PX4固件通过UART连接串口读取超声波,和树莓派3通信
添加串口读取程序
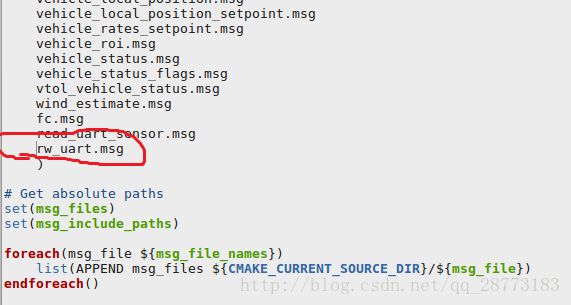
首先在Firmware/msg文件夹下添加rw_uart.msg
char[5] datastr
int16 data
#TOPICS rw_uart记住在这一文件夹下的CMakeLists.txt下注册这个msg,添加rw_uart.msg即可。
上面的文件make之后会自动产生rw_uart.h头文件,里面会有结构体rw_uart_s,存取了我们刚才定义的data和datastr。然后在Firmware/src/module文件夹下新建文件夹rw_uart,在里面添加CMakeLists.txt和rw_uart.c。
CMakeLists.txt内容如下:
set(MODULE_CFLAGS)
px4_add_module(
MODULE modules__rw_uart
MAIN rw_uart
COMPILE_FLAGS
-Os
SRCS
rw_uart.c
DEPENDS
platforms__common
)读取程序rw_uart.c如下:
#include 超声波和px4的硬件连接
首先说一下,这里用的是pixhawk的TELEM2口,TELEM1接口给的是数传。TELEM1和TELEM2接口是一样的,分布如下:
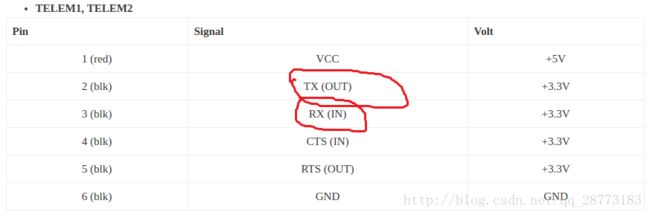
对于UART主要是TX,RX,VCC,GND这四个接口,这里面我用的是HC-SRO4超声波传感器,这个传感器给的是触发信号,并没有直接给出距离,需要自己通过计时器来获得距离,这个找度娘就可以了,这里验证的是能读到数据。TELEM2和超声波的连接方式:VCC-VCC,TX-RX,RX-TX,GND-GND,这里我的超声波的连接是:TX-Trigger,RX-Echo。最后的结果如下:
这里我使用的是数据订阅的方式——uORB通信机制
在Firmware/src/examples/px4_simple_app文件夹下,修改px4_simple_app.c如下:
/****************************************************************************
*
* Copyright (c) 2012-2015 PX4 Development Team. All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* 1. Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
* 2. Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in
* the documentation and/or other materials provided with the
* distribution.
* 3. Neither the name PX4 nor the names of its contributors may be
* used to endorse or promote products derived from this software
* without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
* OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
* AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
* POSSIBILITY OF SUCH DAMAGE.
*
****************************************************************************/
/**
* @file px4_simple_app.c
* Minimal application example for PX4 autopilot
*
* @author Example User @example.com>
*/
#include 树莓派3和pixhawk通信
树莓派和pixhawk的连接如下:
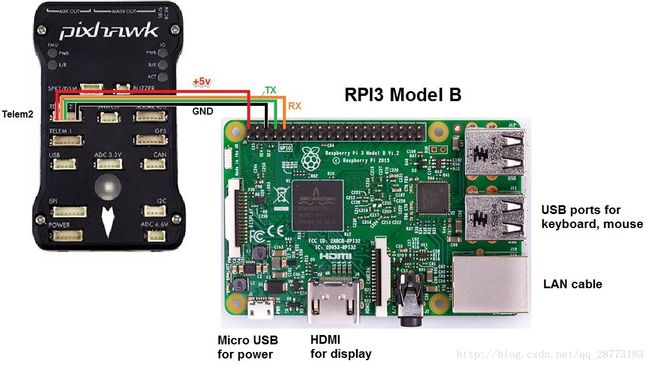
这里切记不要把VCC和GND的GPIO口接反了,很容易把树莓派的CPU 烧了(我就烧了一次),如果都供电了,建议就不要连接两者之间的VCC。树莓派的发送程序如下:
#include
#include
int main()
{
int fd;
char data[5]=“R1100”;
int flag=1;
if(wiringPiSetup()<0)return 1;
if((fd=serialOpen("/dev/ttyAMA0",9600))<0) return 1;
printf("serial test start ...\n");
serialPrintf(fd,"Hello world!\n");
while(flag)
{
serialPrintf(fd,data);//向串口设备发送data数据
delay(300);
while(serialDataAvail(fd))
{
printf("->%3d\n",serialGetchar(fd));
flag=0; fflush(stdout);
}
}
serialFlush(fd);
serialClose(fd);
return 0;
} 首先需要说一下,这个串口发送程序需要安装wiringPi库,编译运行命令如下:
gcc –Wall uart.c –o uart –lwiringPi
sudo ./uart
这几天坑埋完了,上各种博客链接:
树莓派和pixhawk连接
struct termios结构体详解
树莓派串口发送数据
PX4原生固件添加串口读取传感器