ORB SLAM2学习笔记之mono_kitti(四)
ORB SLAM2学习笔记之mono_kitti(四)
- 探索Track函数之MonocularInitialization(单目初始化)
- 第一次进函数
- 第二次进函数
- Initialize函数
- 剔除没有三角化的点
- 设置帧的Pose
- CreateInitialMapMonocular()
- 第一步:将初始帧和当前帧转化成关键帧,KeyFrame类是关键帧类:
- 第二步:将初始和当前关键帧的描述子转为BoW
- 第三步:将关键帧插入到地图
- 第四步:将3D点包装成MapPoints
- 第五步:更新连接关系
- 第六步:全局优化
- 第七步:中值深度归一化
- 第八步:收尾工作,参数交接
探索Track函数之MonocularInitialization(单目初始化)
Tracking.cpp里面的Track()函数可以说是 Tracking 线程最主体部分了,来看看调用Track()函数的过程:

Tracking线程中初始化函数用的是MonocularInitialization(),在第一次进入这个函数之前,初始化了mpInitializer(单目初始器)赋值为null,所以一开始会进入下面的if语句:
void Tracking::MonocularInitialization()
{
//(第一次进入函数时)初始化tracking时赋了null
//(第二次进入函数时)第一次新建了mpInitializer,所以执行else
if(!mpInitializer)
{
// Set Reference Frame
// 单目初始帧的特征点数必须大于100
if(mCurrentFrame.mvKeys.size()>100)
{
//初始化mono的时候,初始帧和上一帧都是当前帧赋值
mInitialFrame = Frame(mCurrentFrame);
mLastFrame = Frame(mCurrentFrame);
// mvbPrevMatched最大的情况就是所有特征点都被跟踪上
mvbPrevMatched.resize(mCurrentFrame.mvKeysUn.size());
for(size_t i=0; i<mCurrentFrame.mvKeysUn.size(); i++)
mvbPrevMatched[i]=mCurrentFrame.mvKeysUn[i].pt;
if(mpInitializer)
delete mpInitializer;
// 这里实例化Initialize类的一个对象指针,初始化的值为选取的当前帧和测量误差1.0,RANSAC迭代次数200
mpInitializer = new Initializer(mCurrentFrame,1.0,200);
fill(mvIniMatches.begin(),mvIniMatches.end(),-1); //先都填上-1 现在还没匹配呢
return;
}
}
第二次进入这个函数的时候已经创建了一个mpInitializer,所以会进入else语句:
else
{
// Try to initialize
if((int)mCurrentFrame.mvKeys.size()<=100)
{
delete mpInitializer;
mpInitializer = static_cast<Initializer*>(NULL);
fill(mvIniMatches.begin(),mvIniMatches.end(),-1);
return;
}
// Find correspondences
ORBmatcher matcher(0.9,true);
// mvbPrevMatched为前一帧的特征点,存储了mInitialFrame中哪些点将进行接下来的匹配
// mvIniMatches存储mInitialFrame,mCurrentFrame之间匹配的特征点,键值对是两帧匹配特征点的索引
// mvbPrevMatched,mvIniMatches获得更新
int nmatches = matcher.SearchForInitialization(mInitialFrame,mCurrentFrame,mvbPrevMatched,mvIniMatches,100);
// Check if there are enough correspondences
if(nmatches<100)
{
delete mpInitializer;
mpInitializer = static_cast<Initializer*>(NULL);
return;
}
cv::Mat Rcw; // Current Camera Rotation
cv::Mat tcw; // Current Camera Translation
vector<bool> vbTriangulated; // Triangulated Correspondences (mvIniMatches)
//如果初始化成功,intializer得到Rcw, tcw
if(mpInitializer->Initialize(mCurrentFrame, mvIniMatches, Rcw, tcw, mvIniP3D, vbTriangulated))
{
for(size_t i=0, iend=mvIniMatches.size(); i<iend;i++)
{
if(mvIniMatches[i]>=0 && !vbTriangulated[i])
{
mvIniMatches[i]=-1;
nmatches--;
}
}
// Set Frame Poses 初始帧也就是第一帧为世界坐标系,所以无需旋转平移
mInitialFrame.SetPose(cv::Mat::eye(4,4,CV_32F));
cv::Mat Tcw = cv::Mat::eye(4,4,CV_32F);
//Tcw赋值给mCurrentFrame
Rcw.copyTo(Tcw.rowRange(0,3).colRange(0,3));
tcw.copyTo(Tcw.rowRange(0,3).col(3));
mCurrentFrame.SetPose(Tcw);
// 将三角化得到的3D点包装成MapPoints
// Initialize函数会得到mvIniP3D,
// mvIniP3D是cv::Point3f类型的一个容器,是个存放3D点的临时变量,
// CreateInitialMapMonocular将3D点包装成MapPoint类型存入KeyFrame和Map中
CreateInitialMapMonocular();
}
}
}
第一次进函数
先看if里面的,利用当前帧 mCurrentFrame创建了两个Frame对象,分别是 mInitialFrame(初始帧)和 mLastFrame(上一帧),课可见一开始的时候,上一帧就是当前帧。
mInitialFrame = Frame(mCurrentFrame);
mLastFrame = Frame(mCurrentFrame);
mvIniMatches用于存储 mInitialFrame, mCurrentFrame之间匹配的特征点,键值对是两帧匹配特征点的索引,所以初始化 mpInitializer后还要给 mvIniMatches填上 -1,以记录现在还未初始化。
第二次进函数
第二次进函数就已经有了两帧图像了,分别是 mInitialFrame(初始帧第一帧), mCurrentFrame(当前帧第二帧),有些细节比如判特征点数量的之类的就不说了,接下来初始化一个matcher,用于匹配,参数分别为mfNNratio(匹配分数设置)和mbCheckOrientation(要不要检查方向)。接下来开始匹配,函数最后得到的nmatches记录了匹配数:
int nmatches = matcher.SearchForInitialization(mInitialFrame,mCurrentFrame,mvbPrevMatched,mvIniMatches,100);
参数:mvbPrevMatched为前一帧的特征点,存储了mInitialFrame中哪些点将进行接下来的匹配。mvIniMatches存储 mInitialFrame, mCurrentFrame之间匹配的特征点,键值对是两帧匹配特征点的索引。
好,接下来mpInitializer要开始初始化了:
mpInitializer->Initialize(mCurrentFrame, mvIniMatches, Rcw, tcw, mvIniP3D, vbTriangulated
mpintializer初始化后,如果成功,会得到Rcw(旋转阵), tcw(平移向量), mvIniP3D(地图点的三维信息),成功后会进入一个if语句中,这个先不谈,先看这个Initialize函数:
Initialize函数
Initialize函数属于Initializer类,这是一个跟初始化相关的类,函数大致是讲计算 基础矩阵(F) 和 单应性矩阵(H),然后选取其中一个模型,恢复出最开始两帧之间的相对姿态以及3d点。主要的步骤是下面这些:
① 组织特征点对:
mvMatches12.reserve(mvKeys2.size()); //mvKeys2:当前帧特征点
mvbMatched1.resize(mvKeys1.size()); //mvKeys1:参考帧特征点
for(size_t i=0, iend=vMatches12.size();i<iend; i++)
{
if(vMatches12[i]>=0)
{
mvMatches12.push_back(make_pair(i,vMatches12[i]));
mvbMatched1[i]=true;
}
else
mvbMatched1[i]=false;
}
// 匹配上的特征点的个数
const int N = mvMatches12.size();
// Indices for minimum set selection
// 新建一个容器vAllIndices,生成0到N-1的数作为特征点的索引
vector<size_t> vAllIndices;
vAllIndices.reserve(N);
vector<size_t> vAvailableIndices;
for(int i=0; i<N; i++)
{
vAllIndices.push_back(i);
}
vMatches12就是前面说的 mvIniMatches,而 mvMatches12则是装了一个个 初始、当前帧的match 的 vector。vAllIndices 是装了所有match的索引(一个索引对应一个pair)
② 在所有匹配特征点对中随机选择8对匹配特征点:
mvSets = vector< vector<size_t> >(mMaxIterations,vector<size_t>(8,0));
DUtils::Random::SeedRandOnce(0);
for(int it=0; it<mMaxIterations; it++)
{
vAvailableIndices = vAllIndices;
// Select a minimum set
for(size_t j=0; j<8; j++)
{
int randi = DUtils::Random::RandomInt(0,vAvailableIndices.size()-1);
int idx = vAvailableIndices[randi];
mvSets[it][j] = idx;
vAvailableIndices[randi] = vAvailableIndices.back();
vAvailableIndices.pop_back();
}
}
迭代赋值,采取RANSAC的方法每组随机取八个点,取mMaxIterations组。mvSets是一个装有mMaxIterations这么多个vector的vector,它装载的vector中是随机的八个点的索引。
③ 调用多线程分别用于计算fundamental matrix 和 homography
vector<bool> vbMatchesInliersH, vbMatchesInliersF;
float SH, SF;
cv::Mat H, F;
thread threadH(&Initializer::FindHomography,this,ref(vbMatchesInliersH), ref(SH), ref(H));
thread threadF(&Initializer::FindFundamental,this,ref(vbMatchesInliersF), ref(SF), ref(F));
// Wait until both threads have finished
threadH.join();
threadF.join();
// Compute ratio of scores
float RH = SH/(SH+SF);
// Try to reconstruct from homography or fundamental depending on the ratio (0.40-0.45)
if(RH>0.40)
return ReconstructH(vbMatchesInliersH,H,mK,R21,t21,vP3D,vbTriangulated,1.0,50); //得到R21,t21
else //if(pF_HF>0.6)
return ReconstructF(vbMatchesInliersF,F,mK,R21,t21,vP3D,vbTriangulated,1.0,50); //得到R21,t21
利用FindHomography和FindFundamental多线程计算H和F,RH是两个矩阵的评分,高于一个阈值就选用其中的一个。ReconstructH 和 ReconstructF利用之前得到的H和F解算位姿R21,t21,并三角化计算3d点vP3D,看了一下代码结构,vP3D这个量应该是第一帧初始帧下的坐标,但这时相机光心坐标设置为0,所以vP3D应该是世界坐标。
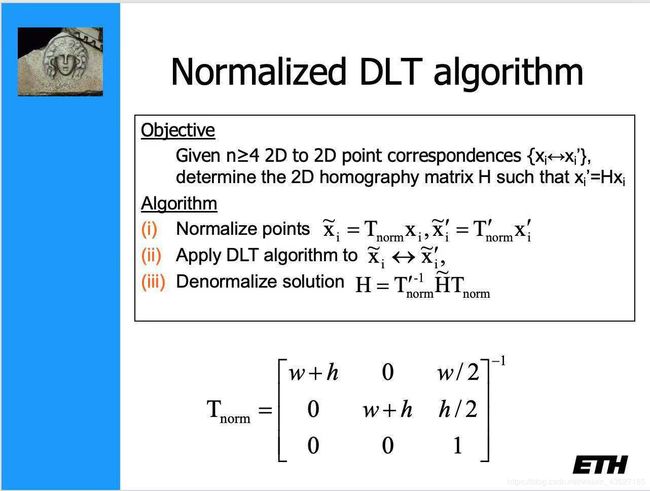
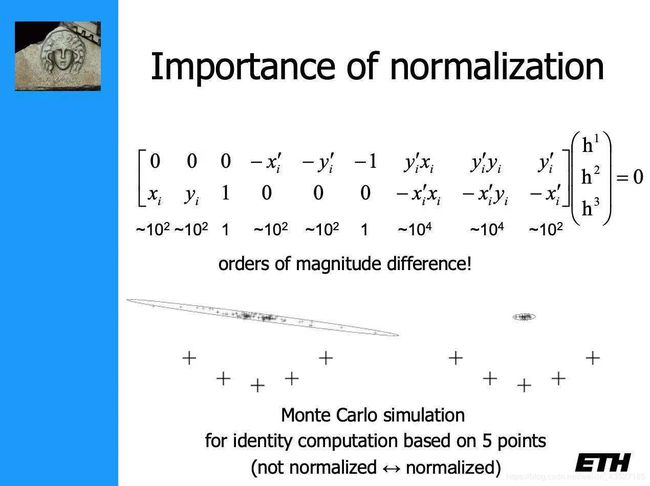
FindHomography中运用了个技巧——归一化直接线性计算(Normalized DLT),下面是MVG的PPT上讲的算法流程:
之前对这个归一化疑惑了很久参考了一下PPT,好像是蒙特卡洛仿真效果比较好见下图。路过的大神能稍微解释一下吗~~
FindFundamental就没仔细看了。。。反正就是算F矩阵呗。。太菜了看不懂不看了。。
至此,Initialize 函数任务完成,得到了两帧之间的相对姿态以及3d点坐标和每个点三角化的成功与否的vector。
剔除没有三角化的点
当Initialize 函数执行完并且return true后,进入if语句,首先进行的是根据返回的 vbTriangulated 剔除没有三角化成功的点。
for(size_t i=0, iend=mvIniMatches.size(); i<iend;i++)
{
if(mvIniMatches[i]>=0 && !vbTriangulated[i])
{
mvIniMatches[i]=-1;
nmatches--;
}
}
设置帧的Pose
详情见注释
// Set Frame Poses
// 将初始化的第一帧作为世界坐标系,因此第一帧变换矩阵为单位矩阵
mInitialFrame.SetPose(cv::Mat::eye(4,4,CV_32F));
// 由Rcw和tcw构造Tcw,并赋值给mTcw,mTcw为世界坐标系到该帧的变换矩阵
cv::Mat Tcw = cv::Mat::eye(4,4,CV_32F);
Rcw.copyTo(Tcw.rowRange(0,3).colRange(0,3));
tcw.copyTo(Tcw.rowRange(0,3).col(3));
mCurrentFrame.SetPose(Tcw);
CreateInitialMapMonocular()
经过上面不痛不痒的一些操作,接下来进入大头部分…根据三角化后的3d点进行MapPoints的包装。CreateInitialMapMonocular函数适合分段讲,层次比较清晰。
第一步:将初始帧和当前帧转化成关键帧,KeyFrame类是关键帧类:
KeyFrame* pKFini = new KeyFrame(mInitialFrame,mpMap,mpKeyFrameDB);
KeyFrame* pKFcur = new KeyFrame(mCurrentFrame,mpMap,mpKeyFrameDB);
包括各种参数的传递,传递格子grid的信息,设置关键帧的Pose。mpMap和mpKeyFrameDB在System初始化的时候已经new过了。
第二步:将初始和当前关键帧的描述子转为BoW
pKFini->ComputeBoW();
pKFcur->ComputeBoW();
第三步:将关键帧插入到地图
mpMap->AddKeyFrame(pKFini);
mpMap->AddKeyFrame(pKFcur); //mspKeyFrames获得更新
mspKeyFrames是一个set类,详情请见set类参考网站。
第四步:将3D点包装成MapPoints
for(size_t i=0; i<mvIniMatches.size();i++)
{
if(mvIniMatches[i]<0)
continue;
//Create MapPoint.
//mvIniP3D是第一张初始帧的相机坐标系下的点,由于第一个是世界坐标系所以就是世界坐标系下的点
cv::Mat worldPos(mvIniP3D[i]);
//用3D点构造MapPoint
MapPoint* pMP = new MapPoint(worldPos,pKFcur,mpMap);
// 初始帧一个 i 对应当前帧一个 mvIniMatches[i],都是索引
// 把用 mvIniP3D 初始化好的 MapPoint 分别送入初始帧和当前帧的 mvpMapPoints 中
pKFini->AddMapPoint(pMP,i);
pKFcur->AddMapPoint(pMP,mvIniMatches[i]);
// 对该MapPoint添加观测
pMP->AddObservation(pKFini,i);
pMP->AddObservation(pKFcur,mvIniMatches[i]);
// 从观测到该MapPoint的关键帧中挑选区分度最高的描述子
//更新该MapPoint平均观测方向以及观测距离的范围
pMP->ComputeDistinctiveDescriptors();
pMP->UpdateNormalAndDepth();
//Fill Current Frame structure
mCurrentFrame.mvpMapPoints[mvIniMatches[i]] = pMP;
mCurrentFrame.mvbOutlier[mvIniMatches[i]] = false;
//Add to Map
//在地图中添加该MapPoint
mpMap->AddMapPoint(pMP);
}
worldPos是之前Initialize函数得到的mvIniP3D,pMP是根据当前帧和 3d点worldPos 和地图mpMap初始化的MapPoint对象。
接下来的操作AddMapPoint 和 AddObservation都是pKFini和pKFcur一对一对进行操作的,即在关键帧中添加地图点,地图点选择能被哪个帧观测到。AddMapPoint中的重要参数mvpMapPoints根据索引记录了每个地图点。AddObservation中一个重要的参数是mObservations,是个map类,键值对为关键帧和mappoint的索引,如下表所示。
| keyframe | id |
|---|---|
| pKFini | i |
| pKFcur | mvIniMatches[i] |
然后是 ComputeDistinctiveDescriptors,函数计算最有代表性的描述子,先获得当前点的所有描述子,然后计算描述子之间的两两距离,最好的描述子与其他描述子应该具有最小的距离中值。UpdateNormalAndDepth 函数没细看,是更新平均观测方向和观测距离范围的。最后在map里添加地图点。
第五步:更新连接关系
pKFini->UpdateConnections();
pKFcur->UpdateConnections();
下图所示为权重连接示意图:
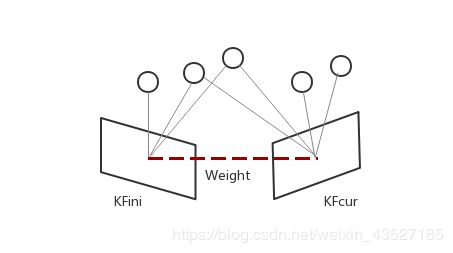
这个部分主要是用于利用各关键帧的共视程度(covisibility)建立帧与帧之间的连接关系。在关键帧和关键帧之间建立边,每个边有一个权重,边的权重是该关键帧与当前帧公共3D点的个数。首先,从调用这个函数的关键帧得到所有特征点,然后根据这些特征点mappoints得到观测值也就是之前提到的mObservations,函数中的 KFcounter 记录当前帧和与其他关键帧之间的权重的。vPairs 这个参数用于记录权重大于阈值的帧,一旦发现大于阈值就把帧连接上,该帧的mConnectedKeyFrameWeights获得更新,其值描述了该帧和添加的帧的共视权重,详解见注释:
void KeyFrame::UpdateConnections()
{
//===============1==================================
map<KeyFrame*,int> KFcounter; // 关键帧-权重,权重为其它关键帧与当前关键帧共视3d点的个数
vector<MapPoint*> vpMP;
{
// 获得该关键帧的所有3D点
unique_lock<mutex> lockMPs(mMutexFeatures);
vpMP = mvpMapPoints;
}
// 通过3D点间接统计可以观测到这些3D点的所有关键帧之间的共视程度
// 即统计每一个关键帧都有多少关键帧与它存在共视关系,统计结果放在KFcounter
for(vector<MapPoint*>::iterator vit=vpMP.begin(), vend=vpMP.end(); vit!=vend; vit++)
{
MapPoint* pMP = *vit;
if(!pMP)
continue;
if(pMP->isBad())
continue;
// 对于每一个MapPoint点,observations记录了可以观测到该MapPoint的所有关键帧
map<KeyFrame*,size_t> observations = pMP->GetObservations();
for(map<KeyFrame*,size_t>::iterator mit=observations.begin(), mend=observations.end(); mit!=mend; mit++)
{
// 除去自身,自己与自己不算共视
if(mit->first->mnId==mnId)
continue;
//权重 + 1
KFcounter[mit->first]++;
}
}
// This should not happen
if(KFcounter.empty())
return;
//===============2==================================
// 超过阈值就添加连接
// 如果没有超过该阈值的权重,那么就只保留权重最大的边
int nmax=0;
KeyFrame* pKFmax=NULL;
int th = 15;
// vPairs记录与其它关键帧共视帧数大于th的关键帧
// pair将关键帧的权重写在前面,关键帧写在后面方便后面排序
vector<pair<int,KeyFrame*> > vPairs;
vPairs.reserve(KFcounter.size());
for(map<KeyFrame*,int>::iterator mit=KFcounter.begin(), mend=KFcounter.end(); mit!=mend; mit++)
{
if(mit->second > nmax)
{
nmax = mit->second;
// 找到对应权重最大的关键帧(共视程度最高的关键帧)
pKFmax = mit->first;
}
if(mit->second >= th)
{
// 对应权重需要大于阈值,对这些关键帧建立连接
vPairs.push_back(make_pair(mit->second,mit->first));
// 更新KFcounter中该关键帧的mConnectedKeyFrameWeights
// 更新其它KeyFrame的mConnectedKeyFrameWeights,更新其它关键帧与当前帧的连接权重
(mit->first)->AddConnection(this,mit->second);
}
}
// 如果没有超过阈值的权重,则对权重最大的关键帧建立连接
if(vPairs.empty())
{
// 如果每个关键帧与它共视的关键帧的个数都少于th,
// 那就只更新与其它关键帧共视程度最高的关键帧的mConnectedKeyFrameWeights
// 这是对之前th这个阈值可能过高的一个补丁
vPairs.push_back(make_pair(nmax,pKFmax));
pKFmax->AddConnection(this,nmax);
}
// vPairs里存的都是相互共视程度比较高的关键帧和共视权重,由小到大
sort(vPairs.begin(),vPairs.end());
//lKFs和lWs由大到小
list<KeyFrame*> lKFs;
list<int> lWs;
for(size_t i=0; i<vPairs.size();i++)
{
lKFs.push_front(vPairs[i].second);
lWs.push_front(vPairs[i].first);
}
//===============3==================================
{
unique_lock<mutex> lockCon(mMutexConnections);
// mspConnectedKeyFrames = spConnectedKeyFrames;
// 更新图的连接(权重)
mConnectedKeyFrameWeights = KFcounter;//更新该KeyFrame的mConnectedKeyFrameWeights,更新当前帧与其它关键帧的连接权重
mvpOrderedConnectedKeyFrames = vector<KeyFrame*>(lKFs.begin(),lKFs.end());
mvOrderedWeights = vector<int>(lWs.begin(), lWs.end());
// 更新生成树的连接
if(mbFirstConnection && mnId!=0)
{
// 初始化该关键帧的父关键帧为共视程度最高的那个关键帧
mpParent = mvpOrderedConnectedKeyFrames.front();
// 建立双向连接关系
mpParent->AddChild(this);
mbFirstConnection = false;
}
}
}
第六步:全局优化
// Bundle Adjustment
cout << "New Map created with " << mpMap->MapPointsInMap() << " points" << endl;
// BA优化
Optimizer::GlobalBundleAdjustemnt(mpMap,20);
第七步:中值深度归一化
这步用的函数ComputeSceneMedianDepth里用到了dot运算,详情见 dot用法
// Set median depth to 1
// !!!将MapPoints的中值深度归一化到1,并归一化两帧之间变换
// 评估关键帧场景深度,q=2表示中值
float medianDepth = pKFini->ComputeSceneMedianDepth(2);
float invMedianDepth = 1.0f/medianDepth;
if(medianDepth<0 || pKFcur->TrackedMapPoints(1)<100)
{
cout << "Wrong initialization, reseting..." << endl;
Reset();
return;
}
// Scale initial baseline
cv::Mat Tc2w = pKFcur->GetPose();
// x/z y/z 将z归一化到1
Tc2w.col(3).rowRange(0,3) = Tc2w.col(3).rowRange(0,3)*invMedianDepth;
pKFcur->SetPose(Tc2w);
// Scale points
// 把3D点的尺度也归一化到1
vector<MapPoint*> vpAllMapPoints = pKFini->GetMapPointMatches();
for(size_t iMP=0; iMP<vpAllMapPoints.size(); iMP++)
{
if(vpAllMapPoints[iMP])
{
MapPoint* pMP = vpAllMapPoints[iMP];
pMP->SetWorldPos(pMP->GetWorldPos()*invMedianDepth);
}
}
第八步:收尾工作,参数交接
包括比如localmapping线程插入关键帧,当前帧pose的设置,“上一关键帧”(当前帧)的传递,参考帧的传递,MapDrawer画图等,最后状态置为OK。
mpLocalMapper->InsertKeyFrame(pKFini);
mpLocalMapper->InsertKeyFrame(pKFcur);
mCurrentFrame.SetPose(pKFcur->GetPose());
mnLastKeyFrameId=mCurrentFrame.mnId;
mpLastKeyFrame = pKFcur;
mvpLocalKeyFrames.push_back(pKFcur);
mvpLocalKeyFrames.push_back(pKFini);
mvpLocalMapPoints=mpMap->GetAllMapPoints();
mpReferenceKF = pKFcur;
mCurrentFrame.mpReferenceKF = pKFcur;
mLastFrame = Frame(mCurrentFrame);
mpMap->SetReferenceMapPoints(mvpLocalMapPoints);
mpMapDrawer->SetCurrentCameraPose(pKFcur->GetPose());
mpMap->mvpKeyFrameOrigins.push_back(pKFini);
mState=OK;// 初始化成功,至此,初始化过程完成
}
至此,MonocularInitialization工作完成。。。。正式进入Track!