基于Kalman filter 的北斗卫星三维坐标后数据处理
Kalman filter 基本介绍
- 1. 应用场景?
模型内事件状态转换是线性的,噪声干扰是高斯的
公式表示:
P(Xt|Xt-1)=N(AX+B,Q) Xt=AXt-1+B+W
P(Yt|Xt)=N(HX+C,R) Yt=HX+C+V W ,V meet Normal distribution( 0,sigma)
制定H ,降维 我们只需要某一个维度状态
P(Xt|Y1,Y2,….Yt)

- 2. Kalman filter求什么?
求(Xt|Y1*Y2*Y3….Yt)的性质。
Xt是某事物t时刻真实的状态。Yt是t时刻观察事物状态的观测值。
我们已知前t个的时刻的观测值, 计算t时刻 隐状态的某些 参数。
比如概率P,均值E(Xt_bar),方差Var(Xt_bar)。
3.基本思想:
没有真值, 只有传感器的观测值,具有对目标系统建立数学模型获得预期值。
我们要用预期值和观测值来逼近真值。
举个例子:
蓝色的模型预期值,红色的传感器的值,我们通过把两个正态分布乘起来,计算概率密度函数的均值,来寻找最佳估计。
为什么是乘(1*1=1)? 为什么能乘(∫fdx=1)?
4.算法步骤
4.1列方程模型
匀速直线运动+干扰, (静止则速度为0),模型中的加速度和速度不是恒定的,是参数迭代计算出来的。
初值是我们定义的。 但是初值作用不是很大,经过少量迭代即可趋于稳定。
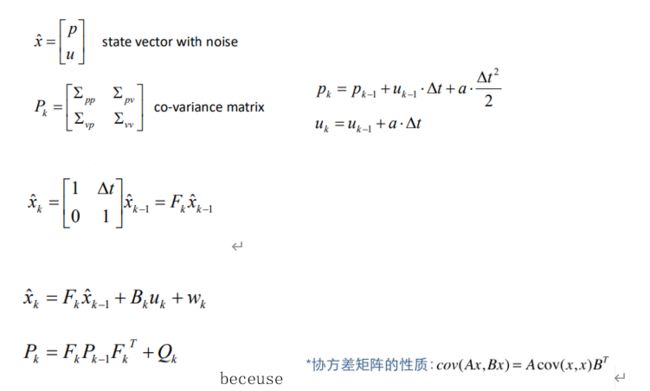
P是FX的协方差矩阵,
Qk是状态转移协方差矩阵。联系两个连续离散时刻的协方差矩阵(实际上是噪声Δw的协方差矩阵,后面说明),Qk参数可以以自己调节。
F是两个连续时刻状态的过渡矩阵。,wk是扰动。
4.2 寻找迭代 闭环
如何保证能算法收敛?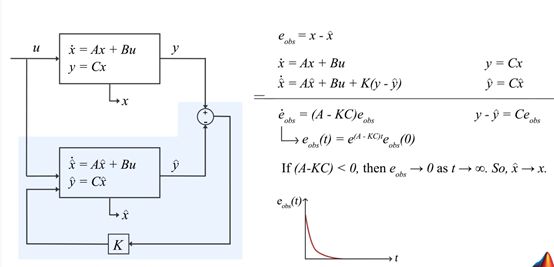
u为输入,y输出模型预期值。Y_hat是 真实传感器的值。
收敛的条件:调整KC使得A-KC小于0,指数函数就会随着时间收敛。

我把K取值为负数。结果误差是7*10^304 mm
我们写出P(xt|y1:t-1),P(xt|y1:t)的值。
为什么要写这个P(xt|y1:t-1)P(xt|y1:t)?HMM,当转移矩阵,测量矩阵,初始概率确定后,模型就确定的。我们写出P(xt|y1:t-1),P(xt|y1:t)是量化。

公式(2),冒号代表从1到t-1,
p(xt|y1:t−1)代表预测,已知t-1时刻的观测值,求xt时刻的状态。
当有了p(yt|xt)中的yt 后,就可以对p(xt|y1:t)中的 Xt实现更新。
注意prediction 中 p(xt|y1:t) 与 p(xt|y1:t−1)已经 实现递归
p(xt|y1:t−1)满足高斯分布,p(yt|xt)满足高斯分布,高斯乘以高斯结果还是高斯分布。所以p(xt|y1:t)也是高斯的。
说明算法处理同一组数据,结果只能限定在一个范围内,绝对没有一组数据是结果一样的。
实际上:t=1时刻有 P(X1|Y1)~N(μ_hat_1,sigma_hat_1) update
t=2时刻有 P(X2|Y1)~N(μ_bar_2,sigma_bar_2) prediction
P(X2|Y1,Y2)~N(μ_bar_2,sigma_bar_2) update
同样的:t时刻
P(Xt|Y1,Y2,,,Yt)~ N(μ_hat_t,sigma_hat_t) update
P(Xt|Y1:Yt)~N(μ_bar_t,sigma_bar_t)) prediction
我们要做什么?把参数设置好了时候,每次不断求update 和prediction的值,
也就是如何从上一次高斯的两个参数mean和var,得到下一次高斯的两个参数mean和var。
分别对随机变量X和线性变换后的随机变量AX计算mean和var。

Q噪声的Δw的协方差矩阵,是Δw,不是w的协方差,所以不为0。
Q我在计算时取为定值。(实际上不应该是定值)噪声一定会变,可是我没办法预估。
通过观测定值效果也很不错。我已经把结果震荡限制在1mm内。
有了P(xt|y1:t-1),P(xt|y1:t)后,就可以求t时刻状态值的mean和var。
第一种计算方法:
另一种计算的方法:
思路相同:利用模型预期值和测量值,来寻找最佳估计值
已知状态的Xt,观测的Yt,边缘分布。
如何求Xt,Yt的边缘分布呢?--结果显然是高斯的。查表套公式即可。
求出XY期望的mean和var ,
同样的还是会得到这三个公式。
实际上是mean和var两个公式。
(注意K是被推导的)只不过要查表应用随机变量乘积的高斯分布获取乘积的pdf。
4.3迭代更新。
4.4 观测滤波结果,不符合预期则调整参数

- 中值滤波数据预处理,
- 计算预处理后的标准差 ,作为加入噪声的参考值,使用计算预处理后的均值,作为代替真值的参考值(大样本均值思想)
- 设置模型初始条件,设置参数,模型确定了,P,H参数是固定的。F中第一行第二个元素是时间,我对照表格取一分钟,F的其他参数也是固定的。联系两个FX的协方差的矩阵Q的取值很大程度影响误差,R是调整预期值与传感器值权重的参数,相信预期值多,则把R调小些,反之亦反。
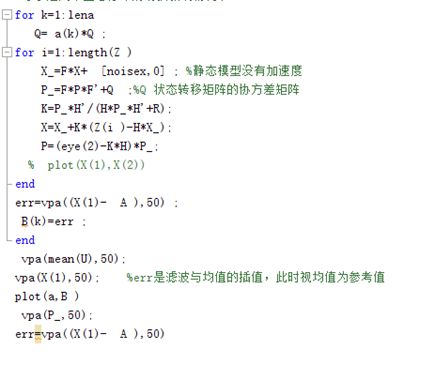
- 开始迭代,输入卡拉曼滤波公式,开始接待计算误差。
- 目前参数我已经调整到 把结果稳定在了1mm内
- 部分结果展示,经过少量迭代,结果趋于稳定。

横轴是位置,纵轴是速度,很明显,速度是非常接近0.
- 同时也观察不同Q值对误差影响,Q值建议调成大于1

计划:进行实时数据检验算法准确性,效果不佳,尝试非线性非高斯粒子滤波。
考虑到天气等原因影响,尝试使用参数学习,找出最佳参数,实现参数自适应。
欢迎大家随时打断我,感谢大家提出自己的见解!