【Matlab Computer Vision System ToolBox】学习笔记-2-3D立体图创建 | 视差图 | 3D点云图
本系列博客将介绍Matlab中机器视觉工具箱的应用,部分案例,主要关于点云处理方面,更多内容见Matlab官方文档。如有翻译错误请批评指正!所有代码经自己运行测试通过。
【Matlab Computer Vision System ToolBox】学习笔记-1-点云配准流程 | 特征匹配
【Matlab Computer Vision System ToolBox】学习笔记-2-3D立体图创建 | 视差图 | 3D点云图
【Matlab Computer Vision System ToolBox】学习笔记-3 -点云配准 | 噪音去除 | 降采样
【Matlab Computer Vision System ToolBox】学习笔记-4 -点云文件PLY格式
英文原版下载地址
1. Create 3-D Stereo Display -创建3D立体图
>> load('webcamsSceneReconstruction.mat'); //导入双目标定的结果文件 >> I1=imread('sceneReconstructionLeft.jpg'); //导入左右图像 >> I2=imread('sceneReconstructionRight.jpg'); >> [J1,J2]=rectifyStereoImages(I1,I2,stereoParams); //立体矫正 >> A=stereoAnaglyph(J1,J2); //创建立体图 >> figure; >> imshow(A);
2. Reconstruct 3-D Scene from Disparity Map -从视差图中重建3D场景
>> load('webcamsSceneReconstruction.mat'); >> I1=imread('sceneReconstructionLeft.jpg'); >> I2=imread('sceneReconstructionRight.jpg'); >> [J1,J2]=rectifyStereoImages(I1,I2,stereoParams); >> figure; >> imshow(cat(3,J1(:,:,1),J2(:,:,2:3)),'InitialMagnification',50); //合并矩阵并显示,效果同上stereoAnaglyph
>> disparityMap=disparity(rgb2gray(J1),rgb2gray(J2)); //计算视差 >> figure >> imshow(disparityMap,[0,64],'InitialMagnification',50); //adjust the display range [0,64]

当把上述的 [0,64] 改成 [0,255] 后显示效果如下:
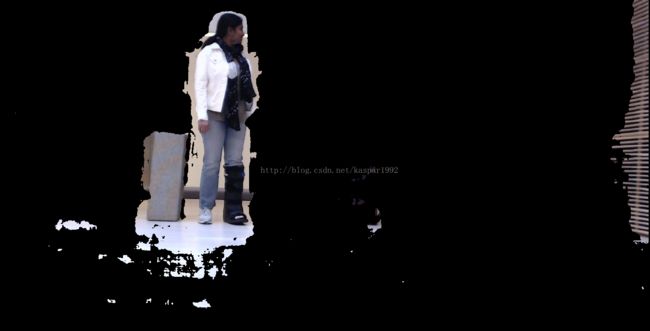
从视差图中计算像素在世界坐标系中的位置,并把距离摄像机3.2米到3.7米的区域分割出来。
>> xyzPoints=reconstructScene(disparityMap,stereoParams); >> Z=xyzPoints(:,:,3); >> mask=repmat(Z>3200 & Z<3700,[1,1,3]); >> J1(~mask)=0; >> imshow(J1,'InitialMagnification',50);
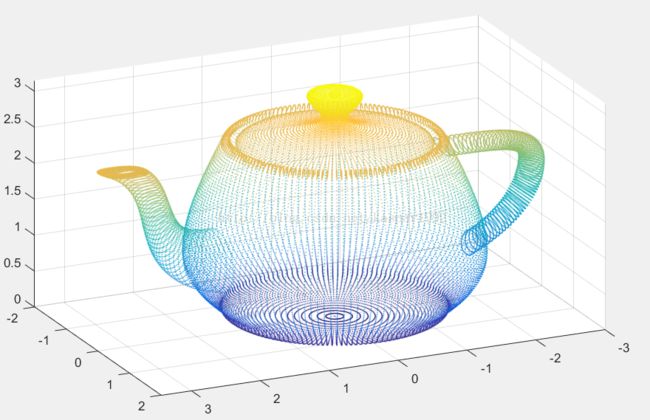
3. Read Point Cloud from a PLY File -读入点云数据
>> ptCloud=pcread('teapot.ply'); >> pcshow(ptCloud);
点云是以 ply 结尾的数据格式存储,具体点云数据 ply 见后文。可对点云可视化图进行放大缩小旋转等操作。
同时可将3D点云数据写入 PLY 文件。如果显示没有写入权限,则关闭Matlab,用管理员权限打开。
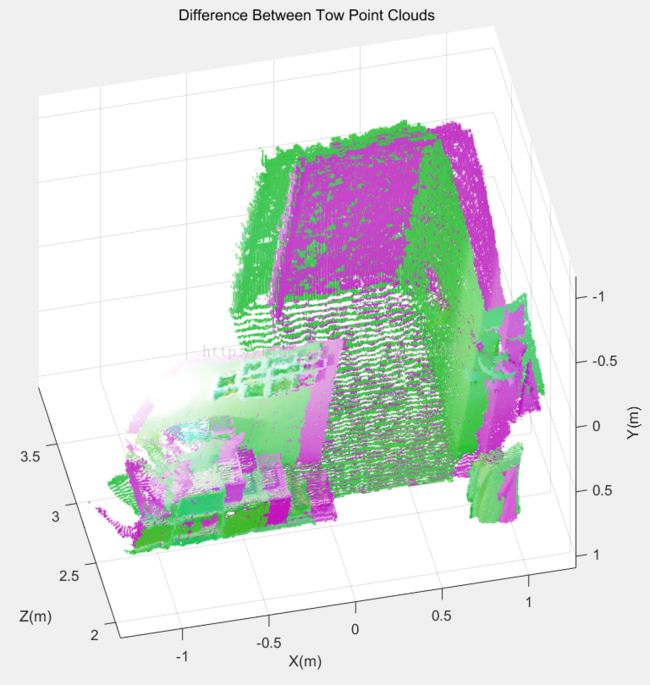
pcwrite(ptCloud,'teapotOut','PLYFormat','binary');4. Visualize the Difference Between Two Point Clouds -可视化观察两个点云的区别
>> load('livingRoom'); //88个点云数组集 >> pc1=livingRoomData{1}; >> pc2=livingRoomData{2}; // 取前2组点云 >> figure; >> pcshowpair(pc1,pc2,'VerticalAxis','Y','VerticalAxisDir','Down'); //显示点云 >> title('Difference Between Tow Point Clouds') >> xlabel('X(m)'); >> ylabel('Y(m)'); >> zlabel('Z(m)');
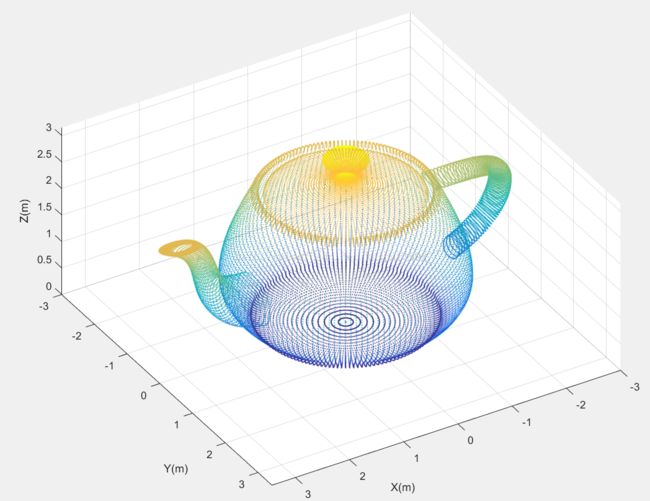
5. View Rotating 3-D Point Cloud
>> pcCloud=pcread('teapot.ply'); >> x=pi/180; >> R=[cos(x) sin(x) 0 0;-sin(x) cos(x) 0 0;0 0 1 0;0 0 0 1]; >> tform=affine3d(R); //定义旋转矩阵和3D平移 >> lower=min([pcCloud.XLimits pcCloud.YLimits]); >> upper=max([pcCloud.XLimits pcCloud.YLimits]); >> xlimits=[lower upper]; >> ylimits=[lower upper]; >> zlimits=pcCloud.ZLimits; //找出xy的最小最大值,防止不被显示 >> player=pcplayer(xlimits,ylimits,zlimits); >> xlabel(player.Axes,'X(m)'); >> ylabel(player.Axes,'Y(m)'); >> zlabel(player.Axes,'Z(m)'); >> for i=1:360 //以Z轴旋转 ptCloud=pctransform(pcCloud,tform); view(player,pcCloud); end