一、视频学习及问题总结
-
深度学习的数学基础
1.1 矩阵线性变换
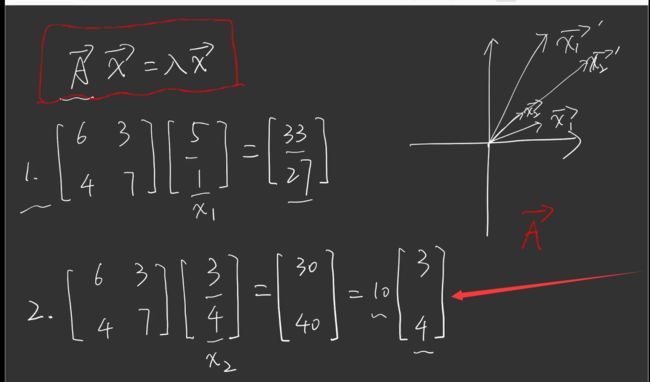
给定的矩阵A,假设其特征值为λ,特征向量为x,则有Ax=λx , 特征向量只有尺度变化,没有方向变化,变化系数就是特征值。
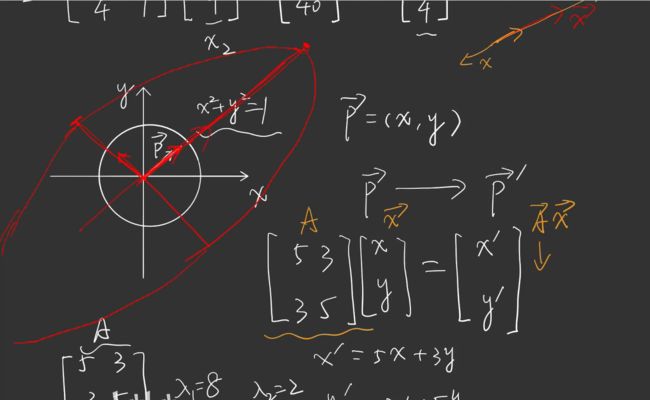
下图就是矩阵线性变换的示意图。求出矩阵的特征值为2和8,得出特征向量(1.-1)、(1.1),图形由圆形经过变换变成椭圆。
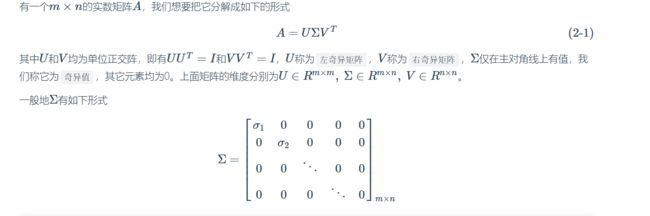
1.2 奇异值分解
- 奇异值分解常用于数据压缩和图像去噪。
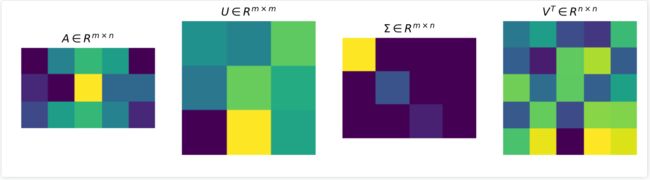
对于奇异值分解,我们可以利用上面的图形象表示,图中方块的颜色表示值的大小,颜色越浅,值越大。对于奇异值矩阵Σ,只有其主对角线有奇异值,其余均为0。
奇异值分解在图像压缩中的应用
%matplotlib inline
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
import numpy as np
img_eg = mpimg.imread("../img/beauty.jpg")
print(img_eg.shape
#图片的大小是600×400×3
#奇异值分解
img_temp = img_eg.reshape(600, 400 * 3)
U,Sigma,VT = np.linalg.svd(img_temp)
我们先将图片变成600×1200,再做奇异值分解。从svd函数中得到的奇异值sigma它是从大到小排列的。
# 取前60个奇异值
sval_nums = 60
img_restruct1 = (U[:,0:sval_nums]).dot(np.diag(Sigma[0:sval_nums])).dot(VT[0:sval_nums,:])
img_restruct1 = img_restruct1.reshape(600,400,3)
# 取前120个奇异值
sval_nums = 120
img_restruct2 = (U[:,0:sval_nums]).dot(np.diag(Sigma[0:sval_nums])).dot(VT[0:sval_nums,:])
img_restruct2 = img_restruct2.reshape(600,400,3)
#将图片显示出来看一下,对比下效果
fig, ax = plt.subplots(1,3,figsize = (24,32))
ax[0].imshow(img_eg)
ax[0].set(title = "src")
ax[1].imshow(img_restruct1.astype(np.uint8))
ax[1].set(title = "nums of sigma = 60")
ax[2].imshow(img_restruct2.astype(np.uint8))
ax[2].set(title = "nums of sigma = 120")
当我们取到前面120个奇异值来重构图片时,基本上已经看不出与原图片有多大的差别。如下图所示。(资料参考自网络)。

从上面的图片的压缩结果中可以看出来,奇异值可以被看作成一个矩阵的代表值,或者说,奇异值能够代表这个矩阵的信息。当奇异值越大时,它代表的信息越多。因此,我们取前面若干个最大的奇异值,就可以基本上还原出数据本身。
-
卷积神经网络-卷积层
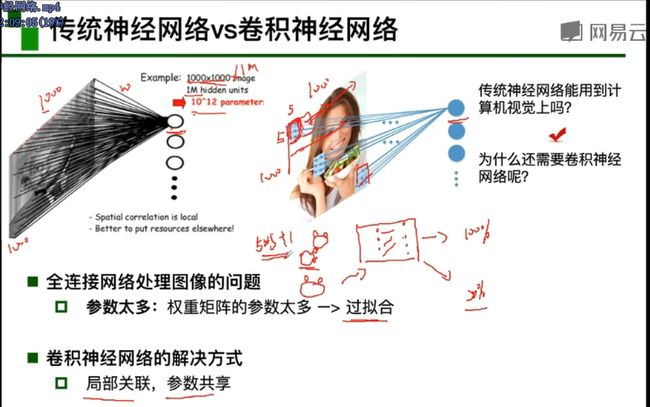
传统的神经网络中间都是全连接层,权重矩阵的参数多,容易出现过拟合的情况。所谓过拟合,就是过度拟合了训练集上的特征,泛化能力比较差。所以采取了卷积神经网络,卷积神经网络中间包含卷积层、池化层、全连接层。卷积神经网络采用局部互联,不再是神经元和整个图片上都有连接,而是连接图片上小的局部块,也就是卷积核。参数的大小跟卷积核有关,大大的降低了参数量,使得模型更好的训练。
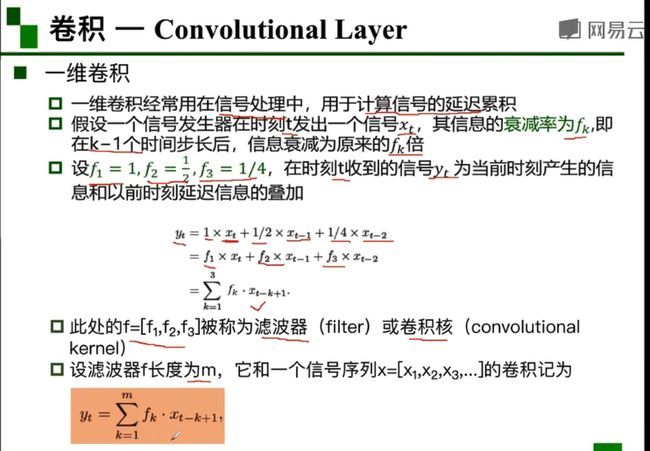
1.3 一维卷积
一维卷积经常用在信号处理中,用来计算信号的延迟累积。
1.4 二维卷积
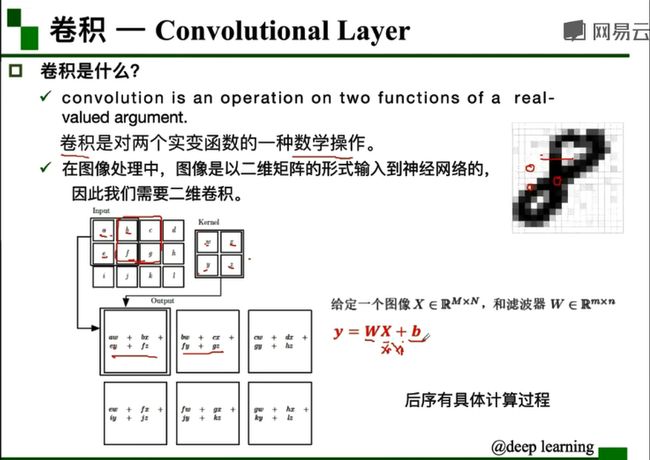
W对应于卷积核的参数,也就是权重,X对应input里的一块区域。 在卷积核进行一次卷积的时候,input里的这块区域称之为该卷积核对应的感受野(receptive field)。在经过一次卷积之后输出的结果叫做特征图。步长(stride)为1时表示卷积一次向右移动一个单位长度,当出现右边的大小不匹配时,如图:

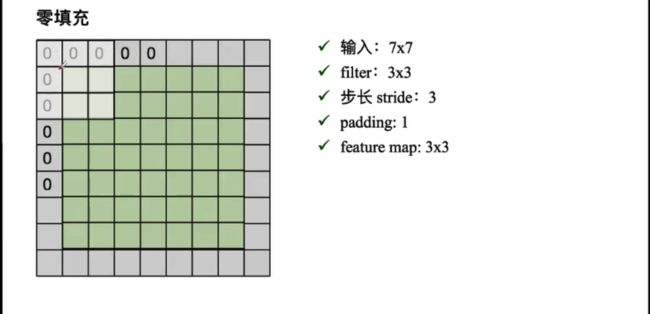
此时在输入的两边进行补0。也就是padding的概念。
当输入为7x7x3时,此时的3可以理解为图像的3个通道,也可以理解为3个feature map。 一个3*3的filiter又包含了3个不同的权重矩阵,每一个权重矩阵对应一个通道进行运算。结果求和得到输出的feature map上的对应值。
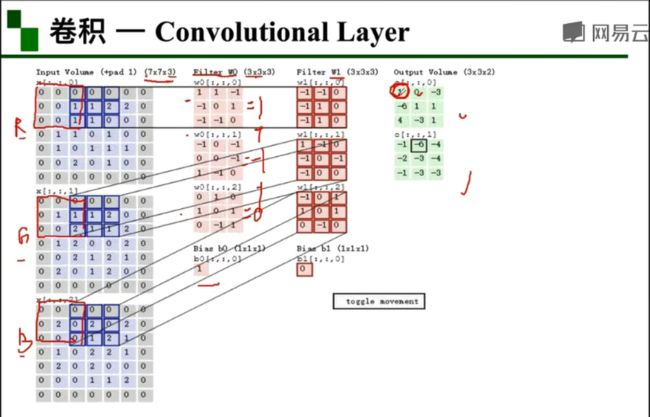
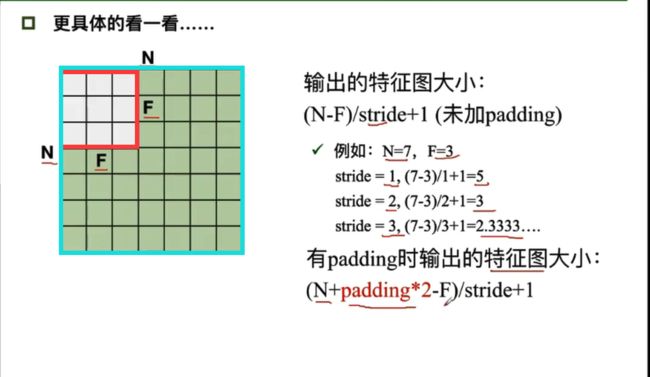
输出的特征图大小可以通过输入的大小和卷积核的大小计算得来。
深度(depth/channel)跟卷积核的个数有关,有多少个卷积核就有多少的channel。
input:32*32
filter:10,5*5 就是10个5*5的卷积核
stride:1 步长为1
padding:2
output feature map: 输出的特征图大小就是32*32*10
(32+2*2-5)/1+1=32
参数量:(5*5+1)*10=260
-
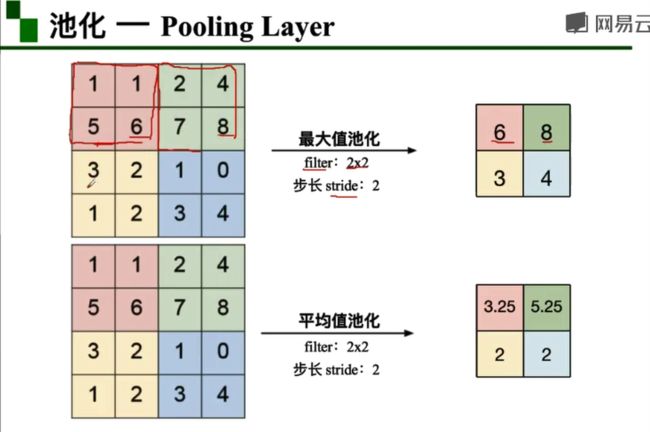
卷积神经网络-池化层
池化的过程更像是实现缩放的过程,在缩放的过程中保留了主要特征的同时减少参数和计算量,防止过拟合,提高模型泛化能力。池化层处于卷积层和卷积层之间 ,全连接层和全连接层之间。主要类型是最大值池化和平均值池化。池化层跟卷积层类似,也有filter和stride的概念。 常用的为最大值池化。
-
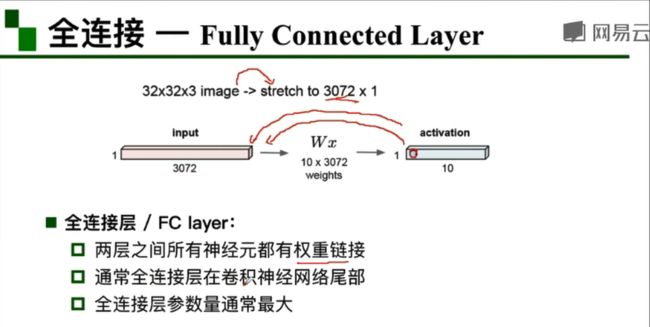
卷积神经网络-全连接层
全连接层通常在卷积神经网络的尾部。
-
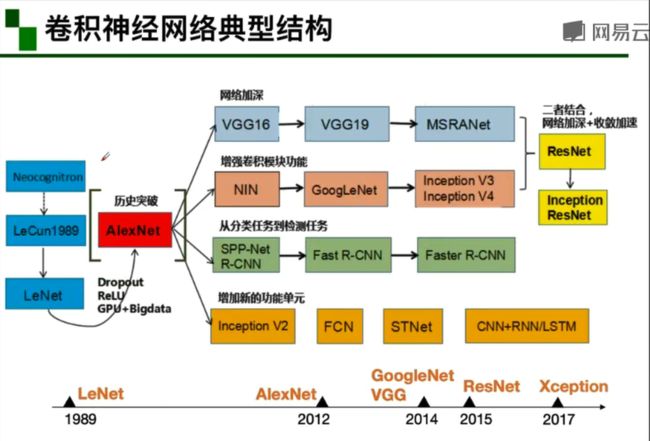
卷积神经网络典型结构
-
卷积神经网络典型结构-AlexNet
AlexNet是深度学习的一个转折点,之所以能够成功,原因在于:
1.大数据训练:百万级ImageNet图像数据
2.非线性激活函数:ReLu
优点:
解决了梯度消失问题(在正区间)
计算速度特别快,只需要判断输入是否大于0
收敛速度远快于sigmoid
3.防止过拟合:Dropout,Data augmentation
DropOut(随机失活)
训练时随机关闭部分神经元,测试时整合所有神经元
Data augmentation(数据增强)
平移、翻转、对称
改变RGB通道强度
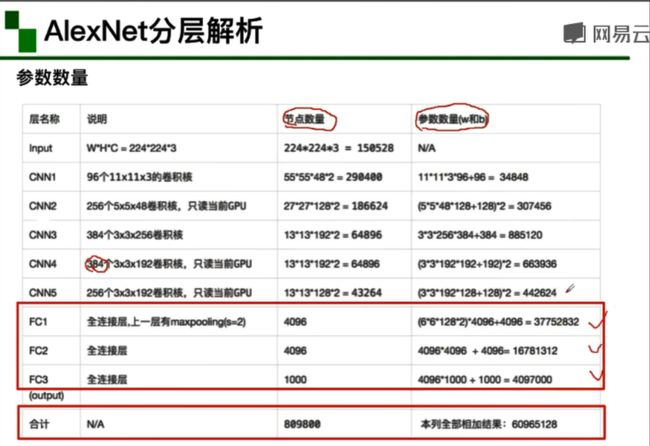
AlexNet分层解析
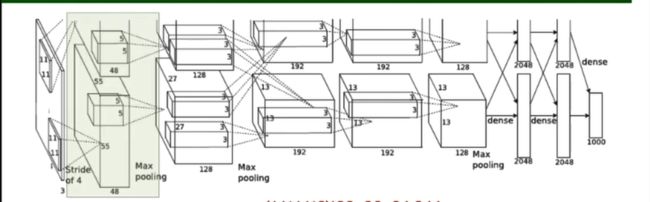
注意在池化层的参数为0。各层的feature map 的大小根据上面的公式计算即可。可以看出主要的参数位于全连接层。
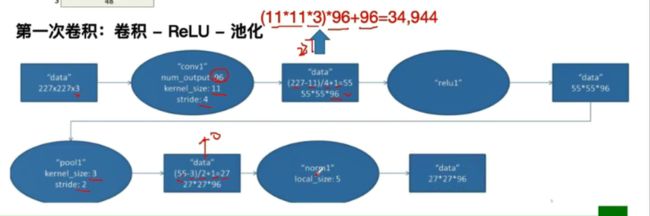
第一次卷积:卷积-ReLU-池化 224x224x3—55x55x96—27x27x96—27x27x96
第二次卷积:卷积-ReLU-池化 27x27x96—27x27x256—13x13x256—13x13x256
第三次卷积:卷积-ReLU 13x13x256—13x13x384—13x13x384
第四次卷积:卷积-ReLU 13x13x384—13x13x384—13x13x384
第五次卷积:卷积-ReLU-池化 13x13x384—13x13x256—13x13x256—6x6x256
第六次卷积:全连接-ReLU-DropOut 6x6x256—4096—4096—4096
第七次卷积:全连接-ReLU-DropOut 4096—4096—4096—4096
第八次卷积:全连接-SoftMax 4096—1000
-
卷积神经网络典型结构-ZFNet
网络结构与AlexNet相同
将卷积层1中的感受野大小由11*11改为7*7
卷积层3,4,5中的滤波器个数由384,384,256改为512,512,1024
-
卷积神经网络典型结构-VGG
VGG是一个更深的网络,将AlexNet的深度由8层加深到16和19层。
-
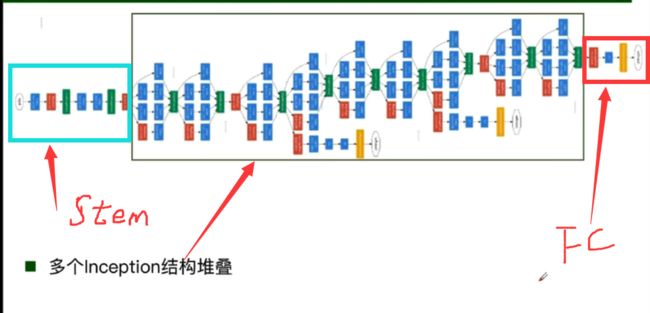
卷积神经网络典型结构-GoogleNet
GoogleNet不像VGG只在深度上做了加深,而是在结构上发生了改进,加入了多个inception模块和一个分类结构,包括两个辅助分类器(防止模型较深时出现的梯度消失问题),作用不是很大,所以在inception V3里去掉了辅助分类器。
网络总体结构:
网络包含22个带参数的层,(如果考虑池化层就是27层),独立成块的层数约有100个
参数量是AlexNet的1/12
除了分类的全连接层之外没有其他的全连接层
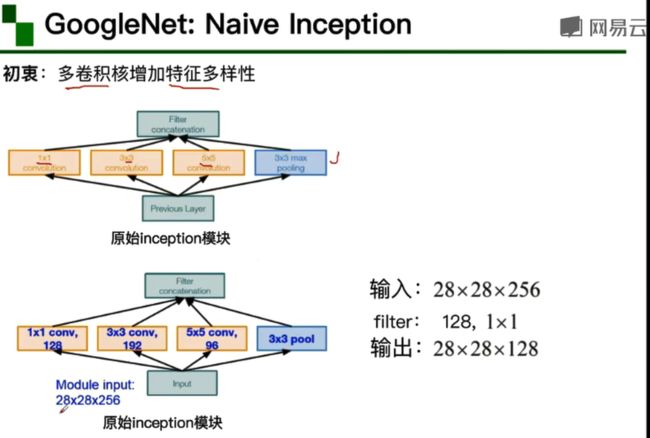
对channel上进行一个串联,就是28x28x(128+192+96+256)=28x28x678,经过max pooling之后672并不会改变,随着模型不断地加深,channel不断增大,计算量就会变得复杂。
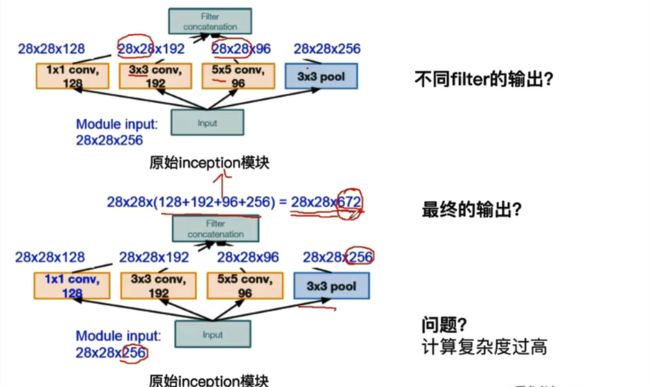
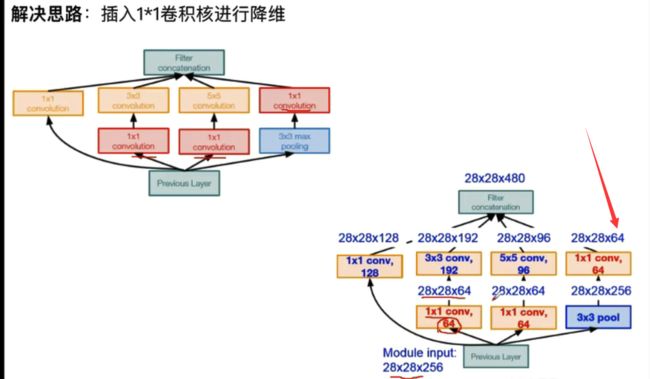
在inceptionV2中通过插入1*1的卷积核进行降维。在max pooling之后加上一个卷积核,从而可以改变深度,减少参数量。
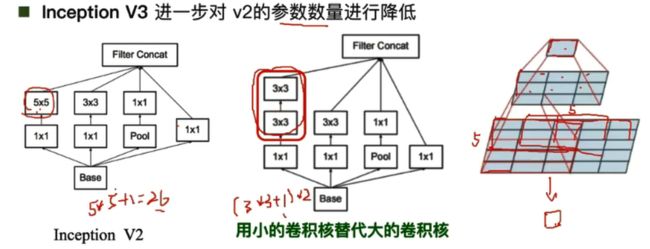
inceptionV3对V2的参数量进一步降低,对V2的5x5的卷积核变成两个3x3的卷积核。 两种情况得到的输出是一样的,且5x5的参数量=(5x5)+1=26,3x3的参数量=((3x3)+1)=20。从而降低了参数量。第二增加了非线性激活函数,使网络产生更多独立特征,表征能力更强。
Stem部分跟AlexNet很像,中间采用一些inception结构堆叠。最后一个全连接层输出类别数目。
-
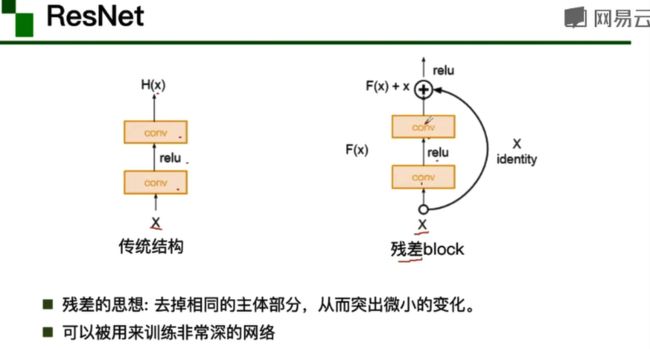
卷积神经网络典型结构-ResNet
残差学习网络,深度有152层。
$$
传统结构:f(g(h(x)))’=f‘g'h'
残差block:(f(g(h(x)+x)+x)+x)’=(f’+1)(g'+1)(h'+1)
$$
可以看出传统结构的导数可能出现的等于0 的情况,也就是会出现梯度消失的问题,而残差结构不会出现等于0的情况。
二、代码练习
2.1 MNIST数据集分类
2.1.1 加载数据
input_size = 28*28 # MNIST上的图像尺寸是 28x28
output_size = 10 # 类别为 0 到 9 的数字,因此为十类
train_loader = torch.utils.data.DataLoader(
datasets.MNIST('./data', train=True, download=True,
transform=transforms.Compose(
[transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))])),
batch_size=64, shuffle=True)
test_loader = torch.utils.data.DataLoader(
datasets.MNIST('./data', train=False, transform=transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))])),
batch_size=1000, shuffle=True)
PyTorch里包含了 MNIST, CIFAR10 等常用数据集,调用 torchvision.datasets 即可把这些数据由远程下载到本地,下面给出MNIST的使用方法: torchvision.datasets.MNIST(root, train=True, transform=None, target_transform=None, download=False) root 为数据集下载到本地后的根目录,包括 training.pt 和 test.pt 文件 train,如果设置为True,从training.pt创建数据集,否则从test.pt创建。 download,如果设置为True, 从互联网下载数据并放到root文件夹下 transform, 一种函数或变换,输入PIL图片,返回变换之后的数据。 target_transform 一种函数或变换,输入目标,进行变换。 另外值得注意的是,DataLoader是一个比较重要的类,提供的常用操作有:batch_size(每个batch的大小), shuffle(是否进行随机打乱顺序的操作), num_workers(加载数据的时候使用几个子进程)。
2.1.2显示数据集中的部分图像
plt.figure(figsize=(8, 5))
for i in range(20):
plt.subplot(4, 5, i + 1)
image, _ = train_loader.dataset.__getitem__(i)
plt.imshow(image.squeeze().numpy(),'gray')
plt.axis('off');
2.1.3创建网络
class FC2Layer(nn.Module):
def __init__(self, input_size, n_hidden, output_size):
# nn.Module子类的函数必须在构造函数中执行父类的构造函数
# 下式等价于nn.Module.__init__(self)
super(FC2Layer, self).__init__()
self.input_size = input_size
# 这里直接用 Sequential 就定义了网络,注意要和下面 CNN 的代码区分开
self.network = nn.Sequential(
nn.Linear(input_size, n_hidden),
nn.ReLU(),
nn.Linear(n_hidden, n_hidden),
nn.ReLU(),
nn.Linear(n_hidden, output_size),
nn.LogSoftmax(dim=1)
)
def forward(self, x):
# view一般出现在model类的forward函数中,用于改变输入或输出的形状
# x.view(-1, self.input_size) 的意思是多维的数据展成二维
# 代码指定二维数据的列数为 input_size=784,行数 -1 表示我们不想算,电脑会自己计算对应的数字
# 在 DataLoader 部分,我们可以看到 batch_size 是64,所以得到 x 的行数是64
# 大家可以加一行代码:print(x.cpu().numpy().shape)
# 训练过程中,就会看到 (64, 784) 的输出,和我们的预期是一致的
# forward 函数的作用是,指定网络的运行过程,这个全连接网络可能看不啥意义,
# 下面的CNN网络可以看出 forward 的作用。
x = x.view(-1, self.input_size)
return self.network(x)
class CNN(nn.Module):
def __init__(self, input_size, n_feature, output_size):
# 执行父类的构造函数,所有的网络都要这么写
super(CNN, self).__init__()
# 下面是网络里典型结构的一些定义,一般就是卷积和全连接
# 池化、ReLU一类的不用在这里定义
self.n_feature = n_feature
self.conv1 = nn.Conv2d(in_channels=1, out_channels=n_feature, kernel_size=5)
self.conv2 = nn.Conv2d(n_feature, n_feature, kernel_size=5)
self.fc1 = nn.Linear(n_feature*4*4, 50)
self.fc2 = nn.Linear(50, 10)
# 下面的 forward 函数,定义了网络的结构,按照一定顺序,把上面构建的一些结构组织起来
# 意思就是,conv1, conv2 等等的,可以多次重用
def forward(self, x, verbose=False):
x = self.conv1(x)
x = F.relu(x)
x = F.max_pool2d(x, kernel_size=2)
x = self.conv2(x)
x = F.relu(x)
x = F.max_pool2d(x, kernel_size=2)
x = x.view(-1, self.n_feature*4*4)
x = self.fc1(x)
x = F.relu(x)
x = self.fc2(x)
x = F.log_softmax(x, dim=1)
return x
2.1.4定义训练和测试函数
# 训练函数
def train(model):
model.train()
# 主里从train_loader里,64个样本一个batch为单位提取样本进行训练
for batch_idx, (data, target) in enumerate(train_loader):
# 把数据送到GPU中
data, target = data.to(device), target.to(device)
optimizer.zero_grad()
output = model(data)
loss = F.nll_loss(output, target)
loss.backward()
optimizer.step()
if batch_idx % 100 == 0:
print('Train: [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(
batch_idx * len(data), len(train_loader.dataset),
100. * batch_idx / len(train_loader), loss.item()))
def test(model):
model.eval()
test_loss = 0
correct = 0
for data, target in test_loader:
# 把数据送到GPU中
data, target = data.to(device), target.to(device)
# 把数据送入模型,得到预测结果
output = model(data)
# 计算本次batch的损失,并加到 test_loss 中
test_loss += F.nll_loss(output, target, reduction='sum').item()
# get the index of the max log-probability,最后一层输出10个数,
# 值最大的那个即对应着分类结果,然后把分类结果保存在 pred 里
pred = output.data.max(1, keepdim=True)[1]
# 将 pred 与 target 相比,得到正确预测结果的数量,并加到 correct 中
# 这里需要注意一下 view_as ,意思是把 target 变成维度和 pred 一样的意思
correct += pred.eq(target.data.view_as(pred)).cpu().sum().item()
test_loss /= len(test_loader.dataset)
accuracy = 100. * correct / len(test_loader.dataset)
print('\nTest set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n'.format(
test_loss, correct, len(test_loader.dataset),
accuracy))
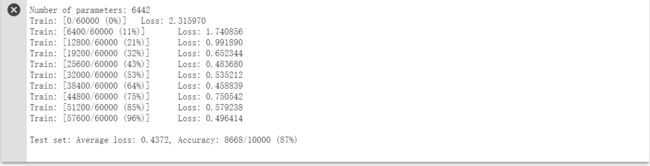
2.1.5在小型全连接网络上训练(Fully-connected network)
n_hidden = 8 # number of hidden units
model_fnn = FC2Layer(input_size, n_hidden, output_size)
model_fnn.to(device)
optimizer = optim.SGD(model_fnn.parameters(), lr=0.01, momentum=0.5)
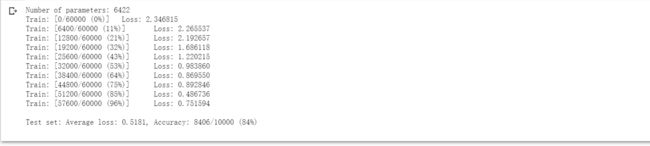
print('Number of parameters: {}'.format(get_n_params(model_fnn)))
train(model_fnn)
test(model_fnn)
2.1.6在卷积神经网络上训练与测试:
# Training settings
n_features = 6 # number of feature maps
model_cnn = CNN(input_size, n_features, output_size)
model_cnn.to(device)
optimizer = optim.SGD(model_cnn.parameters(), lr=0.01, momentum=0.5)
print('Number of parameters: {}'.format(get_n_params(model_cnn)))
train(model_cnn)
test(model_cnn)

2.1.7打乱像素顺序再次在两个网络上训练与测试
# 这里解释一下 torch.randperm 函数,给定参数n,返回一个从0到n-1的随机整数排列
perm = torch.randperm(784)
plt.figure(figsize=(8, 4))
for i in range(10):
image, _ = train_loader.dataset.__getitem__(i)
# permute pixels
image_perm = image.view(-1, 28*28).clone()
image_perm = image_perm[:, perm]
image_perm = image_perm.view(-1, 1, 28, 28)
plt.subplot(4, 5, i + 1)
plt.imshow(image.squeeze().numpy(), 'gray')
plt.axis('off')
plt.subplot(4, 5, i + 11)
plt.imshow(image_perm.squeeze().numpy(), 'gray')
plt.axis('off')

# 对每个 batch 里的数据,打乱像素顺序的函数
def perm_pixel(data, perm):
# 转化为二维矩阵
data_new = data.view(-1, 28*28)
# 打乱像素顺序
data_new = data_new[:, perm]
# 恢复为原来4维的 tensor
data_new = data_new.view(-1, 1, 28, 28)
return data_new
# 训练函数
def train_perm(model, perm):
model.train()
for batch_idx, (data, target) in enumerate(train_loader):
data, target = data.to(device), target.to(device)
# 像素打乱顺序
data = perm_pixel(data, perm)
optimizer.zero_grad()
output = model(data)
loss = F.nll_loss(output, target)
loss.backward()
optimizer.step()
if batch_idx % 100 == 0:
print('Train: [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(
batch_idx * len(data), len(train_loader.dataset),
100. * batch_idx / len(train_loader), loss.item()))
# 测试函数
def test_perm(model, perm):
model.eval()
test_loss = 0
correct = 0
for data, target in test_loader:
data, target = data.to(device), target.to(device)
# 像素打乱顺序
data = perm_pixel(data, perm)
output = model(data)
test_loss += F.nll_loss(output, target, reduction='sum').item()
pred = output.data.max(1, keepdim=True)[1]
correct += pred.eq(target.data.view_as(pred)).cpu().sum().item()
test_loss /= len(test_loader.dataset)
accuracy = 100. * correct / len(test_loader.dataset)
print('\nTest set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n'.format(
test_loss, correct, len(test_loader.dataset),
accuracy))
2.1.8在全连接网络上训练与测试
perm = torch.randperm(784)
n_hidden = 8 # number of hidden units
model_fnn = FC2Layer(input_size, n_hidden, output_size)
model_fnn.to(device)
optimizer = optim.SGD(model_fnn.parameters(), lr=0.01, momentum=0.5)
print('Number of parameters: {}'.format(get_n_params(model_fnn)))
train_perm(model_fnn, perm)
test_perm(model_fnn, perm)

2.1.9在卷积神经网络上训练与测试:
perm = torch.randperm(784)
n_features = 6 # number of feature maps
model_cnn = CNN(input_size, n_features, output_size)
model_cnn.to(device)
optimizer = optim.SGD(model_cnn.parameters(), lr=0.01, momentum=0.5)
print('Number of parameters: {}'.format(get_n_params(model_cnn)))
train_perm(model_cnn, perm)
test_perm(model_cnn, perm)
2.2 CIFAR10 数据集分类
2.2.1定义网络、损失函数和优化器
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(3, 6, 5)
self.pool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(6, 16, 5)
self.fc1 = nn.Linear(16 * 5 * 5, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = x.view(-1, 16 * 5 * 5)
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
# 网络放到GPU上
net = Net().to(device)
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(net.parameters(), lr=0.001)
2.2.2训练网络
for epoch in range(10): # 重复多轮训练
for i, (inputs, labels) in enumerate(trainloader):
inputs = inputs.to(device)
labels = labels.to(device)
# 优化器梯度归零
optimizer.zero_grad()
# 正向传播 + 反向传播 + 优化
outputs = net(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
# 输出统计信息
if i % 100 == 0:
print('Epoch: %d Minibatch: %5d loss: %.3f' %(epoch + 1, i + 1, loss.item()))
print('Finished Training')
2.2.3网络在数据集上的表现
correct = 0
total = 0
for data in testloader:
images, labels = data
images, labels = images.to(device), labels.to(device)
outputs = net(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Accuracy of the network on the 10000 test images: %d %%' % (
100 * correct / total))
Epoch: 1 Minibatch: 1 loss: 2.300
Epoch: 1 Minibatch: 101 loss: 1.944
Epoch: 1 Minibatch: 201 loss: 1.765
Epoch: 1 Minibatch: 301 loss: 1.846
Epoch: 1 Minibatch: 401 loss: 1.577
Epoch: 1 Minibatch: 501 loss: 1.566
Epoch: 1 Minibatch: 601 loss: 1.663
Epoch: 1 Minibatch: 701 loss: 1.921
Epoch: 2 Minibatch: 1 loss: 1.692
Epoch: 2 Minibatch: 101 loss: 1.282
Epoch: 2 Minibatch: 201 loss: 1.298
Epoch: 2 Minibatch: 301 loss: 1.272
Epoch: 2 Minibatch: 401 loss: 1.149
Epoch: 2 Minibatch: 501 loss: 1.290
Epoch: 2 Minibatch: 601 loss: 1.286
Epoch: 2 Minibatch: 701 loss: 1.142
Epoch: 3 Minibatch: 1 loss: 1.333
Epoch: 3 Minibatch: 101 loss: 1.329
Epoch: 3 Minibatch: 201 loss: 1.155
Epoch: 3 Minibatch: 301 loss: 1.485
Epoch: 3 Minibatch: 401 loss: 1.067
Epoch: 3 Minibatch: 501 loss: 1.128
Epoch: 3 Minibatch: 601 loss: 1.042
Epoch: 3 Minibatch: 701 loss: 1.071
Epoch: 4 Minibatch: 1 loss: 0.965
Epoch: 4 Minibatch: 101 loss: 1.206
Epoch: 4 Minibatch: 201 loss: 0.803
Epoch: 4 Minibatch: 301 loss: 0.957
Epoch: 4 Minibatch: 401 loss: 1.367
Epoch: 4 Minibatch: 501 loss: 1.183
Epoch: 4 Minibatch: 601 loss: 1.283
Epoch: 4 Minibatch: 701 loss: 1.266
Epoch: 5 Minibatch: 1 loss: 0.926
Epoch: 5 Minibatch: 101 loss: 1.308
Epoch: 5 Minibatch: 201 loss: 0.964
Epoch: 5 Minibatch: 301 loss: 1.091
Epoch: 5 Minibatch: 401 loss: 1.195
Epoch: 5 Minibatch: 501 loss: 1.081
Epoch: 5 Minibatch: 601 loss: 1.012
Epoch: 5 Minibatch: 701 loss: 1.215
Epoch: 6 Minibatch: 1 loss: 0.951
Epoch: 6 Minibatch: 101 loss: 1.154
Epoch: 6 Minibatch: 201 loss: 0.968
Epoch: 6 Minibatch: 301 loss: 1.096
Epoch: 6 Minibatch: 401 loss: 1.046
Epoch: 6 Minibatch: 501 loss: 0.985
Epoch: 6 Minibatch: 601 loss: 0.750
Epoch: 6 Minibatch: 701 loss: 0.901
Epoch: 7 Minibatch: 1 loss: 1.086
Epoch: 7 Minibatch: 101 loss: 1.038
Epoch: 7 Minibatch: 201 loss: 0.978
Epoch: 7 Minibatch: 301 loss: 1.006
Epoch: 7 Minibatch: 401 loss: 0.811
Epoch: 7 Minibatch: 501 loss: 0.958
Epoch: 7 Minibatch: 601 loss: 0.753
Epoch: 7 Minibatch: 701 loss: 0.985
Epoch: 8 Minibatch: 1 loss: 1.070
Epoch: 8 Minibatch: 101 loss: 0.981
Epoch: 8 Minibatch: 201 loss: 0.748
Epoch: 8 Minibatch: 301 loss: 0.844
Epoch: 8 Minibatch: 401 loss: 0.785
Epoch: 8 Minibatch: 501 loss: 0.887
Epoch: 8 Minibatch: 601 loss: 0.617
Epoch: 8 Minibatch: 701 loss: 0.939
Epoch: 9 Minibatch: 1 loss: 0.778
Epoch: 9 Minibatch: 101 loss: 0.586
Epoch: 9 Minibatch: 201 loss: 0.957
Epoch: 9 Minibatch: 301 loss: 1.123
Epoch: 9 Minibatch: 401 loss: 1.104
Epoch: 9 Minibatch: 501 loss: 0.842
Epoch: 9 Minibatch: 601 loss: 0.812
Epoch: 9 Minibatch: 701 loss: 0.825
Epoch: 10 Minibatch: 1 loss: 0.716
Epoch: 10 Minibatch: 101 loss: 0.833
Epoch: 10 Minibatch: 201 loss: 0.977
Epoch: 10 Minibatch: 301 loss: 0.910
Epoch: 10 Minibatch: 401 loss: 1.036
Epoch: 10 Minibatch: 501 loss: 0.896
Epoch: 10 Minibatch: 601 loss: 0.834
Epoch: 10 Minibatch: 701 loss: 0.872
Finished Training
2.2.4网络在整个数据集上的表现:
correct = 0
total = 0
for data in testloader:
images, labels = data
images, labels = images.to(device), labels.to(device)
outputs = net(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Accuracy of the network on the 10000 test images: %d %%' % (
100 * correct / total))
![]()
2.3使用 VGG16 对 CIFAR10 分类
2.3.1建立VGG16模型
class VGG(nn.Module):
def __init__(self):
super(VGG, self).__init__()
self.cfg = [64, 'M', 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M']
self.features = self._make_layers(cfg)
self.classifier = nn.Linear(2048, 10)
def forward(self, x):
out = self.features(x)
out = out.view(out.size(0), -1)
out = self.classifier(out)
return out
def _make_layers(self, cfg):
layers = []
in_channels = 3
for x in cfg:
if x == 'M':
layers += [nn.MaxPool2d(kernel_size=2, stride=2)]
else:
layers += [nn.Conv2d(in_channels, x, kernel_size=3, padding=1),
nn.BatchNorm2d(x),
nn.ReLU(inplace=True)]
in_channels = x
layers += [nn.AvgPool2d(kernel_size=1, stride=1)]
return nn.Sequential(*layers)
# 网络放到GPU上
net = VGG().to(device)
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(net.parameters(), lr=0.001)
2.3.2对数据集分类
correct = 0
total = 0
for data in testloader:
images, labels = data
images, labels = images.to(device), labels.to(device)
outputs = net(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Accuracy of the network on the 10000 test images: %.2f %%' % (
100 * correct / total))
Accuracy of the network on the 10000 test images: 84.48 %
2.4使用VGG模型迁移学习进行猫狗大战
import numpy as np
import matplotlib.pyplot as plt
import os
import torch
import torch.nn as nn
import torchvision
from torchvision import models,transforms,datasets
import time
import json
# 判断是否存在GPU设备
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print('Using gpu: %s ' % torch.cuda.is_available())
Using gpu: True
2.4.1下载数据
! wget https://static.leiphone.com/cat_dog.rar
pip install rarfile
Collecting rarfile
Downloading https://files.pythonhosted.org/packages/95/f4/c92fab227c7457e3b76a4096ccb655ded9deac869849cb03afbe55dfdc1e/rarfile-4.0-py3-none-any.whl
Installing collected packages: rarfile
Successfully installed rarfile-4.0
2.4.2解压文件
import rarfile
path = "cat_dog.rar"
path2 = "/content/"
rf = rarfile.RarFile(path)
rf.extractall(path2)
normalize = transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
vgg_format_train = transforms.Compose([
transforms.RandomRotation(30),# 随机旋转
transforms.CenterCrop(224),
transforms.ToTensor(),
normalize,
])
vgg_format = transforms.Compose([
transforms.CenterCrop(224),
transforms.ToTensor(),
normalize,
])
data_dir = './cat_dog/'
# 利用ImageFolder进行分类文件夹加载
# 两种加载数据集的方法
dsets = {x: datasets.ImageFolder(os.path.join(data_dir, x), vgg_format)
for x in ['train', 'val']}
tsets = {y: datasets.ImageFolder(os.path.join(data_dir, y), vgg_format)
for y in ['test']}
dset_classes = dsets['train'].classes
dset_sizes = {x: len(dsets[x]) for x in ['train', 'val']}
# 通过下面代码可以查看 dsets 的一些属性
print(dsets['train'].classes)
print(dsets['train'].class_to_idx)
print(dsets['train'].imgs[:5])
print('dset_sizes: ', dset_sizes)
['Cat', 'Dog']
{'Cat': 0, 'Dog': 1}
[('./cat_dog/train/Cat/cat_0.jpg', 0), ('./cat_dog/train/Cat/cat_1.jpg', 0), ('./cat_dog/train/Cat/cat_10.jpg', 0), ('./cat_dog/train/Cat/cat_100.jpg', 0), ('./cat_dog/train/Cat/cat_1000.jpg', 0)]
dset_sizes: {'train': 20000, 'val': 2000}
oader_train = torch.utils.data.DataLoader(dsets['train'], batch_size=64, shuffle=True, num_workers=6)
loader_valid = torch.utils.data.DataLoader(dsets['val'], batch_size=5, shuffle=False, num_workers=6)
loader_test = torch.utils.data.DataLoader(tsets['test'],batch_size=5,shuffle=False,num_workers=6)
'''
valid 数据一共有2000张图,每个batch是5张,因此,下面进行遍历一共会输出到 400
同时,把第一个 batch 保存到 inputs_try, labels_try,分别查看
'''
count = 1
for data in loader_valid:
#print(count, end='\n')
if count == 1:
inputs_try,labels_try = data
count +=1
print(labels_try)
print(inputs_try.shape)
tensor([0, 0, 0, 0, 0])
torch.Size([5, 3, 224, 224])
# 显示图片的小程序
def imshow(inp, title=None):
# Imshow for Tensor.
inp = inp.numpy().transpose((1, 2, 0))
mean = np.array([0.485, 0.456, 0.406])
std = np.array([0.229, 0.224, 0.225])
inp = np.clip(std * inp + mean, 0,1)
plt.imshow(inp)
if title is not None:
plt.title(title)
plt.pause(0.001) # pause a bit so that plots are updated
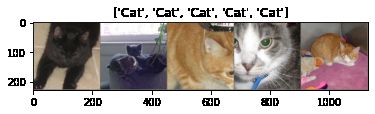
# 显示 labels_try 的5张图片,即valid里第一个batch的5张图片
out = torchvision.utils.make_grid(inputs_try)
imshow(out, title=[dset_classes[x] for x in labels_try])
2.4.3创建VGG Model
!wget https://s3.amazonaws.com/deep-learning-models/image-models/imagenet_class_index.json
model_vgg = models.vgg16(pretrained=True)
with open('./imagenet_class_index.json') as f:
class_dict = json.load(f)
dic_imagenet = [class_dict[str(i)][1] for i in range(len(class_dict))]
inputs_try , labels_try = inputs_try.to(device), labels_try.to(device)
model_vgg = model_vgg.to(device)
outputs_try = model_vgg(inputs_try)
#print(outputs_try)
#print(outputs_try.shape)
#tensor([[-4.6803, -3.0721, -4.2074, ..., -8.1783, -1.4379, 5.2827],
# [-2.4916, -3.3212, 1.3284, ..., -4.5295, -0.9055, 4.1661],
# [-1.4204, -0.0192, -2.6073, ..., -0.2028, 3.1158, 3.8306],
# [-4.0369, -2.0386, -2.7258, ..., -5.3328, 4.3880, 1.6959],
# [-1.8230, 4.3508, -3.3690, ..., -2.3910, 3.7018, 5.3185]],
# device='cuda:0', grad_fn=)
#torch.Size([5, 1000])
'''
可以看到结果为5行,1000列的数据,每一列代表对每一种目标识别的结果。
但是我也可以观察到,结果非常奇葩,有负数,有正数,
为了将VGG网络输出的结果转化为对每一类的预测概率,我们把结果输入到 Softmax 函数
'''
m_softm = nn.Softmax(dim=1)
probs = m_softm(outputs_try)
vals_try,pred_try = torch.max(probs,dim=1)
#print( 'prob sum: ', torch.sum(probs,1))
#prob sum: tensor([1.0000, 1.0000, 1.0000, 1.0000, 1.0000], device='cuda:0',
# grad_fn=)
#print( 'vals_try: ', vals_try)
#vals_try: tensor([0.9112, 0.2689, 0.4477, 0.5912, 0.4615], device='cuda:0',
# grad_fn=)
#print( 'pred_try: ', pred_try)
#pred_try: tensor([223, 223, 282, 285, 282], device='cuda:0')
print([dic_imagenet[i] for i in pred_try.data])
imshow(torchvision.utils.make_grid(inputs_try.data.cpu()),
title=[dset_classes[x] for x in labels_try.data.cpu()])

print(model_vgg)
model_vgg_new = model_vgg;
for param in model_vgg_new.parameters():
param.requires_grad = False
model_vgg_new.classifier._modules['6'] = nn.Linear(4096, 2)
model_vgg_new.classifier._modules['7'] = torch.nn.LogSoftmax(dim = 1)
model_vgg_new = model_vgg_new.to(device)
print(model_vgg_new.classifier)
2.4.4训练测试全连接层
'''
第一步:创建损失函数和优化器
损失函数 NLLLoss() 的 输入 是一个对数概率向量和一个目标标签.
它不会为我们计算对数概率,适合最后一层是log_softmax()的网络.
'''
criterion = nn.NLLLoss()
# 学习率
lr = 0.001
# 随机梯度下降
#optimizer_vgg = torch.optim.SGD(model_vgg_new.classifier[6].parameters(),lr = lr)
optimizer_vgg = torch.optim.Adam(model_vgg_new.classifier[6].parameters(),lr = lr)
'''
第二步:训练模型
'''
def train_model(model,dataloader,size,epochs=1,optimizer=None):
model.train()
for epoch in range(epochs):
running_loss = 0.0
running_corrects = 0
count = 0
for inputs,classes in dataloader:
inputs = inputs.to(device)
classes = classes.to(device)
outputs = model(inputs)
loss = criterion(outputs,classes)
optimizer = optimizer
optimizer.zero_grad()
loss.backward()
optimizer.step()
_,preds = torch.max(outputs.data,1)
# statistics
running_loss += loss.data.item()
running_corrects += torch.sum(preds == classes.data)
count += len(inputs)
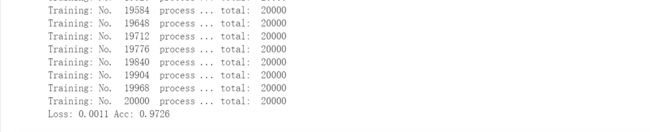
print('Training: No. ', count, ' process ... total: ', size)
epoch_loss = running_loss / size
epoch_acc = running_corrects.data.item() / size
print('Loss: {:.4f} Acc: {:.4f}'.format(
epoch_loss, epoch_acc))
# 模型训练
train_model(model_vgg_new,loader_train,size=dset_sizes['train'], epochs=1,
optimizer=optimizer_vgg)
def test_model(model,dataloader,size):
model.eval()
predictions = np.zeros(size)
all_classes = np.zeros(size)
all_proba = np.zeros((size,2))
i = 0
running_loss = 0.0
running_corrects = 0
for inputs,classes in dataloader:
inputs = inputs.to(device)
classes = classes.to(device)
outputs = model(inputs)
loss = criterion(outputs,classes)
_,preds = torch.max(outputs.data,1)
# statistics
running_loss += loss.data.item()
running_corrects += torch.sum(preds == classes.data)
predictions[i:i+len(classes)] = preds.to('cpu').numpy()
all_classes[i:i+len(classes)] = classes.to('cpu').numpy()
all_proba[i:i+len(classes),:] = outputs.data.to('cpu').numpy()
i += len(classes)
print('Testing: No. ', i, ' process ... total: ', size)
epoch_loss = running_loss / size
epoch_acc = running_corrects.data.item() / size
print('Loss: {:.4f} Acc: {:.4f}'.format(
epoch_loss, epoch_acc))
return predictions, all_proba, all_classes
# 测试网络(valid)
predictions, all_proba, all_classes = test_model(model_vgg_new,loader_valid,size=dset_sizes['val'])

三、总结
通过这周的学习,我对卷积神经网络的有了大致的了解,知道了卷积层、池化层、全连接层的作用工作原理,还有一些经典的卷积神经网络的结构,但是就一些数学知识来说,还是没能弄懂,需要在课下补习相关的知识,对于本周的代码作业,由于刚接触没多久,只看了一部分,还有一部分没能看完,但是都尝试在colab上运行过。