ROS笔记(三)用键盘控制模型在gazebo中移动
使用上一个笔记中的模型,实现在gazebo中用键盘控制移动。
熟悉ROS的通信方式。

经过一点时间的摸索和查找资料,发现模型设计还是有很多不合理的地方,比如腿的自由度、没有规定材料、减重等,目前只是为了熟悉ROS通信方式,且没有学习过步态规划,于是简化固定了一些关节,从每条腿的4自由度(髋关节垂直于身体旋转,髋关节前后摆动,膝关节前后摆动,足端沿小腿方向伸缩滑动),变成了2自由度(髋关节前后摆动,足端沿小腿方向伸缩滑动)。
在工作空间下有三个功能包。
其中mydog6_description是SolidWorks导出URDF文件夹,并且手动添加了base_link用于修正模型位子,将URDF改写为xarco,由于惯、和碰撞、关节限位、力矩、速度属性在SolidWorks导出URDF时已经生成,只需添加gazebo_ros_control插件和传动装置。
其中mydog6_dgazebo文件实现了模型在gazebo中的可视化,在上一笔记基础上还需要包含一个launch文件,使得gazebo订阅关节位置信息。
这个mydog6_control.launch在mydog6_control功能包的launch文件下。
其中mydog6_control.yaml内容:
mydog6:
# Publish all joint states -----------------------------------
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 100
# Position Controllers ---------------------------------------
joint1_position_controller:
type: position_controllers/JointPositionController
joint: Joint_lf_2
#pid: {p: 100.0, i: 0.01, d: 10.0}
joint2_position_controller:
type: position_controllers/JointPositionController
joint: Joint_rf_2
#pid: {p: 100.0, i: 0.01, d: 10.0}
joint3_position_controller:
type: position_controllers/JointPositionController
joint: Joint_lb_2
#pid: {p: 100.0, i: 0.01, d: 10.0}
joint4_position_controller:
type: position_controllers/JointPositionController
joint: Joint_rb_2
#pid: {p: 100.0, i: 0.01, d: 10.0}
joint5_position_controller:
type: position_controllers/JointPositionController
joint: Joint_lf_4
#pid: {p: 100.0, i: 0.01, d: 10.0}
joint6_position_controller:
type: position_controllers/JointPositionController
joint: Joint_rf_4
#pid: {p: 100.0, i: 0.01, d: 10.0}
joint7_position_controller:
type: position_controllers/JointPositionController
joint: Joint_lb_4
#pid: {p: 100.0, i: 0.01, d: 10.0}
joint8_position_controller:
type: position_controllers/JointPositionController
joint: Joint_rb_4
#pid: {p: 100.0, i: 0.01, d: 10.0}
gazebo_ros_control/pid_gains:
Joint_lf_2: {p: 100.0, i: 0.0, d: 10.0}
Joint_rf_2: {p: 100.0, i: 0.0, d: 10.0}
Joint_lb_2: {p: 100.0, i: 0.0, d: 10.0}
Joint_rb_2: {p: 100.0, i: 0.0, d: 10.0}
Joint_lf_4: {p: 2544.0, i: 0, d: 0.0}
Joint_rf_4: {p: 2544.0, i: 0, d: 0.0}
Joint_lb_4: {p: 2544.0, i: 0, d: 0.0}
Joint_rb_4: {p: 2544.0, i: 0, d: 0.0}
是ros_control需要设置的一些参数,即发布关节状态、关节使用位置控制并设置PID。
启动gazebo环境:roslaunch mydog6_gazebo mydog6_world.launch
使用rostopic list 和info 可以看到gazebo已经订阅了话题。

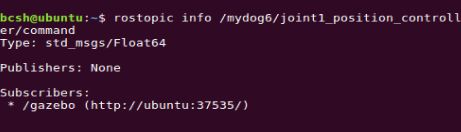
我们只需要写对应的 publisher,将关节位子信息发出去,即可以控制gazebo中模型的运动。
要使用键盘控制模型,即需要一个节点1来发布按键信息,需要一个节点2来订阅节点1的信息,根据按下的键进行相应的关节信息的发布,所以节点2有两个功能,订阅键盘节点发布的消息和发布消息给gazebo。

其中pid_test节点是用来调PID用的,从gazebo仿真环境中获取关节实际控制弧度。
暂时还没学过步态规划,于是使用最简单的对角步态,用正弦函数驱动,最终可以简单的完成前后左右的运动。
存在的一些问题:
1.PID调节:
根据经典控制理论,系统要有明确的输入和输出。例如,对滑动关节进行位置控制,那么系统的输入量就是目标关节位置 θd ,输出量就是当前关节位置 θ 。由于是电机驱动,而电机本身并不直接识别位置信号,而是通过电流来控制力矩。查看gazebo_ros_control插件目录下的src/default_robot_hw_sim.cpp,POSITION_PID情况下调用了Gazebo的SetForce()接口,因此该插件的确是以力/力矩作为作用信号的。
于是输入量和输出量转化为所需的关节力矩信号,滑动关节单纯使用P控制时,动力学方程大概为:Kp*偏差=惯性力+阻尼力+重力。最开始调节按照自控理论来调试,P用优选法,再调I,发现效果都不好,波形存在杂波,有“尖峰”或“突跳”。经过分析,发现很可是是结构原因造成的(足端为滑动关节),受到重力等影响滑动关节力矩略有改变,于是有偏差,有偏差即控制,使滑动关节运动,使模型重心位子略有改变,力的作用而带来滑动关节随机的振荡,滑动关节伸出量越长,重心越高,滑动关节振荡幅度越大。表现为在gazebo中模型由于滑动关节振动会打滑。在gazebo中将模型推翻,使得滑动关节不负重(身体,大腿等刚体的重量),控制效果和理论一样,不会有突变的杂波,滑动关节也不会振动,可以确定干扰一部分来自自于结构的不合理。接下来还需要学习理论知识进行分析和改进。
2.经过实践和查询相关文献,发现模型设计的不合理,主要是足端滑动关节,本模型共四条腿且每条腿4个自由度,实际很多四足每条腿3个自由度,分别为髋关节上下前后和膝关节前后,并没有旋转。可以考虑改进模型,使用SolidWorks设计结构,每条腿使用3个自由度,而不再使用滑动关节。
体会:
从节点图可以看出来,让模型动起来并不算复杂,通过这个简单的实践,熟悉了模型的编写,除了手写以外还可以通过SolidWorks导出, 熟悉了仿真环境的搭建,并利用ROS原生的话题通信方式实现了模型的控制。ROS是一个很好的工具,具有良好的通信框架,它可以给我们搭建一个仿真平台,去验证一些想法,要实现一个模型的仿真涉及的方面很多,编程能力只是其中之一。理论知识也很重要,比如对角步态虽然是用的简单的sin驱动,但是由于缺少理论支撑,更多的时候是在调试,在用脑子想象运动的状态,让模型动起来更多的是在尝试。接下来的一段时间,需要学习一些运动学理论知识,若增加关节自由度,可能还需要设计规划步态和求运动学逆解。抓紧时候多看书。
对gazebo不是很理解,也不清楚参数配置是否正确,再花时间将gazebo教程完整跑一遍。