openCV学习笔记(十二)-- 图像矩,点多边形距离测试
- 图像矩
- 点多边形距离测试
1. 图像矩

图像中心计算

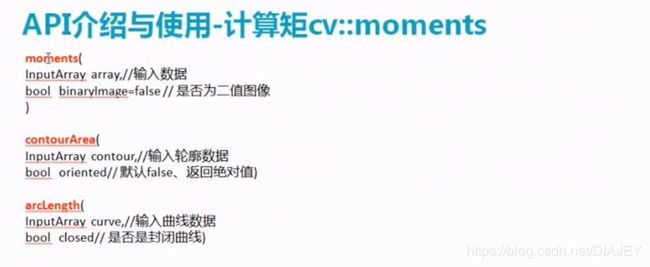
计算矩的API
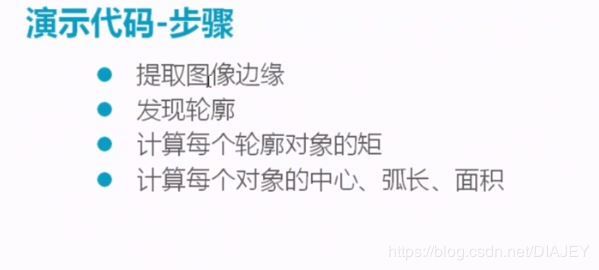
具体实现步骤
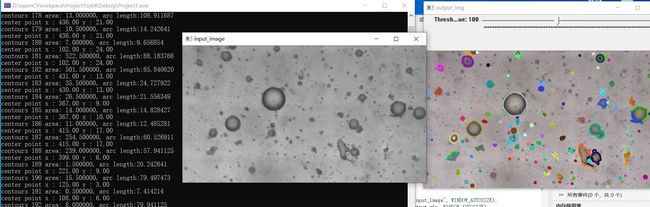
再找出图像的中心质点后,可以在输出图像中画出来
实现代码:
//图像矩
#include2. 点多边形距离测试
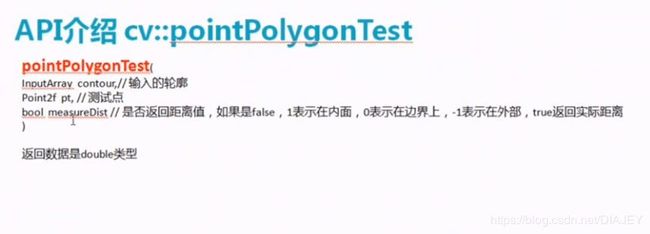
主要时测量一个像素点是否在多边形的什么位置,越靠近轮廓值越小(负值则越大)

openCV代码:
#include效果展示:
