STM32 PVD中断问题
void PVD_Init(void)
{
NVIC_InitTypeDef NVIC_InitStruct;
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitStruct.NVIC_IRQChannel = PVD_IRQn;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStruct);//允许中断
EXTI_ClearITPendingBit(EXTI_Line16);
EXTI_InitStructure.EXTI_Line = EXTI_Line16;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising;//EXTI_Trigger_Falling ;//EXTI_Trigger_Rising;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
}
void PVD_Init_0(void)
{
RCC_APB1PeriphClockCmd( RCC_APB1Periph_PWR, ENABLE); //_PWR, ENABLE); // 这个是必需的
PWR_PVDLevelConfig(PWR_PVDLevel_2V9);
PWR_PVDCmd(ENABLE);
}
//PVD中断函数如下
void PVD_IRQHandler(void)
{
EXTI_ClearITPendingBit(EXTI_Line16); //必须在if外面。
if(PWR_GetFlagStatus(PWR_FLAG_PVDO)) //
{
PWR_ClearFlag(PWR_FLAG_PVDO);
Save_BLDC_Hall_Position = Motor_Circle_Count_1;
__set_PRIMASK(1); //关闭总中断
WriteData[0] = 0xA5;
WriteData[1] = Save_BLDC_Hall_Position;
WriteData[2] = Save_Data_Count;
WriteEEPROM(Save_Hall_Position_Address,WriteData,3);
__set_PRIMASK(0);
//STMFLASH_Write(FLASH_SAVE_ADDR,(u16*)TEXT_Buffer,11);本想在这里进行存储操作
}
}
int main(void)
{
NVIC_SetVectorTable(NVIC_VectTab_FLASH + 0X0000, 0x0);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
PVD_Init_0();//PVD初始化的函数,必须放在Main函数的开头处
PVD_Init();
}1、
RCC_APB1PeriphClockCmd( RCC_APB1Periph_PWR, ENABLE); //_PWR, ENABLE); // 这个是必需的
PWR_PVDLevelConfig(PWR_PVDLevel_2V9);
PWR_PVDCmd(ENABLE);
必须放在void PVD_Init(void)之前,否则不能进入中断;
2、初始化的函数,尽量在一进入main函数就初始化;
3、芯片型号为stm32f103c8,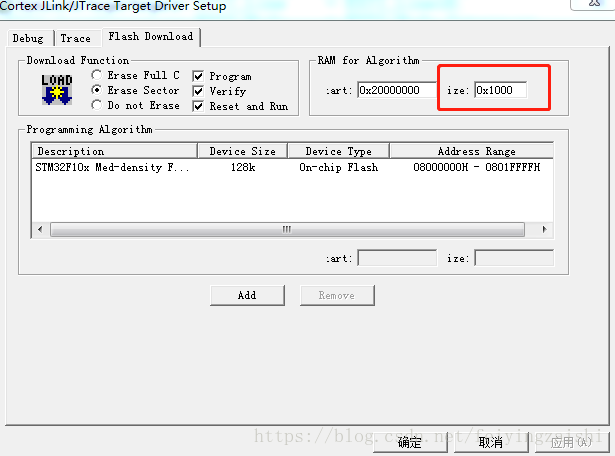 ,红色标注框,为0X0800无法进入中断,改为0X1000就可以进入中断。
,红色标注框,为0X0800无法进入中断,改为0X1000就可以进入中断。