(t)−Wg)+ba(t)+ηa(t)
其中下标B表示机体坐标系, W表示世界坐标系(静止的), WB表示B系到W系转换. b {\bf b} b为缓慢变化的bias; η \eta η表示白噪声.
运动模型:
R W B ˙ = R W B B ω W B ∧ , W v ˙ = W a , W p ˙ = W v \dot{R_{\rm WB}}={R_{\rm WB}} _{\rm B}{\bf \omega}_{\rm WB}^{\wedge}, \quad _{\rm W}\dot{\bf v}=_{\rm W}{\bf a}, \quad _{\rm W}\dot{\bf p}=_{\rm W}{\bf v} RWB˙=RWBBωWB∧,Wv˙=Wa,Wp˙=Wv
在时间段 [ t , t + Δ t ] [t,t+\Delta t] [t,t+Δt]上使用欧拉积分
R W B ( t + Δ t ) = R W B ( t ) E x p ( B ω W B ( t ) Δ t ) W v ( t + Δ t ) = W v ( t ) + W a ( t ) Δ t W p ( t + Δ t ) = W p ( t ) + W v ( t ) Δ t + 1 2 W a ( t ) Δ t 2 (28) \begin{aligned} &{\rm R_{WB}}(t+\Delta t)={\rm R_{WB}}(t){\rm Exp}(_{\rm B}{\bf \omega}_{\rm WB}(t)\Delta t) \\ &_{\rm W}{\bf v}(t+\Delta t)=_{\rm W}{\bf v}(t)+_{\rm W}{\bf a}(t)\Delta t \\ &_{\rm W}{\bf p}(t+\Delta t)=_{\rm W}{\bf p}(t)+_{\rm W}{\bf v}(t)\Delta t+\frac{1}{2} {_{\rm W}{\bf a}(t)}\Delta t^2 \end{aligned} \tag {28} RWB(t+Δt)=RWB(t)Exp(BωWB(t)Δt)Wv(t+Δt)=Wv(t)+Wa(t)ΔtWp(t+Δt)=Wp(t)+Wv(t)Δt+21Wa(t)Δt2(28)
将(25)(26)的测量模型公式代入得到:
R ( t + Δ t ) = R ( t ) E x p ( ( ω ~ ( t ) − b g ( t ) − η g d ( t ) ) Δ t ) v ( t + Δ t ) = v ( t ) + g Δ t + R ( t ) ( a ~ ( t ) − b a ( t ) − η a d ( t ) ) Δ t p ( t + Δ t ) = p ( t ) + v ( t ) Δ t + 1 2 g Δ t 2 + 1 2 R ( t ) ( a ~ ( t ) − b a ( t ) − η a d ( t ) ) Δ t 2 (29) \begin{aligned} &{\rm R}(t+\Delta t)={\rm R}(t){\rm Exp}((\tilde{\omega}(t)-{\bf b}^{g}(t)-{\bf \eta}^{gd}(t))\Delta t) \\ &{\bf v}(t+\Delta t)={\bf v}(t)+{\bf g}\Delta t +{\rm R}(t)(\tilde {\bf a}(t)-{\bf b}^a(t)-{\bf \eta}^{ad}(t))\Delta t \\ &{\bf p}(t+\Delta t)={\bf p}(t)+{\bf v}(t)\Delta t+\frac{1}{2} {\bf g}\Delta t^2+\frac{1}{2}{\rm R}(t) (\tilde{\bf a}(t)-{\bf b}^a(t)-{\bf \eta}^{ad}(t))\Delta t^2 \end{aligned}\tag {29} R(t+Δt)=R(t)Exp((ω~(t)−bg(t)−ηgd(t))Δt)v(t+Δt)=v(t)+gΔt+R(t)(a~(t)−ba(t)−ηad(t))Δtp(t+Δt)=p(t)+v(t)Δt+21gΔt2+21R(t)(a~(t)−ba(t)−ηad(t))Δt2(29)
这里简化了符号的表示. 公式中我们假设 R ( t ) {\rm R}(t) R(t)是恒定不变的, 这样会导致产生误差, 但当IMU频率较高时, 这个影响会大大减小. 当使用的IMU的频率较小时, 需要使用更高阶的数值积分方法.
其中的白噪声离散形式协方差为原噪声协方差的除以时间间隔 Δ t \Delta t Δt.
六、流形上的IMU预积分
IMU预积分的初衷,是希望借鉴纯视觉SLAM中图优化的思想,将帧与帧之间IMU相对测量信息转换为约束节点(载体位姿)的边参与到优化框架中。
- IMU预积分理论最大的贡献是对这些IMU相对测量进行处理,使得它与绝对位姿解耦(或者只需要线性运算就可以进行校正),从而大大提高优化速度。
- 这种优化架构还使得加计测量中不受待见的重力变成一个有利条件——重力的存在将使整个系统对绝对姿态(指相对水平地理坐标系的俯仰角和横滚角,不包括真航向)可观。要知道纯视觉VO或者SLAM是完全无法得到绝对姿态的。
- 两种传感器融合可以利用冗余测量(例如两种方式都可以求取相对位姿)来抑制累积误差。
- IMU和视觉这两种不同源的测量,也使得IMU的bias可观,从而可以在优化中被有效估计。
- 纯单目视觉缺乏绝对尺度的问题,也可以由惯性信息的引入而得以解决。
将两关键帧 i i i和 j j j之间的综合成一个复合的测量值, 叫preintegrated IMU measurement, 它约束连续关键帧之间的运动.
两个关键帧之间的关系如下:
R j = R i ∏ k = i j − 1 E x p ( ( ω ~ k − b k g − η k g d ) Δ t ) , v j = v i + g Δ t i j + ∑ k = i j − 1 R k ( a ~ k − b k a − η k a d ) Δ t p j = p i + ∑ k = i j − 1 [ v k Δ t + 1 2 g Δ t 2 + 1 2 R k ( a ~ k − b k a − η k a d ) Δ t 2 ] (30) \begin{aligned} &{\bf R}_j={\bf R}_i \prod_{k=i}^{j-1}{\rm Exp((\tilde \omega_k-b_k^g-\eta_k^{gd})\Delta t)}, \\ &{\bf v}_j={\bf v}_i+{\bf g}\Delta t_{ij}+\sum_{k=i}^{j-1}{\bf R}_k(\tilde{\bf a}_k-{\bf b}_k^a-\eta_k^{ad})\Delta t \\ &{\bf p}_j={\bf p}_i+\sum_{k=i}^{j-1}[{\bf v}_k \Delta t+\frac{1}{2}{\bf g}\Delta t^2+\frac{1}{2}{\bf R}_k(\tilde{\bf a}_k-{\bf b}_k^a-\eta_k^{ad})\Delta t^2] \end{aligned}\tag {30} Rj=Rik=i∏j−1Exp((ω~k−bkg−ηkgd)Δt),vj=vi+gΔtij+k=i∑j−1Rk(a~k−bka−ηkad)Δtpj=pi+k=i∑j−1[vkΔt+21gΔt2+21Rk(a~k−bka−ηkad)Δt2](30)
从该公式(30)可以看出当初始值改变, 如 R i {\bf R}_i Ri改变会导致每一个公式都需要重新计算. 为了解决这个缺陷, 给出不受线性化点影响的增量表达式:
Δ R i j = R i T R j = ∏ k = i j − 1 E x p ( ( ω ~ k − b k g − η k g d ) Δ t ) , Δ v i j = R i T ( v j − v i − g Δ t i j ) = ∑ k = i j − 1 Δ R i k ( a ~ k − b k a − η k a d ) Δ t Δ p i j = R i T ( p j − p i − v i Δ t i j − 1 2 g Δ t i j 2 ) = ∑ k = i j − 1 [ Δ v i k Δ t + 1 2 Δ R i k ( a ~ k − b k a − η k a d ) Δ t 2 ] (31) \begin{aligned} &\Delta {\bf R}_{ij}={\bf R}_i^T{\bf R}_j= \prod_{k=i}^{j-1}{\rm Exp((\tilde \omega_k-b_k^g-\eta_k^{gd})\Delta t)}, \\ &\Delta {\bf v}_{ij}={\bf R}_i^T({\bf v}_j-{\bf v}_i-{\bf g}\Delta t_{ij})=\sum_{k=i}^{j-1}\Delta{\bf R}_{ik}(\tilde{\bf a}_k-{\bf b}_k^a-\eta_k^{ad})\Delta t \\ &\Delta {\bf p}_{ij} ={\bf R}_i^T({\bf p}_j-{\bf p}_i-{\bf v}_i \Delta t_{ij}-\frac{1}{2}{\bf g}\Delta t_{ij}^2)\\ & \qquad \ =\sum_{k=i}^{j-1}[\Delta{\bf v}_{ik} \Delta t+\frac{1}{2}\Delta{\bf R}_{ik}(\tilde{\bf a}_k-{\bf b}_k^a-\eta_k^{ad})\Delta t^2] \end{aligned}\tag {31} ΔRij=RiTRj=k=i∏j−1Exp((ω~k−bkg−ηkgd)Δt),Δvij=RiT(vj−vi−gΔtij)=k=i∑j−1ΔRik(a~k−bka−ηkad)ΔtΔpij=RiT(pj−pi−viΔtij−21gΔtij2) =k=i∑j−1[ΔvikΔt+21ΔRik(a~k−bka−ηkad)Δt2](31)
最后的式子应用了等差数列求和公式推导, 证明如下:

这里的速度和位置 Δ \Delta Δ值并不能代表真正的物理变化, 但却使得它与 i i i时刻状态和重力独立, 能够直接根据惯性测量值计算出来. 这些值仍是Bias的函数, 假设Bias在两关键帧之间保持不变.
A. Preintegrated IMU Measurements
(1) Δ R i j \Delta {\bf R}_{ij} ΔRij项
公式中包含的测量噪声使得MAP(最大后验估计)无法应用, 我们对公式进行变换, 把噪声独立出来, 使得log似然更容易获得. 假设 i i i时刻bias已知且不变. 使用公式(6)和公式(9)将连乘展开后, 从第二个开始使用公式(8)进行两两合并, 之后再进行两两合并, 直到前面只有第一个Exp的连乘, 后面只有第二个Exp的复合连乘)_进行变换:
Δ R i j ≃ e q ( 6 ) ∏ k = i j − 1 [ E x p ( ( ω ~ k − b i g ) Δ t ) E x p ( − J r k η k g d Δ t ) ] = e q ( 9 ) Δ R ~ i j ∏ k = i j − 1 E x p ( − Δ R ~ k + 1 j T J r k η k g d Δ t ) ≐ Δ R ~ i j E x p ( − δ ϕ i j ) (32) \begin{aligned} \Delta {\bf R}_{ij} &\overset{eq(6)} \simeq \prod_{k=i}^{j-1}\ [{\rm Exp((\tilde \omega_k-b_i^g)\Delta t)}{\rm Exp}(-{\rm J}_r^k \eta_k^{gd} \Delta t)] \\ &\overset{eq(9)} = \Delta \tilde {\bf R}_{ij}\prod_{k=i}^{j-1}{\rm Exp}(-\Delta \tilde {\bf R}_{k+1j}^T {\rm J}_r^k \eta_k^{gd} \Delta t) \\ &\doteq \Delta \tilde {\bf R}_{ij}{\rm Exp}(-\delta \phi_{ij}) \end{aligned}\tag {32} ΔRij≃eq(6)k=i∏j−1 [Exp((ω~k−big)Δt)Exp(−JrkηkgdΔt)]=eq(9)ΔR~ijk=i∏j−1Exp(−ΔR~k+1jTJrkηkgdΔt)≐ΔR~ijExp(−δϕij)(32)
其中:
J r k ≐ J r k ( ( ω ~ k − b i g ) Δ t ) Δ R ~ i j = ∏ k = i j − 1 E x p ( ( ω ~ k − b i g ) Δ t ) (33) {\rm J}_r^k \doteq {\rm J}_r^k((\tilde \omega_k-b_i^g)\Delta t) \\ \Delta \tilde {\bf R}_{ij}=\prod_{k=i}^{j-1}\ {\rm Exp}((\tilde \omega_k-b_i^g)\Delta t) \tag {33} Jrk≐Jrk((ω~k−big)Δt)ΔR~ij=k=i∏j−1 Exp((ω~k−big)Δt)(33)
δ ϕ i j \delta \phi_{ij} δϕij定义为噪声.
总结:
Δ R i j ≐ Δ R ~ i j E x p ( − δ ϕ i j ) Δ R ~ i j = ∏ k = i j − 1 E x p ( ( ω ~ k − b i g ) Δ t ) E x p ( − δ ϕ i j ) = ∏ k = i j − 1 E x p ( − Δ R ~ k + 1 j T J r k η k g d Δ t ) (34) \Delta {\bf R}_{ij}\doteq \Delta \tilde {\bf R}_{ij}{\rm Exp}(- \delta \phi_{ij}) \\ \Delta \tilde {\bf R}_{ij}=\prod_{k=i}^{j-1}\ {\rm Exp}((\tilde \omega_k-b_i^g)\Delta t) \\ {\rm Exp}(- \delta \phi_{ij}) =\prod_{k=i}^{j-1}{\rm Exp}(-\Delta \tilde {\bf R}_{k+1j}^T {\rm J}_r^k \eta_k^{gd} \Delta t) \tag {34} ΔRij≐ΔR~ijExp(−δϕij)ΔR~ij=k=i∏j−1 Exp((ω~k−big)Δt)Exp(−δϕij)=k=i∏j−1Exp(−ΔR~k+1jTJrkηkgdΔt)(34)
(2) Δ v i j \Delta {\bf v}_{ij} Δvij项
将式(32)代入(31)的速度预积分公式中, 对Exp进行一阶近似, 并且忽略高次微小量.得到:
Δ v i j = ∑ k = i j − 1 Δ R ~ i k E x p ( − δ ϕ i k ) ( a ~ k − b k a − η k a d ) Δ t = ∑ k = i j − 1 [ Δ R ~ i k ( I − δ ϕ i k ∧ ) ( a ~ k − b k a ) Δ t − Δ R ~ i k η k a d Δ t ] = ∑ k = i j − 1 [ Δ R ~ i k ( a ~ k − b k a ) Δ t ] + ∑ k = i j − 1 [ Δ R ~ i k ( a ~ k − b k a ) ∧ δ ϕ i k Δ t − Δ R ~ i k η k a d Δ t ] (35) \begin{aligned} \Delta {\bf v}_{ij} &= \sum_{k=i}^{j-1}\Delta \tilde {\bf R}_{ik}{\rm Exp}(- \delta \phi_{ik})(\tilde{\bf a}_k-{\bf b}_k^a-\eta_k^{ad})\Delta t \\ &= \sum_{k=i}^{j-1}[ \Delta \tilde {\bf R}_{ik}({\bf I}-\delta \phi_{ik}^\wedge)(\tilde{\bf a}_k-{\bf b}_k^a)\Delta t - \Delta \tilde {\bf R}_{ik}\eta_k^{ad}\Delta t ] \\ &=\sum_{k=i}^{j-1}[ \Delta \tilde {\bf R}_{ik}(\tilde{\bf a}_k-{\bf b}_k^a)\Delta t ]+\sum_{k=i}^{j-1}[ \Delta \tilde {\bf R}_{ik}(\tilde{\bf a}_k-{\bf b}_k^a)^\wedge\delta \phi_{ik}\Delta t- \Delta \tilde {\bf R}_{ik}\eta_k^{ad}\Delta t ] \end{aligned} \tag {35} Δvij=k=i∑j−1ΔR~ikExp(−δϕik)(a~k−bka−ηkad)Δt=k=i∑j−1[ΔR~ik(I−δϕik∧)(a~k−bka)Δt−ΔR~ikηkadΔt]=k=i∑j−1[ΔR~ik(a~k−bka)Δt]+k=i∑j−1[ΔR~ik(a~k−bka)∧δϕikΔt−ΔR~ikηkadΔt](35)
总结:
Δ v i j ≜ Δ v ~ i j − δ v i j Δ v ~ i j = ∑ k = i j − 1 [ Δ R ~ i k ( a ~ k − b k a ) Δ t ] δ v i j = ∑ k = i j − 1 [ Δ R ~ i k η k a d Δ t − Δ R ~ i k ( a ~ k − b k a ) ∧ δ ϕ i k Δ t ] (36) \Delta {\bf v}_{ij} \triangleq \Delta \tilde {\bf v}_{ij}-\delta {\bf v}_{ij} \\ \Delta \tilde {\bf v}_{ij}=\sum_{k=i}^{j-1}[ \Delta \tilde {\bf R}_{ik}(\tilde{\bf a}_k-{\bf b}_k^a)\Delta t ] \\ \delta {\bf v}_{ij} = \sum_{k=i}^{j-1}[ \Delta \tilde {\bf R}_{ik}\eta_k^{ad}\Delta t -\Delta \tilde {\bf R}_{ik}(\tilde{\bf a}_k-{\bf b}_k^a)^\wedge\delta \phi_{ik}\Delta t ] \tag {36} Δvij≜Δv~ij−δvijΔv~ij=k=i∑j−1[ΔR~ik(a~k−bka)Δt]δvij=k=i∑j−1[ΔR~ikηkadΔt−ΔR~ik(a~k−bka)∧δϕikΔt](36)
(3) Δ p i j \Delta{\bf p}_{ij} Δpij项
同上(34)和(36)式代入(31)中得到:
Δ p i j = ∑ k = i j − 1 [ ( Δ v ~ i k − δ v i k ) Δ t + 1 2 Δ R ~ i k ( I − δ ϕ i k ∧ ) ( a ~ k − b k a ) Δ t 2 − 1 2 Δ R ~ i k η k a d Δ t 2 ] = ∑ k = i j − 1 [ Δ v ~ i k Δ t + 1 2 Δ R ~ i k ( a ~ k − b k a ) Δ t 2 ] + ∑ k = i j − 1 [ 1 2 Δ R ~ i k ( a ~ k − b k a ) ∧ δ ϕ i k Δ t 2 − 1 2 Δ R ~ i k η k a d Δ t 2 − δ v i k Δ t ] (37) \begin{aligned} \Delta {\bf p}_{ij}&=\sum_{k=i}^{j-1}[ ( \Delta \tilde {\bf v}_{ik}-\delta {\bf v}_{ik})\Delta t + \frac{1}{2} \Delta \tilde {\bf R}_{ik}({\bf I}-\delta \phi_{ik}^\wedge)(\tilde{\bf a}_k-{\bf b}_k^a)\Delta t^2 -\frac{1}{2} \Delta \tilde {\bf R}_{ik}\eta_k^{ad}\Delta t^2 ]\\ &=\sum_{k=i}^{j-1}[ \Delta \tilde {\bf v}_{ik}\Delta t+\frac{1}{2}\Delta \tilde {\bf R}_{ik}(\tilde{\bf a}_k-{\bf b}_k^a)\Delta t^2 ] \\ & \quad + \sum_{k=i}^{j-1}[\frac{1}{2}\Delta \tilde {\bf R}_{ik}(\tilde{\bf a}_k-{\bf b}_k^a)^\wedge \delta\phi_{ik}\Delta t^2 -\frac{1}{2} \Delta \tilde {\bf R}_{ik}\eta_k^{ad}\Delta t^2-\delta {\bf v}_{ik}\Delta t] \end{aligned} \tag{37} Δpij=k=i∑j−1[(Δv~ik−δvik)Δt+21ΔR~ik(I−δϕik∧)(a~k−bka)Δt2−21ΔR~ikηkadΔt2]=k=i∑j−1[Δv~ikΔt+21ΔR~ik(a~k−bka)Δt2]+k=i∑j−1[21ΔR~ik(a~k−bka)∧δϕikΔt2−21ΔR~ikηkadΔt2−δvikΔt](37)
总结:
Δ p i j ≜ Δ p ~ i j − δ p i j Δ p ~ i j = ∑ k = i j − 1 [ Δ v ~ i k Δ t + 1 2 Δ R ~ i k ( a ~ k − b k a ) Δ t 2 ] δ p i j = ∑ k = i j − 1 [ 1 2 Δ R ~ i k η k a d Δ t 2 − 1 2 Δ R ~ i k ( a ~ k − b k a ) ∧ δ ϕ i k Δ t 2 + δ v i k Δ t ] (38) \Delta {\bf p}_{ij} \triangleq \Delta \tilde {\bf p}_{ij}-\delta {\bf p}_{ij} \\ \Delta \tilde {\bf p}_{ij} =\sum_{k=i}^{j-1}[ \Delta \tilde {\bf v}_{ik}\Delta t+\frac{1}{2}\Delta \tilde {\bf R}_{ik}(\tilde{\bf a}_k-{\bf b}_k^a)\Delta t^2 ] \\ \delta {\bf p}_{ij} = \sum_{k=i}^{j-1}[\frac{1}{2} \Delta \tilde {\bf R}_{ik}\eta_k^{ad}\Delta t^2 -\frac{1}{2}\Delta \tilde {\bf R}_{ik}(\tilde{\bf a}_k-{\bf b}_k^a)^\wedge \delta\phi_{ik}\Delta t^2 + \delta {\bf v}_{ik}\Delta t] \tag{38} Δpij≜Δp~ij−δpijΔp~ij=k=i∑j−1[Δv~ikΔt+21ΔR~ik(a~k−bka)Δt2]δpij=k=i∑j−1[21ΔR~ikηkadΔt2−21ΔR~ik(a~k−bka)∧δϕikΔt2+δvikΔt](38)
公式(34)(36)(38)代入公式(31)得到预积分测量模型,公式(39)左侧为预积分测量值(由IMU测量值和Bias的猜测估计值组成), 右侧为真值+预积分测量噪声.
Δ R ~ i j = R i T R j E x p ( δ ϕ i j ) Δ v ~ i j = R i T ( v j − v i − g Δ t i j ) + δ v i j Δ p ~ i j = R i T ( p j − p i − v i Δ t i j − 1 2 g Δ t i j 2 ) + δ p i j (39) \Delta \tilde {\bf R}_{ij} ={\bf R}_i^{\rm T}{\bf R}_j{\rm Exp}(\delta\phi_{ij}) \\ \Delta \tilde{\bf v}_{ij}={\bf R}_i^T({\bf v}_j-{\bf v}_i-{\bf g}\Delta t_{ij})+\delta{\bf v_{ij}} \\ \Delta \tilde{\bf p}_{ij}={\bf R}_i^T({\bf p}_j-{\bf p}_i-{\bf v}_i \Delta t_{ij}-\frac{1}{2}{\bf g}\Delta t_{ij}^2)+\delta{\bf p}_{ij} \tag{39} ΔR~ij=RiTRjExp(δϕij)Δv~ij=RiT(vj−vi−gΔtij)+δvijΔp~ij=RiT(pj−pi−viΔtij−21gΔtij2)+δpij(39)
B. Noise Propagation
希望使噪声符合高斯分布, 定义噪声向量:
η i j Δ ≜ [ δ ϕ i j T , δ v i j T , δ p i j T ] T ∼ N ( 0 9 × 1 , Σ i j ) (40) {\bf \eta}_{ij}^\Delta \triangleq[\delta\phi_{ij}^{\rm T}, \ \delta{\bf v}_{ij}^{\rm T}, \ \delta{\bf p}_{ij}^{\rm T}]^{\rm T} \sim {\mathcal N}(0_{9\times1},\Sigma_{ij}) \tag{40} ηijΔ≜[δϕijT, δvijT, δpijT]T∼N(09×1,Σij)(40)
对旋转量预积分噪声 δ ϕ i j \delta \phi _{ij} δϕij两端取-Log得到:
δ ϕ i j = − L o g ( Π k = i j − 1 E x p ( − Δ R ~ k + 1 j T J r k η k g d Δ t ) ) (41) \delta \phi_{ij}=-{\rm Log}(\Pi_{k=i}^{j-1}{\rm Exp}(-\Delta \tilde{\bf R}_{k+1j}^{\rm T}{\rm J}^k_r\eta^{gd}_k\Delta t)) \tag{41} δϕij=−Log(Πk=ij−1Exp(−ΔR~k+1jTJrkηkgdΔt))(41)
其中的 η k g d \eta_k^{gd} ηkgd为微小量, 利用公式
L o g ( E x p ( ϕ ) E x p ( δ ϕ ) ) = ϕ + J r − 1 ( ϕ ) δ ϕ (42) \rm Log( Exp(\phi)\ Exp(\delta \phi))=\phi+J_r^{-1}(\phi) \delta \phi \tag{42} Log(Exp(ϕ) Exp(δϕ))=ϕ+Jr−1(ϕ)δϕ(42)
得到
δ ϕ i j ≃ Σ k = i j − 1 Δ R ~ k + 1 j T J r k η k g d Δ t (43) \delta \phi_{ij} \simeq \Sigma_{k=i}^{j-1}\Delta\tilde{\bf R}_{k+1j}^{\rm T}{\rm J}^k_r\boldsymbol{\eta}^{gd}_k\Delta t \tag{43} δϕij≃Σk=ij−1ΔR~k+1jTJrkηkgdΔt(43)
证明:

由公式(43)可知, δ ϕ i j \delta \phi _{ij} δϕij是 η k g d \boldsymbol{\eta}^{gd}_k ηkgd线性组合, 因此也是零均值的高斯分布.
对于 δ v i j , δ p i j \delta{\bf v}_{ij}, \ \delta{\bf p}_{ij} δvij, δpij, 根据(36)(38)的增量项公式可知它们是 δ ϕ i j \delta \phi _{ij} δϕij和 η k a d \boldsymbol{\eta}^{ad}_k ηkad的线性组合, 因此也符合零均值的高斯分布.
B1. Iterative Noise Propagation
我们可以通过递推的形式求解 η i j Δ \boldsymbol{\eta}_{ij}^{\Delta} ηijΔ和其协方差 Σ i j \boldsymbol{\Sigma}_{ij} Σij.
δ ϕ i j = Δ R ~ j j − 1 δ ϕ i j − 1 + J r j − 1 η j − 1 g d Δ t δ v i j = δ v i j − 1 + Δ R ~ i j − 1 η j − 1 a d Δ t − Δ R ~ i j − 1 ( a ~ j − 1 − b i a ) ∧ δ ϕ i j − 1 Δ t δ p i j = δ p i j − 1 + δ v i j − 1 Δ t + 1 2 Δ R ~ i j − 1 η j − 1 a d Δ t 2 − 1 2 Δ R ~ i j − 1 ( a ~ j − 1 − b i a ) ∧ δ ϕ i j − 1 Δ t 2 (44) \begin{aligned} \delta \phi_{ij}&=\Delta \tilde{\bf R}_{jj-1}\delta\phi_{ij-1}+{\bf J}_r^{j-1}\boldsymbol{\eta}_{j-1}^{gd}\Delta t \\ \delta{\bf v}_{ij}&= \delta {\bf v}_{ij-1}+ \Delta \tilde {\bf R}_{ij-1}\eta_{j-1}^{ad}\Delta t -\Delta \tilde {\bf R}_{ij-1}(\tilde{\bf a}_{j-1}-{\bf b}_i^a)^\wedge\delta \phi_{ij-1}\Delta t \\ \delta{\bf p}_{ij}&=\delta{\bf p}_{ij-1}+\delta {\bf v}_{ij-1}\Delta t+\frac{1}{2} \Delta \tilde {\bf R}_{ij-1}\boldsymbol{\eta}_{j-1}^{ad}\Delta t^2 -\frac{1}{2}\Delta \tilde {\bf R}_{ij-1}(\tilde{\bf a}_{j-1}-{\bf b}_i^a)^\wedge \delta\phi_{ij-1}\Delta t^2 \end{aligned} \tag{44} δϕijδvijδpij=ΔR~jj−1δϕij−1+Jrj−1ηj−1gdΔt=δvij−1+ΔR~ij−1ηj−1adΔt−ΔR~ij−1(a~j−1−bia)∧δϕij−1Δt=δpij−1+δvij−1Δt+21ΔR~ij−1ηj−1adΔt2−21ΔR~ij−1(a~j−1−bia)∧δϕij−1Δt2(44)
其中第一个公式证明如下, 后两个公式即拆出一项即可.

定义IMU的测量噪声向量为
η k d = [ η k g d , η k a d ] (45) \boldsymbol{\eta}^d_{k}=[\boldsymbol{\eta}^{gd}_{k}, \ \boldsymbol{\eta}^{ad}_{k}] \tag{45} ηkd=[ηkgd, ηkad](45)
将式(44)写成矩阵形式:
η i j Δ = A j − 1 η i j − 1 Δ + B j − 1 η j − 1 d (46) \boldsymbol{\eta}^\Delta_{ij}={\bf A}_{j-1}\boldsymbol{\eta}^\Delta_{ij-1}+{\bf B}_{j-1}\boldsymbol{\eta}^d_{j-1} \tag{46} ηijΔ=Aj−1ηij−1Δ+Bj−1ηj−1d(46)
其中
A j − 1 = [ Δ R ~ j j − 1 0 0 − Δ R ~ i j − 1 ( a ~ j − 1 − b i a ) ∧ Δ t I 0 − 1 2 Δ R ~ i j − 1 ( a ~ j − 1 − b i a ) ∧ Δ t 2 Δ t I I ] (47) {\bf A}_{j-1}=\begin{bmatrix} \Delta\tilde{\bf R}_{jj-1} &0 &0 \\ -\Delta \tilde {\bf R}_{ij-1}(\tilde{\bf a}_{j-1}-{\bf b}_i^a)^\wedge\Delta t & {\bf I} & 0 \\ -\frac{1}{2}\Delta \tilde {\bf R}_{ij-1}(\tilde{\bf a}_{j-1}-{\bf b}_i^a)^\wedge\Delta t^2 &\Delta t{\bf I} &{\bf I} \end{bmatrix} \tag{47} Aj−1=⎣⎡ΔR~jj−1−ΔR~ij−1(a~j−1−bia)∧Δt−21ΔR~ij−1(a~j−1−bia)∧Δt20IΔtI00I⎦⎤(47)
B j − 1 = [ J r j − 1 Δ t 0 0 Δ R ~ i j − 1 Δ t 0 1 2 Δ R ~ i j − 1 Δ t 2 ] (48) {\bf B}_{j-1} = \begin{bmatrix} {\bf J}_r^{j-1}\Delta t & 0 \\ 0 &\Delta \tilde {\bf R}_{ij-1}\Delta t \\ 0& \frac{1}{2}\Delta \tilde {\bf R}_{ij-1}\Delta t^2 \end{bmatrix} \tag{48} Bj−1=⎣⎡Jrj−1Δt000ΔR~ij−1Δt21ΔR~ij−1Δt2⎦⎤(48)
据此可以求得预积分测量噪声的协方差矩阵:
Σ i j = A j − 1 Σ i j − 1 A j − 1 T + B j − 1 Σ η B j − 1 T (49) \Sigma_{ij}={\bf A}_{j-1}\Sigma_{ij-1}{\bf A}_{j-1}^T+{\bf B}_{j-1}\Sigma_{\eta}{\bf B}^T_{j-1} \tag{49} Σij=Aj−1Σij−1Aj−1T+Bj−1ΣηBj−1T(49)
C. Incorporating Bias Updates
之前的计算都是在bias恒定的假设下进行的,但这是不现实的。重新计算预积分值会耗费大量的资源,因此使用一阶展开式来计算在bias增加一个小量时的预积分值的更新。
Δ R ~ i j ( b ^ i g ) ≈ Δ R ~ i j ( b ‾ i g ) ⋅ E x p ( ∂ Δ R ‾ i j ∂ b ‾ g δ b i g ) Δ v ~ i j ( b ^ i g , b ^ i a ) ≈ Δ v ~ i j ( b ‾ i g , b ‾ i a ) + ∂ Δ v ‾ i j ∂ b ‾ g δ b i g + ∂ Δ v ‾ i j ∂ b ‾ a δ b i a Δ p ~ i j ( b ^ i g , b ^ i a ) ≈ Δ v ~ i j ( b ‾ i g , b ‾ i a ) + ∂ Δ p ‾ i j ∂ b ‾ g δ b i g + ∂ Δ p ‾ i j ∂ b ‾ a δ b i a (50) \Delta \tilde {\bf R}_{ij} ({\bf \hat b}^g_i )\approx\Delta \tilde {\bf R}_{ij} (\overline {\bf b}^g_i) \cdot {\rm Exp} \left( \frac{\partial \Delta \overline {\bf R}_{ij} }{\partial{\bf \overline b}^g} \delta{\bf b}^g_i \right) \\ \Delta \tilde {\bf v}_{ij} ({\bf \hat b}^g_i ,{\bf \hat b}^a_i) \approx\Delta \tilde {\bf v}_{ij} ({\bf \overline b}^g_i ,{\bf \overline b}^a_i)+\frac{\partial \Delta \overline {\bf v}_{ij} }{\partial{\bf \overline b}^g} \delta{\bf b}^g_i+\frac{\partial \Delta \overline {\bf v}_{ij} }{\partial \overline {\bf b}^a} \delta{\bf b}^a_i \\ \Delta \tilde {\bf p}_{ij} ({\bf \hat b}^g_i ,{\bf \hat b}^a_i) \approx \Delta \tilde {\bf v}_{ij} ({\bf \overline b}^g_i ,{\bf \overline b}^a_i)+\frac{\partial \Delta \overline {\bf p}_{ij} }{\partial{\bf \overline b}^g} \delta{\bf b}^g_i+\frac{\partial \Delta \overline {\bf p}_{ij} }{\partial \overline {\bf b}^a} \delta{\bf b}^a_i \tag{50} ΔR~ij(b^ig)≈ΔR~ij(big)⋅Exp(∂bg∂ΔRijδbig)Δv~ij(b^ig,b^ia)≈Δv~ij(big,bia)+∂bg∂Δvijδbig+∂ba∂ΔvijδbiaΔp~ij(b^ig,b^ia)≈Δv~ij(big,bia)+∂bg∂Δpijδbig+∂ba∂Δpijδbia(50)
为了求得雅克比系数,进行如下定义:
Δ R ^ i j = Δ R ~ i j ( b ^ i g ) , Δ R ‾ i j = Δ R ~ i j ( b ‾ i g ) Δ v ^ i j = Δ v ~ i j ( b ^ i g ) , Δ v ‾ i j = Δ v ~ i j ( b ‾ i g ) Δ p ^ i j = Δ p ~ i j ( b ^ i g ) , Δ p ‾ i j = Δ p ~ i j ( b ‾ i g ) (51) \Delta \hat {\bf R}_{ij}=\Delta \tilde {\bf R}_{ij} ({\bf \hat b}^g_i ) , \ \Delta \overline {\bf R}_{ij}=\Delta \tilde {\bf R}_{ij} ({\bf \overline b}^g_i ) \\ \Delta \hat {\bf v}_{ij}=\Delta \tilde {\bf v}_{ij} ({\bf \hat b}^g_i ) , \ \Delta \overline {\bf v}_{ij}=\Delta \tilde {\bf v}_{ij} ({\bf \overline b}^g_i ) \\ \Delta \hat {\bf p}_{ij}=\Delta \tilde {\bf p}_{ij} ({\bf \hat b}^g_i ) , \ \Delta \overline {\bf p}_{ij}=\Delta \tilde {\bf p}_{ij} ({\bf \overline b}^g_i ) \tag{51} ΔR^ij=ΔR~ij(b^ig), ΔRij=ΔR~ij(big)Δv^ij=Δv~ij(b^ig), Δvij=Δv~ij(big)Δp^ij=Δp~ij(b^ig), Δpij=Δp~ij(big)(51)
使用与式(32)和(43)相同的方法,推导得到
Δ R ^ i j = Δ R ~ i j ( b ^ i g ) = ∏ k = i j − 1 E x p ( ( ω ~ k − b i g ) Δ t ) = ∏ k = i j − 1 E x p ( ( ω ~ k − b ‾ i g − δ b i g ) Δ t ) = ∏ k = i j − 1 E x p ( ( ω ~ k − b ‾ i g ) Δ t ) E x p ( − J r k δ b i g Δ t ) = Δ R ‾ i j ∏ k = i j − 1 E x p ( − Δ R ~ k + 1 j ( b ‾ i ) T J r k δ b i g Δ t ) = Δ R ‾ i j E x p ( ∑ k = i j − 1 − Δ R ~ k + 1 j ( b ‾ i ) T J r k δ b i g Δ t ) (52) \begin{aligned} \Delta \hat {\bf R}_{ij}&=\Delta \tilde {\bf R}_{ij} ({\bf \hat b}^g_i ) \\ &=\prod_{k=i}^{j-1}\ {\rm Exp}((\tilde \omega_k-b_i^g)\Delta t) \\ &=\prod_{k=i}^{j-1}\ {\rm Exp}((\tilde \omega_k-\overline b_i^g - \delta b_i^g)\Delta t ) \\ &=\prod_{k=i}^{j-1}\ {\rm Exp}((\tilde \omega_k- \overline b_i^g)\Delta t) {\rm Exp}(-{\rm J}_r^k \delta{\bf b}^g_i\Delta t) \\ &=\Delta \overline {\bf R}_{ij} \prod_{k=i}^{j-1}{\rm Exp}(-\Delta \tilde {\bf R}_{k+1j}(\overline{\bf b}_i)^{\rm T} {\rm J}_r^k \delta{\bf b}^g_i\Delta t) \\ &=\Delta \overline {\bf R}_{ij}{\rm Exp}( \sum_{k=i}^{j-1} -\Delta \tilde {\bf R}_{k+1j}(\overline{\bf b}_i)^{\rm T} {\rm J}_r^k \delta{\bf b}^g_i\Delta t) \end{aligned} \tag{52} ΔR^ij=ΔR~ij(b^ig)=k=i∏j−1 Exp((ω~k−big)Δt)=k=i∏j−1 Exp((ω~k−big−δbig)Δt)=k=i∏j−1 Exp((ω~k−big)Δt)Exp(−JrkδbigΔt)=ΔRijk=i∏j−1Exp(−ΔR~k+1j(bi)TJrkδbigΔt)=ΔRijExp(k=i∑j−1−ΔR~k+1j(bi)TJrkδbigΔt)(52)
将其代入 Δ p ^ i j , Δ v ^ i j \Delta \hat {\bf p}_{ij}, \ \Delta \hat {\bf v}_{ij} Δp^ij, Δv^ij之中,并对Exp进行一阶近似可推导出其它雅克比系数。
∂ Δ R ‾ i j ∂ b ‾ g = − ∑ k = i j − 1 [ Δ R ~ k + 1 j ( b ‾ i ) T J r k Δ t ] ∂ Δ v ‾ i j ∂ b ‾ a = − ∑ k = i j − 1 Δ R ‾ i k Δ t ∂ Δ v ‾ i j ∂ b ‾ g = − ∑ k = i j − 1 Δ R ‾ i k ( a ‾ k − b ‾ i a ) ∧ ∂ Δ R ‾ i k ∂ b ‾ g Δ t ∂ Δ p ‾ i j ∂ b ‾ a = ∑ k = i j − 1 ∂ Δ v ‾ i k ∂ b ‾ a Δ t − 1 2 Δ R ‾ i k Δ t 2 ∂ Δ p ‾ i j ∂ b ‾ g = ∑ k = i j − 1 ∂ Δ p ‾ i k ∂ b ‾ g Δ t − 1 2 Δ R ‾ i k ( a ‾ k − b ‾ i a ) ∧ ∂ Δ R ‾ i k ∂ b ‾ g Δ t 2 \begin{aligned} \frac{\partial \Delta \overline {\bf R}_{ij} }{\partial{\bf \overline b}^g} &=-\sum_{k=i}^{j-1}[ \Delta \tilde {\bf R}_{k+1j}(\overline{\bf b}_i)^{\rm T} {\rm J}_r^k \Delta t] \\ \frac{\partial \Delta \overline {\bf v}_{ij} }{\partial{\bf \overline b}^a} &= -\sum_{k=i}^{j-1}\Delta \overline {\bf R}_{ik} \Delta t \\ \frac{\partial \Delta \overline {\bf v}_{ij} }{\partial{\bf \overline b}^g} &= -\sum_{k=i}^{j-1}\Delta \overline {\bf R}_{ik}(\overline {\bf a}_k-\overline{\bf b}_i^a)^\wedge \frac{\partial \Delta \overline {\bf R}_{ik} }{\partial \overline {\bf b}^g}\Delta t \\ \frac{\partial \Delta \overline {\bf p}_{ij} }{\partial{\bf \overline b}^a} &= \sum_{k=i}^{j-1} \frac{\partial \Delta \overline {\bf v}_{ik} }{\partial \overline {\bf b}^a}\Delta t- \frac{1}{2}\Delta \overline {\bf R}_{ik} \Delta t^2 \\ \frac{\partial \Delta \overline {\bf p}_{ij} }{\partial{\bf \overline b}^g} &= \sum_{k=i}^{j-1} \frac{\partial \Delta \overline {\bf p}_{ik} }{\partial \overline {\bf b}^g}\Delta t- \frac{1}{2}\Delta \overline {\bf R}_{ik}(\overline {\bf a}_k-\overline{\bf b}_i^a)^\wedge \frac{\partial \Delta \overline {\bf R}_{ik} }{\partial \overline {\bf b}^g}\Delta t^2 \end{aligned} ∂bg∂ΔRij∂ba∂Δvij∂bg∂Δvij∂ba∂Δpij∂bg∂Δpij=−k=i∑j−1[ΔR~k+1j(bi)TJrkΔt]=−k=i∑j−1ΔRikΔt=−k=i∑j−1ΔRik(ak−bia)∧∂bg∂ΔRikΔt=k=i∑j−1∂ba∂ΔvikΔt−21ΔRikΔt2=k=i∑j−1∂bg∂ΔpikΔt−21ΔRik(ak−bia)∧∂bg∂ΔRikΔt2
D. Preintegrated IMU Factors
预积分测量模型使用了大量的一阶近似和高斯分布近似,因此存在残差。残差是预积分的计算值(使用非IMU方法,如视觉)与测量值之间的差。优化最终的目的就是通过调整(lifting)导航状态使残差(的加权范数)最小化。
根据公式(39)可以得到残差的定义:
r I i j ≐ [ r Δ R i j T , r Δ v i j T , r Δ p i j T ] T ∈ R 9 (53) {\bf r}_{\mathcal I_{ij}} \doteq [{\bf r}^{\rm T}_{\Delta {\bf R}_{ij}},\ {\bf r}^{\rm T}_{\Delta {\bf v}_{ij}}, \ {\bf r}^{\rm T}_{\Delta {\bf p}_{ij}}]^{\rm T} \in \R^9 \tag{53} rIij≐[rΔRijT, rΔvijT, rΔpijT]T∈R9(53)
r Δ R i j ≐ L o g ( ( Δ R ~ i j ( b ‾ i g ) ⋅ E x p ( ∂ Δ R ‾ i j ∂ b ‾ g δ b i g ) ) T R i T R j ) = L o g [ ( Δ R ^ i j ) T Δ R i j ] r Δ v i j ≐ R i T ( v j − v i − g Δ t i j ) − [ Δ v ~ i j ( b ‾ i g , b ‾ i a ) + ∂ Δ v ‾ i j ∂ b ‾ g δ b i g + ∂ Δ v ‾ i j ∂ b ‾ a δ b i a ] = Δ v i j − Δ v ^ i j r Δ p i j ≐ R i T ( p j − p i − v i Δ t i j − 1 2 g Δ t i j 2 ) − [ Δ p ~ i j ( b ‾ i g , b ‾ i a ) + ∂ Δ p ‾ i j ∂ b ‾ g δ b i g + ∂ Δ p ‾ i j ∂ b ‾ a δ b i a ] = Δ p i j − Δ p ^ i j (54) \begin{aligned} {\bf r}_{\Delta {\bf R}_{ij}} &\doteq {\rm Log}\left( \left(\Delta \tilde {\bf R}_{ij} (\overline {\bf b}^g_i) \cdot {\rm Exp} \left( \frac{\partial \Delta \overline {\bf R}_{ij} }{\partial{\bf \overline b}^g} \delta{\bf b}^g_i \right) \right)^{\rm T} {\bf R}_i^{\rm T}{\bf R}_j \right) \\ &= {\rm Log} [(\Delta \hat {\bf R}_{ij})^T\Delta {\bf R}_{ij}]\\ \\ {\bf r}_{\Delta {\bf v}_{ij}} &\doteq {\bf R}_i^T({\bf v}_j-{\bf v}_i-{\bf g}\Delta t_{ij}) \\ &- \left[\Delta \tilde {\bf v}_{ij} ({\bf \overline b}^g_i ,{\bf \overline b}^a_i)+\frac{\partial \Delta \overline {\bf v}_{ij} }{\partial{\bf \overline b}^g} \delta{\bf b}^g_i+\frac{\partial \Delta \overline {\bf v}_{ij} }{\partial \overline {\bf b}^a} \delta{\bf b}^a_i \right]\\ &= \Delta {\bf v}_{ij} -\Delta \hat {\bf v}_{ij}\\ \\ {\bf r}_{\Delta {\bf p}_{ij}} &\doteq {\bf R}_i^T({\bf p}_j-{\bf p}_i-{\bf v}_i \Delta t_{ij}-\frac{1}{2}{\bf g}\Delta t_{ij}^2) \\ &- \left[\Delta \tilde {\bf p}_{ij} ({\bf \overline b}^g_i ,{\bf \overline b}^a_i)+\frac{\partial \Delta \overline {\bf p}_{ij} }{\partial{\bf \overline b}^g} \delta{\bf b}^g_i+\frac{\partial \Delta \overline {\bf p}_{ij} }{\partial \overline {\bf b}^a} \delta{\bf b}^a_i \right] \\ &=\Delta {\bf p}_{ij} - \Delta \hat {\bf p}_{ij} \end{aligned} \tag{54} rΔRijrΔvijrΔpij≐Log((ΔR~ij(big)⋅Exp(∂bg∂ΔRijδbig))TRiTRj)=Log[(ΔR^ij)TΔRij]≐RiT(vj−vi−gΔtij)−[Δv~ij(big,bia)+∂bg∂Δvijδbig+∂ba∂Δv