CC2640R2F学习笔记(22)——SPI接口使用
一、硬件连接
| 功能口 | 引脚 |
|---|---|
| MISO | DIO_8 |
| MOSI | DIO_9 |
| CLK | DIO_10 |
| CSN | DIO_11 |
修改引脚配置: 例如 SDK2.4 multi_role工程 Startup目录下 board.c 跳转到 cc2640r2em_board.c
#if defined(CC2640R2DK_CXS) || defined (CC2640R2DK_4XS) \
|| defined (CC2640R2DK_5XD) || defined (CC2640R2DK_7ID)
#include "./cc2640r2em/cc2640r2em_board.c"
芯片为5x5时,跳转 CC2640R2DK_5XD.c
芯片为7x7时,跳转 CC2640R2DK_7ID.c
#elif defined(CC2640R2DK_5XD)
#include "../../boards/CC2640R2DK_5XD/Board.h"
#include "../../boards/CC2640R2DK_5XD/CC2640R2DK_5XD.c"
#elif defined(CC2640R2DK_7ID)
#include "../../boards/CC2640R2DK_7ID/Board.h"
#include "../../boards/CC2640R2DK_7ID/CC2640R2DK_7ID.c"
找到 SPI 结构体
/*
* =============================== SPI DMA ===============================
*/
#include 跳转修改宏 CC2640R2DK_5XD_SPI0_MOSI、CC2640R2DK_5XD_SPI0_MISO、CC2640R2DK_5XD_SPI0_CLK
/* SPI Board */
#define CC2640R2DK_5XD_SPI0_MISO IOID_8//IOID_12 /* P1.20 */
#define CC2640R2DK_5XD_SPI0_MOSI IOID_9//IOID_11 /* P1.18 */
#define CC2640R2DK_5XD_SPI0_CLK IOID_10 /* P1.16 */
#define CC2640R2DK_5XD_SPI0_CSN PIN_UNASSIGNED
二、移植文件
链接:https://pan.baidu.com/s/1FyY_NgHTzJ5bI1oWxkr6iQ 提取码:cydx
将 board_spi.c 和 board_spi.h 两个文件拖拽至CCS工程的Application文件夹下
添加文件过程中,选项选择如下


2.1 board_spi.c
/*********************************************************************
* INCLUDES
*/
//#include 2.2 board_spi.h
#ifndef _BOARD_SPI_H_
#define _BOARD_SPI_H_
/*********************************************************************
* INCLUDES
*/
#include "board.h"
/*********************************************************************
* DEFINITIONS
*/
#define BOARD_SPI_CS_ON 0
#define BOARD_SPI_CS_OFF 1
#define BOARD_SPI0_CSN_IO IOID_11
#define SPI_CS_HIGH SPI_CsnSet(BOARD_SPI0_CSN_IO, BOARD_SPI_CS_OFF)
#define SPI_CS_LOW SPI_CsnSet(BOARD_SPI0_CSN_IO, BOARD_SPI_CS_ON)
/*********************************************************************
* API FUNCTIONS
*/
void SPI_Init(void);
void SPI_CsnSet(PIN_Id pinId, bool pinState);
void SPI_ReadWriteData(uint8_t *pWriteData, uint8_t *pReadData, uint8_t writeDataLen);
#endif /* _BOARD_SPI_H_ */
三、API调用
需包含头文件 board_spi.h
SPI_Init
| 功能 | 初始化SPI驱动 |
|---|---|
| 函数定义 | void SPI_Init(void) |
| 参数 | 无 |
| 返回 | 无 |
SPI_CsnSet
| 功能 | SPI片选信号设置 |
|---|---|
| 函数定义 | void SPI_CsnSet(PIN_Id pinId, bool pinState) |
| 参数 | pinId:引脚号 pinState:引脚状态 |
| 返回 | 无 |
SPI_ReadWriteData
| 功能 | SPI读出写入数据 |
|---|---|
| 函数定义 | void SPI_ReadWriteData(uint8_t *pWriteData, uint8_t *pReadData, uint8_t writeDataLen) |
| 参数 | pWriteData:写入数据 pReadData:读出数据 writeDataLen:写入数据长度 |
| 返回 | 无 |
四、使用例子
1)添加头文件(例multi_role.c中)
#include "board_spi.h"
2)添加初始化代码(multi_role.c的multi_role_init函数末尾中)
// SPI初始化
SPI_Init();
3)写入数据
uint8_t temp[1] = {0x01};
SPI_ReadWriteData(temp, NULL, sizeof(uint8_t));
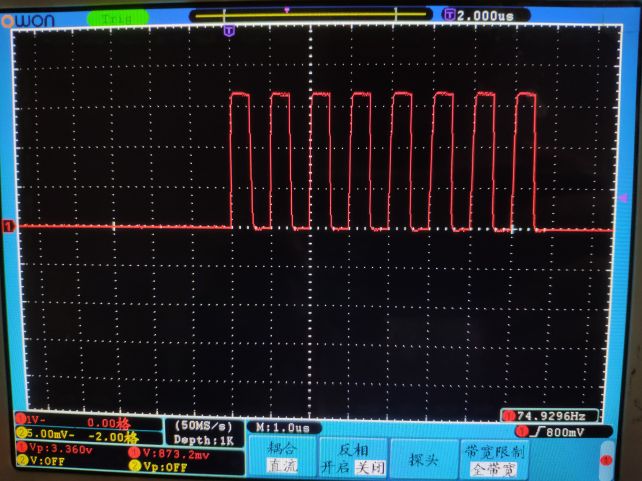
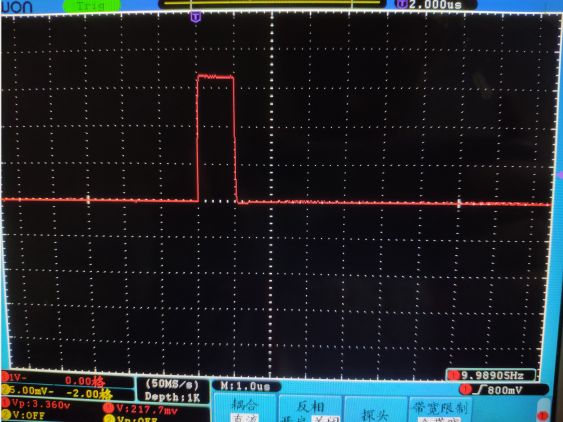
4)查看示波器
CLK
MOSI
• 由 Leung 写于 2019 年 8 月 26 日
• 参考:CC2640R2F BLE5.0 CC2640R2F SPI驱动实现