Pixhwak差速无人艇配置改装笔记
文章目录
- 声明
- 背景
- 版本说明
- 简述
- 硬件配置
- 硬件外部接口图示
- 软件配置
- 海康相机配置
- 常见问题
- 指南针不准
- HUB侧斜
- 加载固件
- 自主导航走不了直线
- 自主导航没反应
- 自主导航连接不上
- 改外接NEMA格式的GPS
声明
如果你也有兴趣或者想找作者聊聊,欢迎留言或发送邮件至:[email protected]
作者还拥有个人公众号,会写一些管理、感悟类文章,知圈,自创立以来一直保持着高质量(后台统计每篇的阅读完成率都在90%以上)持续更新,二维码如下,欢迎扫描关注:

背景
由于设计需要,需要做一艘无人艇。最终方案选型为pixhawk下位机差速+mission planner上位机方案。此为当时的设计笔记。如有疑问或想与作者探讨,欢迎扫描上面的知圈二维码,关注后有作者的微信号添加提示。
英文可以的可以去官网查看。
版本说明
| 版本号 | 更新 | 备注 | 更改人 | 审核人 |
|---|---|---|---|---|
| V1.0.0 | 初版 | |||
| V1.0.1 | 增加连接问题 | |||
| V1.0.2 | 增加外置GPS | |||
| V1.1.0 |
|
重大更新,之前文档请销毁 | ||
| V2.0.0 | 增加Hik摄像头功能 | |||
| V2.1.0 | 同步FlotillaV4.3.0内容 |
简述
Flotilla自主导航分为软件和硬件两部分。软件基于Mission Planner内核开发而来。硬件基于pixhawk系列的pixhawk1内核开发而来。基于此,本文档分软件和硬件两大部分进行描述。
Flotilla Version:
| Version | Describe Note |
|---|---|
| Flotilla V4.2.1 | 添加海康摄像头 |
| Flotilla V4.3.0 | 添加海康摄像头双击弹出功能 |
说明:
- 版本号以第一个标号为兼容标识,例如 V4.1.2.3与V4.2.3.4兼容但并不与V5.0.0.0兼容。
硬件配置
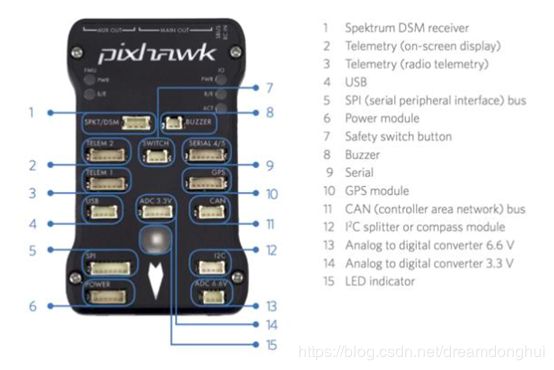
硬件外部接口图示
注意:
- 所列内容为全部接口定义,现实中大多数不用,请勿随意更改以防干扰其正常运行。
- 物理接口标准为DF13。
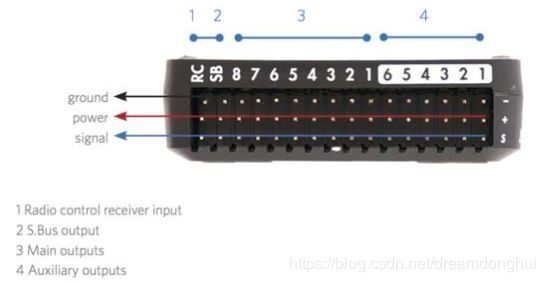
- 尾部三排插针中上排为GND,中间一排为复用口,不一定是VCC。如需VCC请尽量在正面接口中引出。
- 无人艇左右舷的PWM输出口MAIN PWM OUTPUTS的1(左)口和3口(右)。遥控器的信号从RC排的signal针输入。
- 外接GPS需要TTL电平,接pixhawk的GPS 6P DF口,只需接PIXHAWK的RX口和接地即可。注:TX口建议不要接,pixhawk会向外发送GPS配置命令,若GPS不兼容会对GPS造成干扰。
版本对应表:
| 软件版本 | 硬件版本 | 备注 |
|---|---|---|
| Flotilla V4.0.0.0 | APMrover2-v3_4_2.px4 | 固件见光盘 |



TELEM1, TELEM2 ports:
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (OUT) | +3.3V |
| 3 (blk) | RX (IN) | +3.3V |
| 4 (blk) | CTS | +3.3V |
| 5 (blk) | RTS | +3.3V |
| 6 (blk) | GND | GND |
GPS Port:
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (OUT) | +3.3V |
| 3 (blk) | RX (IN) | +3.3V |
| 4 (blk) | CAN2 | TX |
| 5 (blk) | CAN2 | RX |
| 6 (blk) | GND | GND |
SERIAL 4/5 port
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (#4) | +3.3V |
| 3 (blk) | RX (#4) | +3.3V |
| 4 (blk) | TX (#5) | +3.3V |
| 5 (blk) | RX (#5) | +3.3V |
| 6 (blk) | GND | GND |
ADC 6.6V
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | ADC IN | up to +6.6V |
| 3 (blk) | GND | GND |
ADC3.3V
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | ADC IN | up to +3.3V |
| 3 (blk) | GND | GND |
| 4 (blk) | ADC IN | up to +3.3V |
| 5 (blk) | GND | GND |
I2C
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | SCL | +3.3 (pullups) |
| 3 (blk) | SDA | +3.3 (pullups) |
| 4 (blk) | GND | GND |
CAN
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | CAN_H | +12V |
| 3 (blk) | CAN_L | +12V |
| 4 (blk) | GND | GND |
SPI
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | SPI_SCK | 3.3V |
| 3 (blk) | SPI_MISO | +3.3V |
| 4 (blk) | SPI_MOSI | +3.3V |
| 5 (blk) | !SPI_NSS | +3.3V |
| 6 (blk) | !GPIO | +3.3V |
| 7 (blk) | GND | GND |
Power
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | VCC | +5V |
| 3 (blk) | CURRENT | up to +3.3V |
| 4 (blk) | VOLTAGE | up to +3.3V |
| 5 (blk) | GND | GND |
| 6 (blk) | GND | GND |
Switch
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | VCC | +3.3V |
| 2 (blk) | !IO_LED_SAFETY | GND |
| 3 (blk) | SAFETY | GND |
Console Port
The system’s serial console runs on the port labeled SERIAL4/5. The pinout is standard serial pinout, to connect to a standard FTDI cable (3.3V, but it’s 5V tolerant).
| Pixhawk | FTDI | ||
|---|---|---|---|
| 1 | +5V (red) | N/C | |
| 2 | Tx | N/C | |
| 3 | Rx | N/C | |
| 4 | Tx | 5 | Rx (yellow) |
| 5 | Rx | 4 | Tx (orange) |
| 6 | GND | 1 | GND (black) |
Spektrum/DSM Port
The Spektrum/DSM port is for connecting Spektrum DSM-2/DSMX receiver modules.
| Pin | Signal | Volt |
|---|---|---|
| 1 (white) | Signal | +3.3V |
| 2 (black) | GND | GND |
| 3 (red) | VCC | +3.3V |
软件配置
注意:
- 参数更改后一定要点击写入。注:有些子菜单中无写入选项,是及时自动写入的。
- 严禁使用加载参数文件的形式进行参数改写!!!由于参数里面包含硬件部分部件的ID信息,禁止手动更改。覆盖后会致使控制盒崩溃无法修复(重刷固件也无法修复)!!!
- 严禁使用软件的恢复默认参数设置!
- ARMED情况下无法进行指南针等的校准工作,请先DISARM。同时,部分参数在ARMED情况下的更改无法立即生效。
- 大多数的参数修改需要重启硬件后生效!
- 请养成更改参数的良好习惯,在Auto模式或ARMED状态下不要进行参数更改。
- 不同版本之间参数格式不完全兼容,固件一定要刷指定版本!采用不兼容版本的软件对pixhawk进行参数配置会导致pixhawk内部参数区冲突无法正常运行并不可恢复。
- 严禁更改不确定的参数。
- 软件不可在线更新。
版本对应表:
| 软件版本 | 硬件版本 | 备注 |
|---|---|---|
| Flotilla V4.0.0.0 | APMrover2-v3_4_2.px4 | 固件见光盘 |
以下参数为无人艇需要更改的参数。此参数在软件里面有详细的功能介绍,也可去网上自行学习。请熟练掌握这些参数。
| 参数 | 配置 | 说明 |
|---|---|---|
| ARMING_CHECK | 0 | |
| ARMING_REQUIRE | 1 | 备注:0:硬件上电自动ARMING。 |
| AUTO_KICKSTART | 0 | |
| BRD_SAFETYENABLE | 0 | |
| BTN_ENABLE | 0 | |
| FENCE_ACTION | 0 | |
| FENCE_ENABLE | 0 | |
| FRAME_CLASS | 2 | |
| FS_ACTION | 0 | |
| FS_CRASH_CHECK | 0 | |
| FS_GCS_ENABLE | 0 | |
| FS_THR_ENABLE | 0 | |
| GPS_RATE_MS | 备注:此参数与GPS发送频率有关,低于5HZ的GPS频率不可用。 | |
| GPS_TYPE | 备注:外接GPS请选择5 NEMA。原装GPS为ublox。1 AUTO可识别ublox。 | |
| MIS_RESTART | 备注:重新启动自主导航时的动作。0:继续上次任务 1:重启任务 | |
| MODE1 | 0 | |
| MODE2 | 0 | |
| MODE3 | 0 | |
| MODE4 | 10 | |
| MODE5 | 0 | |
| MODE6 | 0 | |
| PILOT_STEER_TYPE | 1 | |
| PIVOT_TURN_ANGLE | 60 | 备注:参数为角度,在首向偏角大于此参数时做绕点转向动作 |
| SERVO1_FUNCTION | 73 | |
| SREVO3_FUNCTION | 74 |
海康相机配置
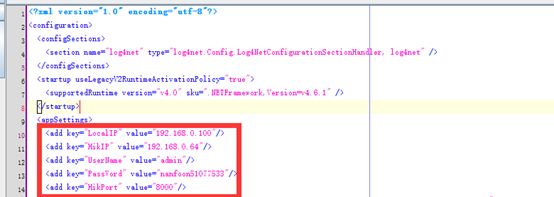
从Flotilla 4.2.1版本开始,增加海康摄像头功能。默认配置为:
- 本地IP192.168.0.100
- 摄像头IP 192.168.0.64
- 用户名admin
- 密码nanfoon51077533
- 端口8000
如若更改配置,请找到Flotilla.exe同文件夹下的Flotilla.exe.config文件,用记事本或者其它文本编辑器打开,找到如下字段,更改所需配置即可。
如点击视频后返回错误码,请参考以下信息进行诊断:
| 错误类型 | 错误值 | 错误信息 |
|---|---|---|
| NET_DVR_NOERROR | 0 | 没有错误。 |
| NET_DVR_PASSWORD_ERROR | 1 | 用户名密码错误。注册时输入的用户名或者密码错误。 |
| NET_DVR_NOINIT | 3 | SDK未初始化。 |
| NET_DVR_NETWORK_FAIL_CONNECT | 7 | 连接设备失败。设备不在线或网络原因引起的连接超时等。 |
| NET_DVR_NETWORK_SEND_ERROR | 8 | 向设备发送失败。 |
| NET_DVR_NETWORK_RECV_ERROR | 9 | 从设备接收数据失败。 |
| NET_DVR_NETWORK_RECV_TIMEOUT | 10 | 从设备接收数据超时。 |
| NET_DVR_COMMANDTIMEOUT | 14 | 设备命令执行超时。 |
| NET_DVR_PARAMETER_ERROR | 17 | 参数错误。SDK接口中给入的输入或输出参数为空。 |
| NET_DVR_ALLOC_RESOURCE_ERROR | 41 | SDK资源分配错误。 |
| NET_DVR_NOENOUGH_BUF | 43 | 缓冲区太小。接收设备数据的缓冲区或存放图片缓冲区不足。 |
| NET_DVR_CREATESOCKET_ERROR | 44 | 创建SOCKET出错。 |
| NET_DVR_MAX_NUM | 46 | 个数达到最大。分配的注册连接数、预览连接数超过SDK支持的最大数。 |
| NET_DVR_MAX_USERNUM | 52 | 登录设备的用户数达到最大。 |
| NET_DVR_BINDSOCKET_ERROR | 72 | 绑定套接字失败。 |
| NET_DVR_SOCKETCLOSE_ERROR | 73 | socket连接中断,此错误通常是由于连接中断或目的地不可达。 |
常见问题
指南针不准
控制盒首向由板载指南针和集成在Ublox里的外部指南针协同计算而来。同时在运行过程中控制盒会根据GPS对指南针进行修正。
首先判断是否周围是否有明显磁场干扰,比如大型船舶等。船体所在载体是否为铁质,比如测试时控制盒被放在了道路铁质井盖上。
请确保两个指南针模块方向一致。
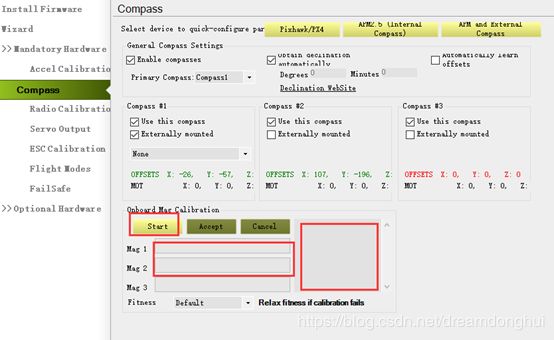
如周围无干扰,请按照如下步骤校准指南针:
- 点击start后,晃动控制盒,Mag 1和Mag 2会出现蓝色进度条,同时右侧也会出现校准进程文字提示。
- 三维空间转动控制盒,使其进度条达到100%并且右侧文字有success的提示。
- 校验完成。
HUB侧斜
控制盒有加速度传感器能够感知船体姿态,倾斜并不影响船体运行,若想纠正,请进行姿态传感器校准。
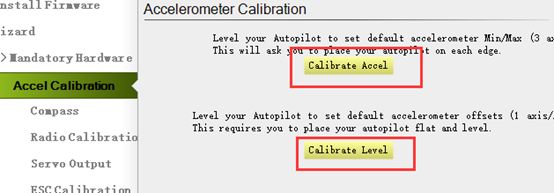
若只是想校准水平,将控制盒放置水平并保持绝对静止,点击calibrate level。
若想进行三轴向的校准,请保证控制盒可以三轴向随意运动,然后点击calibrate accel按照提示进行校准(它会提示将控制盒平放,然后点击校准,然后侧放,点击校准等,请一定要等待其放好后再点击下一步。)
加载固件
加载固件要在控制盒已经插入电脑但是并未与Flotilla连接的状态下进行。由于电台传输有延时,加载固件的工作强烈建议通过microUSB转USB线将控制盒内部的pixhawk板与计算机直接相连。
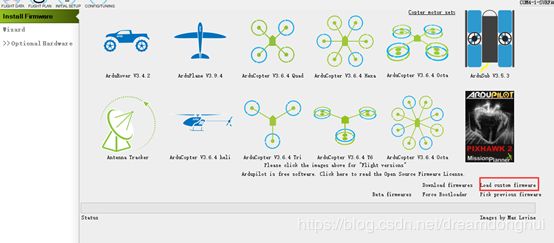
点击此界面的Load custom firmware即可进行固件加载。请注意一定要刷对应版本。
自主导航走不了直线
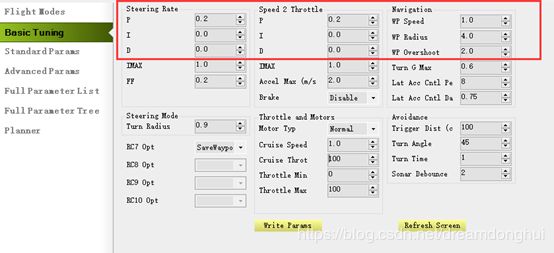
请调节以上参数。PID调节方法很多,请掌握基本的PID调节知识。禁止乱猜乱改。
基本调参可以只调P,将I和D置为0。WP Speed若设置为0则为跟随巡航速度。
自主导航没反应
请仔细核对参数是否以更改正确。
请确认是否已经ARMED状态。
如果提示Failsafe,说明参数未正确更改或更改后未重启控制盒。
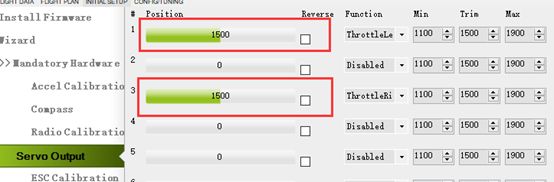
若想查看控制盒输出,请查看下图窗口,他们分别对应自主导航下达的PWM控制指令,1500为静止,小于1500为倒转,大于1500为正转。如果发现输出有但是输出很很小,请调节PID参数(可以只调大P)。
自主导航连接不上
控制盒里的pixhawk板默认通过microUSB连接,此口是115200波特率。若通过正面的serial接口连接,默认为57600。
控制盒在通电后会有启动蜂鸣声,蜂鸣声结束即代表已完成启动,此过程大约需要30秒,若在启动过程中进行连接,会连接失败并可能会造成启动中断。
Flotilla通过持续监测控制盒发送的心跳包来判断正常运行时的连接状态。控制盒在特定的操作中(例如刷写固件)会进入不同的启动模式并停发心跳包并等待特定命令。若误入此状态,重启控制盒即可正常连接。
改外接NEMA格式的GPS
外接GPS需要TTL电平,接pixhawk的GPS 6P DF口,只需接PIXHAWK的RX口和接地即可。注:TX口建议不要接,pixhawk会向外发送GPS配置命令,若GPS不兼容会对GPS造成干扰。
软件参数的GPS_RATE_MS和GPS_TYPE要改。请参见软件设置里的参数列表说明。
另外需要注意,如果只输出GPGGA格式,不能满足导航需求。需要其它辅助输出。以下输出可以进行自主导航但并不是全部都需要。
$GPGGA,031053.80,3052.06368,N,12154.39559,E,1,06,1.47,33.0,M,11.0,M,6B
$GPGSA,A,3,24,20,15,10,12,13,2.13,1.47,1.5501
$GPGSV,3,1,11,10,34,319,41,12,24,136,32,13,06,068,39,14,01,266,75
$GPGSV,3,2,11,15,39,059,47,20,64,321,36,21,42,229,19,24,67,045,4973
$GPGSV,3,3,11,25,12,168,19,32,14,276,14,42,46,140,49
$GPGLL,3052.06368,N,12154.39559,E,031053.80,A,A6A
$GPRMC,031053.90,A,3052.06369,N,12154.39559,E,0.157,110119,A79
$GPVTG,T,M,0.157,N,0.291,K,A2A