【视觉-结构光三维重建-理论篇】结构光 三维重建----论文调研3
动态目标 三维重建
Stripe boundary codes for real-time structured-light range scanning of moving objects
我们提出了一种新的实时结构光扫描方法。在分析现有结构光技术的基本假设之后,我们基于编码投影条纹之间的边界,导出了一组新的照明模式。这些条纹边界码允许对移动物体的距离扫描,只对场景连续性和反射率有适度的假设。我们描述了一个实现,集成了这些新的代码与实时算法跟踪条纹边界和确定深度。我们的系统使用一个标准的摄像机和DLP投影机,并产生密集的距离图像在60赫兹与100?精度超过10厘米工作体积。作为一个应用程序,我们演示了创建完整的刚性物体模型:物体在扫描器前面用手旋转,连续的距离图像会自动对齐。
采用结构光方法实现动态目标的三维轮廓重构
图像记录设备通常只能记录客观世界的二维信息,丢失了深度信息。在工业生产、逆向工程、医疗诊断等领域中的很多情况下需要采集目标物体的三维信息,三维轮廓重构技术随着实际应用的需求而不断发展。其中基于彩色编码结构光的三维重构技术由于具有非接触、精度高、易实现等优点日益成为研究热点。彩色编码的方法有两种:时序编码法和空间编码法。本文着重对空间编码方法进行了研究,最终构造了一种彩色空间编码法,实现了动态目标的三维重构。 论文的主要内容包含以下几个方面: 首先,分析了三维轮廓重构技术的发展历史和现状,比较了各类三维轮廓重构方法的优点和缺点,总结了彩色编码结构光在三维轮廓重构技术中的优势。详细介绍了彩色编码结构光法的原理,并完成了三维重构过程的数学建模。 其次,研究了时序编码法中编码图选用颜色种类的多少与投影图数量的关系,得出了一种较好的组合方式,并完成了一套时序编码方案,通过实际的实验,验证了此编码方案的可行性,同时研究了解码过程中对编码图像的处理方法,得到了很好的效果。 再次,本文的重点是构造了一套彩色空间编码方案完成了动态目标的三维轮廓重构。通过前两部分内容的分析与结论,研究了一种应用颜色种类少、解码精度高、以排列组合的方式生成空间编码图案的方法。编码图案中以四根彩色条纹为一个组合,同一个组合中不相邻的条纹允许有相同颜色的重复,这样在测量相同面积的目标物体时,能够减少编码所需颜色的种类,降低了解码过程中颜色识别的难度。最终通过实验证明了此方法对动态目标的三维重构行之有效。 最后,对实验结果进行了误差分析。通过对标定块三维重构数据结果的分析,得出了整个三维重构系统的测量精度。
三维面型重构中的分区正弦结构光编码算法
摘 要: 针对表面轮廓复杂度较高物体的三维面型重构时,单一条纹频率不能满足高精度测量要求,提出一种基于区域分割的正弦结构光编码算法。该算法根据被测物体不同区域表面轮廓特征,设置不同频率条纹,在图像区域分割的基础上编码对应光栅,根据相位调制方法,完成被测物体的三维面型重构。本论文完成了结构光的分区编码,实现表面轮廓较复杂物体的三维面型重构,所提算法对今后三维重构技术的进一步研究具有理论指导意义和实际应用价值。
复杂形体的三维视觉测量
摘要
结构光视觉测量系统采用一个投影仪代替双目视觉系统中的一台摄像机,主动投射光模式,光模式经过场景调制后,由摄像机捕获场景调制图,对捕获的模式图像进行解码,与投射模式特征量匹配,找出各个对应点,利用三角原理,完成三维重构。 结构光视觉测量系统能有效解决双目立体视觉测量匹配难的问题。采用的是主动投射的方式,投影仪投射模式特征已知,只要对捕获图像进行解码即可得到两幅具有对应关系的模式图像,利用编码的特征量可准确找出对应匹配点。 结构光视觉测量被认为是最可靠的三维测量技术之一,本文研究采用基于正弦光栅的时间编码方... 展开 结构光视觉测量系统采用一个投影仪代替双目视觉系统中的一台摄像机,主动投射光模式,光模式经过场景调制后,由摄像机捕获场景调制图,对捕获的模式图像进行解码,与投射模式特征量匹配,找出各个对应点,利用三角原理,完成三维重构。 结构光视觉测量系统能有效解决双目立体视觉测量匹配难的问题。采用的是主动投射的方式,投影仪投射模式特征已知,只要对捕获图像进行解码即可得到两幅具有对应关系的模式图像,利用编码的特征量可准确找出对应匹配点。 结构光视觉测量被认为是最可靠的三维测量技术之一,本文研究采用基于正弦光栅的时间编码方法,利用正弦光栅绝对相位作为特征量,编解码该特征量,由于正弦光栅绝对相位具有唯一性,以该唯一性作为匹配的依据,寻找对应点。采用三步相移光栅法投射物体,投射光栅分为水平和竖直两个方向,捕获场景调制后的图像,求出包裹相位图,对包裹相位图进行解缠,得到绝对相位图,由绝对相位图的相位特征寻找对应点。 由于复杂形体表面深度信息更繁杂多变,相位解缠错误或误差更易出现,解缠难度大。而相位解缠的精度和速度直接关系到最后测量的精度和速度,所以本文着重研究了相位解缠的算法。主要研究内容包括: 首先,概述了三维视觉测量的常用方法与原理,进而引申到相位测量中的相位解缠,对现有相位解缠算法进行分类归纳。总结出这些算法各自的优缺点,分析其理论依据与实践中算法鲁棒性和速度,为新算法的提出奠定基础。 其次,研究了质量图引导解缠算法的优化。质量图引导法是比较通用的高精度解缠算法,但其处理较大图像十分费时。采用优先级队列、索引链表等处理解缠次序,可有效降低算法的时间复杂度,减少处理时间。 再次,设计两种新的相位解缠算法。一种是螺旋形由点到面解缠法;一种基于构造边解缠法,由相邻两像素质量值构造水平与竖直权值边,根据边权值的大小引导相位解缠。解缠过程以两像素点所构成边为单位,逐次解缠所有像素点,有效解决了由于区域不连续、测量遮挡或环境噪声对解缠精度的影响。 最后,利用绝对相位唯一性,确定点在投射模式中的位置,生成匹配点坐标矩阵,进行三维重构。利用实验结果对比验证上述算法的有效性。
基于投影结构光法实现动态目标的三维重构
摘要
近年来,三维重构技术在逆向工程、机器人导航、医学图像处理、工业产品检测等领域都有着非常广泛的应用。投影结构光法三维重构技术由于其具备非接触、速度快、精度高、成本低等优势日益成为研究热点。本文重点对基于投影单幅彩色条纹结构光图案的空间编码三维重构技术进行了研究,在此基础上又提出了时空混合编码方法,通过图像处理等相关算法,最终实现了目标物体的三维重构。 论文内容主要包含以下几个方面: 首先,分析了目前三维重构技术的研究意义及发展趋势,对多种三维重构方法进行了简单的原理分析,并比较了它们的优缺点。对投影结构光法三维重构技术中的编码方法进行了分析讨论,确定了本文所采用的编码方法的理论基础。 其次,研究了一种基于De Bruijn序列的空间编码方法,这种编码具有采用颜色少、空间周期长以及解码精度高等优势。在此基础上提出一种时空混合编码方案,并分析了两种编码方法各自具备的优势以及适用场合。 再次,本文针对编码条纹的特性,采用抗干扰能力强的条纹边界提取算法、简单且有效的颜色识别方法以及高效的De Bruijn序列的解码算法,对采集到的图像进行处理,从而完成调制后的条纹图像的解码过程。 最后,搭建了三维重构实验平台,进行系统标定与设备标定,对多个具有一定难度的目标物体进行了实验,通过对比分析多组实验结果、计算测量误差,验证了本文提出方案的可行性。
基于彩色编码的结构光动态三维测量及重构技术研究
形体三维测量技术已广泛应用于反求工程、产品质量检测、物体识别等领域,但多为静态测量,无法实现运动或者变形物体的三维测量和形面重构。动态三维测量在高速检测,物体变形分析,仿生学,人体检测等领域具有很好的应用前景。论文对结构光动态三维测量系统的关键技术进行了深入研究。 基于彩色编码原理,将6色3次伪随机条纹序列的色彩信息溶入亮度呈余弦周期变化的数字栅线图中,构成彩色栅线空域编码的测量传感图案,在单幅图案内实现高分辨率的像素级唯一编码,满足动态三维测量要求。构建了投影栅相位法和双目立体视觉相结合的双摄像机单投影仪动态三维测量系统。 提出了一种仿人类视觉由粗到细分析过程的彩色栅线图像解码技术。在直觉阶段基于亮度峰值与色彩信息实现周期划分相展开,在专注阶段基于局部亮度变化关系进行空域解相。解码算法具有较高可靠性和抗噪能力,而且丰富色彩信息的引入解决了传统相展开算法复杂耗时、无法测量不连续物体的缺点。使用单平面标定块,采用Tsai两步法及非线性优化方法完成摄像机标定。 提出了基于特征点投影和基于虚拟摄像机标志点反向成像的两种投影仪标定技术,解决了投影仪标定中输入点三维坐标及二维投影坐标精确获取的难题。实验结果表明,研究的标定方法操作简便、具有较高的标定精度。 为了提高被测物体三维重构精度,基于极线几何约束,通过亚像素技术改善解码信息的定位和匹配精度。针对相位粗匹配中的精度缺陷,采用自适应调整的立体视觉窗口数字相关技术根据彩色栅线纹理在局域实现更精确的匹配。 针对散乱无序测量点云数据的三角网格模型的重构,提出了控制合适生长条件的循环扩展重构算法,以及基于曲线曲面拟合的大面积复杂形面孔洞缺陷光顺修补算法。实例表明算法能有效重构各类复杂点云,并实现高质量修补。 论文在彩色编码图设计、单幅图像解码、投影仪标定、自适应相关精匹配以及点云三角网格重构和修补部分作出了创新,所研究的动态三维测量系统具有较高测量精度与分辨率,可实现复杂形面或不连续物体的动态三维测量和重构。研究成果扩大了结构光三维测量技术的应用范围和实用性。
基于结构光投影的运动物体高速实时三维测量方法研究
作者姓名:刘永久
摘要 结构光三维形态测量技术己广泛应用于工业检测、模式识别以及逆向工程等领域,显示出了广泛的应用前景。随着工业生产自动化水平的提高,现有的基于标准帧率的三维形态测量技术己不能满足快速运动物体连续三维形态测量的需要,高速、实时三维测量正在成为三维测量技术的发展趋势。针对目前结构光三维测量方法无法兼顾运动物体测量与测量效率难题,本文基于格雷码编码结构光方法,对高速视觉三维测量、同步误差补偿算法、异构并行运算以及移动三维测量等关键技术进行了研究。以期实现运动物体的高速实时三维测量,并将该技术扩展至工业检测领域。
本文的主要研究内容及取得的成果如下: 1.采用了一种基于高速视觉的投影和同步图像获取方法,将格雷码结构光编码方法应用于运动物体三维测量中,利用缩短帧间投影与图像获取时间方法
减小同步误差。该方法可以突破了标准帧率的限制,实现运动物体的连续三维测量; 2.基于物体运动信息估计方法,提出了一种“运动补偿算法”,利用物体本身的运动速度信息补偿同步误差。实验结果表明该算法可通过物体运动速度信息预测帧间像素位置,实现同步误差补偿,进而获得更加准确的三维形态测量结果; 3.针对高速视觉中的大量图像数据处理问题,本文采用CPU+GPU异构
并行计算模型,充分利用GPU的多核并行计算能力,加速三维形态测量算法。在当前实验中,实现了512 x 512像素分辨率下500帧/秒的运动物体实时三维形态测量; 4.对移动三维形态测量技术进行了研究,开发了一种机器人搭载用的高集成度实时测量三维系统,利用机器人实时反馈的运动信息补偿同步误差,实验结果表明该方法能够克服基于质心跟踪方法中的估计盲区问题,进一步扩大了
三维形态测量范围。 论文在运动物体高速三维形态测量、同步误差补偿算法、异构并行运算以
及移动三维形态测量方面取得了一定的研究成果。研究成果扩展了格雷码编码结构光三维形态测量适用范围。
关键词:结构光投影,格雷码编码,运动补偿算法,高速视觉,GPU并行计算,
二、关键技术参数:
1.检测范围;2.检测精度;3.检测角度;4.帧率;5.模块大小;6.功耗
目前的主流摄像头在检测范围、检测精度和检测角度等都相差不大,主要区别在于:
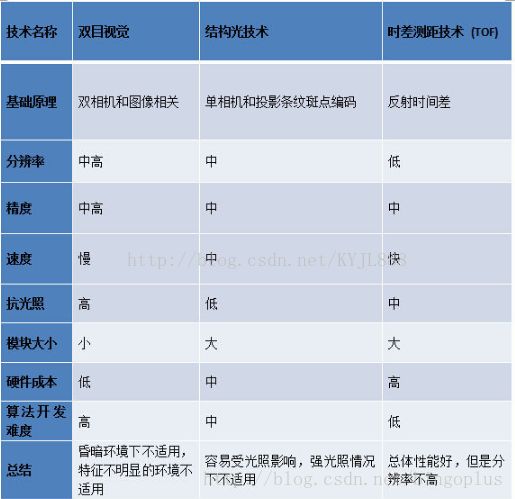
1、结构光方案优势在于技术成熟,深度图像分辨率可以做得比较高,但容易受光照影响,室外环境基本不能使用;
2、TOF方案抗干扰性能好,视角更宽,不足是深度图像分辨率较低,做一些简单避障和视觉导航可以用,不适合高精度场合。受环境影响小,传感器芯片并不成熟,成本很高,实现量产困难。
3、双目方案,成本相对前面两种方案最低,但是深度信息依赖纯软件算法得出,此算法复杂度高,难度很大,处理芯片需要很高的计算性能,同时它也继承了普通RGB摄像头的缺点:在昏暗环境下以及特征不明显的情况下并不适用。
三种方案对比:
三、总结:
1.双目方案:最大的问题在于实现算法需要很高的计算资源,导致实时性很差,而且基本跟分辨率,检测精度挂钩。也就是说,分辨率越高,要求精度越高,则计算越复杂,同时,纯双目方案受光照,物体纹理性质影响。
2.结构光方案:目的就是为了解决双目中匹配算法的复杂度和鲁棒性问题而提出,该方案解决了大多数环境下双目的上述问题。但是,在强光下,结构光核心技术激光散斑会被淹没。因此,不合适室外。同时,在长时间监控方面,激光发射设备容易坏,重新换设备后,需要重新标定。
3.TOF方案:传感器技术不是很成熟,因此,分辨率较低,成本高,但由于其原理与另外两种完全不同,实时性高,不需要额外增加计算资源,几乎无算法开发工作量,是未来。
动态目标 三维重建
Stripe boundary codes for real-time structured-light range scanning of moving objects
我们提出了一种新的实时结构光扫描方法。在分析现有结构光技术的基本假设之后,我们基于编码投影条纹之间的边界,导出了一组新的照明模式。这些条纹边界码允许对移动物体的距离扫描,只对场景连续性和反射率有适度的假设。我们描述了一个实现,集成了这些新的代码与实时算法跟踪条纹边界和确定深度。我们的系统使用一个标准的摄像机和DLP投影机,并产生密集的距离图像在60赫兹与100?精度超过10厘米工作体积。作为一个应用程序,我们演示了创建完整的刚性物体模型:物体在扫描器前面用手旋转,连续的距离图像会自动对齐。
采用结构光方法实现动态目标的三维轮廓重构
图像记录设备通常只能记录客观世界的二维信息,丢失了深度信息。在工业生产、逆向工程、医疗诊断等领域中的很多情况下需要采集目标物体的三维信息,三维轮廓重构技术随着实际应用的需求而不断发展。其中基于彩色编码结构光的三维重构技术由于具有非接触、精度高、易实现等优点日益成为研究热点。彩色编码的方法有两种:时序编码法和空间编码法。本文着重对空间编码方法进行了研究,最终构造了一种彩色空间编码法,实现了动态目标的三维重构。 论文的主要内容包含以下几个方面: 首先,分析了三维轮廓重构技术的发展历史和现状,比较了各类三维轮廓重构方法的优点和缺点,总结了彩色编码结构光在三维轮廓重构技术中的优势。详细介绍了彩色编码结构光法的原理,并完成了三维重构过程的数学建模。 其次,研究了时序编码法中编码图选用颜色种类的多少与投影图数量的关系,得出了一种较好的组合方式,并完成了一套时序编码方案,通过实际的实验,验证了此编码方案的可行性,同时研究了解码过程中对编码图像的处理方法,得到了很好的效果。 再次,本文的重点是构造了一套彩色空间编码方案完成了动态目标的三维轮廓重构。通过前两部分内容的分析与结论,研究了一种应用颜色种类少、解码精度高、以排列组合的方式生成空间编码图案的方法。编码图案中以四根彩色条纹为一个组合,同一个组合中不相邻的条纹允许有相同颜色的重复,这样在测量相同面积的目标物体时,能够减少编码所需颜色的种类,降低了解码过程中颜色识别的难度。最终通过实验证明了此方法对动态目标的三维重构行之有效。 最后,对实验结果进行了误差分析。通过对标定块三维重构数据结果的分析,得出了整个三维重构系统的测量精度。
三维面型重构中的分区正弦结构光编码算法
摘 要: 针对表面轮廓复杂度较高物体的三维面型重构时,单一条纹频率不能满足高精度测量要求,提出一种基于区域分割的正弦结构光编码算法。该算法根据被测物体不同区域表面轮廓特征,设置不同频率条纹,在图像区域分割的基础上编码对应光栅,根据相位调制方法,完成被测物体的三维面型重构。本论文完成了结构光的分区编码,实现表面轮廓较复杂物体的三维面型重构,所提算法对今后三维重构技术的进一步研究具有理论指导意义和实际应用价值。
复杂形体的三维视觉测量
摘要
结构光视觉测量系统采用一个投影仪代替双目视觉系统中的一台摄像机,主动投射光模式,光模式经过场景调制后,由摄像机捕获场景调制图,对捕获的模式图像进行解码,与投射模式特征量匹配,找出各个对应点,利用三角原理,完成三维重构。 结构光视觉测量系统能有效解决双目立体视觉测量匹配难的问题。采用的是主动投射的方式,投影仪投射模式特征已知,只要对捕获图像进行解码即可得到两幅具有对应关系的模式图像,利用编码的特征量可准确找出对应匹配点。 结构光视觉测量被认为是最可靠的三维测量技术之一,本文研究采用基于正弦光栅的时间编码方... 展开 结构光视觉测量系统采用一个投影仪代替双目视觉系统中的一台摄像机,主动投射光模式,光模式经过场景调制后,由摄像机捕获场景调制图,对捕获的模式图像进行解码,与投射模式特征量匹配,找出各个对应点,利用三角原理,完成三维重构。 结构光视觉测量系统能有效解决双目立体视觉测量匹配难的问题。采用的是主动投射的方式,投影仪投射模式特征已知,只要对捕获图像进行解码即可得到两幅具有对应关系的模式图像,利用编码的特征量可准确找出对应匹配点。 结构光视觉测量被认为是最可靠的三维测量技术之一,本文研究采用基于正弦光栅的时间编码方法,利用正弦光栅绝对相位作为特征量,编解码该特征量,由于正弦光栅绝对相位具有唯一性,以该唯一性作为匹配的依据,寻找对应点。采用三步相移光栅法投射物体,投射光栅分为水平和竖直两个方向,捕获场景调制后的图像,求出包裹相位图,对包裹相位图进行解缠,得到绝对相位图,由绝对相位图的相位特征寻找对应点。 由于复杂形体表面深度信息更繁杂多变,相位解缠错误或误差更易出现,解缠难度大。而相位解缠的精度和速度直接关系到最后测量的精度和速度,所以本文着重研究了相位解缠的算法。主要研究内容包括: 首先,概述了三维视觉测量的常用方法与原理,进而引申到相位测量中的相位解缠,对现有相位解缠算法进行分类归纳。总结出这些算法各自的优缺点,分析其理论依据与实践中算法鲁棒性和速度,为新算法的提出奠定基础。 其次,研究了质量图引导解缠算法的优化。质量图引导法是比较通用的高精度解缠算法,但其处理较大图像十分费时。采用优先级队列、索引链表等处理解缠次序,可有效降低算法的时间复杂度,减少处理时间。 再次,设计两种新的相位解缠算法。一种是螺旋形由点到面解缠法;一种基于构造边解缠法,由相邻两像素质量值构造水平与竖直权值边,根据边权值的大小引导相位解缠。解缠过程以两像素点所构成边为单位,逐次解缠所有像素点,有效解决了由于区域不连续、测量遮挡或环境噪声对解缠精度的影响。 最后,利用绝对相位唯一性,确定点在投射模式中的位置,生成匹配点坐标矩阵,进行三维重构。利用实验结果对比验证上述算法的有效性。
基于投影结构光法实现动态目标的三维重构
摘要
近年来,三维重构技术在逆向工程、机器人导航、医学图像处理、工业产品检测等领域都有着非常广泛的应用。投影结构光法三维重构技术由于其具备非接触、速度快、精度高、成本低等优势日益成为研究热点。本文重点对基于投影单幅彩色条纹结构光图案的空间编码三维重构技术进行了研究,在此基础上又提出了时空混合编码方法,通过图像处理等相关算法,最终实现了目标物体的三维重构。 论文内容主要包含以下几个方面: 首先,分析了目前三维重构技术的研究意义及发展趋势,对多种三维重构方法进行了简单的原理分析,并比较了它们的优缺点。对投影结构光法三维重构技术中的编码方法进行了分析讨论,确定了本文所采用的编码方法的理论基础。 其次,研究了一种基于De Bruijn序列的空间编码方法,这种编码具有采用颜色少、空间周期长以及解码精度高等优势。在此基础上提出一种时空混合编码方案,并分析了两种编码方法各自具备的优势以及适用场合。 再次,本文针对编码条纹的特性,采用抗干扰能力强的条纹边界提取算法、简单且有效的颜色识别方法以及高效的De Bruijn序列的解码算法,对采集到的图像进行处理,从而完成调制后的条纹图像的解码过程。 最后,搭建了三维重构实验平台,进行系统标定与设备标定,对多个具有一定难度的目标物体进行了实验,通过对比分析多组实验结果、计算测量误差,验证了本文提出方案的可行性。
基于彩色编码的结构光动态三维测量及重构技术研究
形体三维测量技术已广泛应用于反求工程、产品质量检测、物体识别等领域,但多为静态测量,无法实现运动或者变形物体的三维测量和形面重构。动态三维测量在高速检测,物体变形分析,仿生学,人体检测等领域具有很好的应用前景。论文对结构光动态三维测量系统的关键技术进行了深入研究。 基于彩色编码原理,将6色3次伪随机条纹序列的色彩信息溶入亮度呈余弦周期变化的数字栅线图中,构成彩色栅线空域编码的测量传感图案,在单幅图案内实现高分辨率的像素级唯一编码,满足动态三维测量要求。构建了投影栅相位法和双目立体视觉相结合的双摄像机单投影仪动态三维测量系统。 提出了一种仿人类视觉由粗到细分析过程的彩色栅线图像解码技术。在直觉阶段基于亮度峰值与色彩信息实现周期划分相展开,在专注阶段基于局部亮度变化关系进行空域解相。解码算法具有较高可靠性和抗噪能力,而且丰富色彩信息的引入解决了传统相展开算法复杂耗时、无法测量不连续物体的缺点。使用单平面标定块,采用Tsai两步法及非线性优化方法完成摄像机标定。 提出了基于特征点投影和基于虚拟摄像机标志点反向成像的两种投影仪标定技术,解决了投影仪标定中输入点三维坐标及二维投影坐标精确获取的难题。实验结果表明,研究的标定方法操作简便、具有较高的标定精度。 为了提高被测物体三维重构精度,基于极线几何约束,通过亚像素技术改善解码信息的定位和匹配精度。针对相位粗匹配中的精度缺陷,采用自适应调整的立体视觉窗口数字相关技术根据彩色栅线纹理在局域实现更精确的匹配。 针对散乱无序测量点云数据的三角网格模型的重构,提出了控制合适生长条件的循环扩展重构算法,以及基于曲线曲面拟合的大面积复杂形面孔洞缺陷光顺修补算法。实例表明算法能有效重构各类复杂点云,并实现高质量修补。 论文在彩色编码图设计、单幅图像解码、投影仪标定、自适应相关精匹配以及点云三角网格重构和修补部分作出了创新,所研究的动态三维测量系统具有较高测量精度与分辨率,可实现复杂形面或不连续物体的动态三维测量和重构。研究成果扩大了结构光三维测量技术的应用范围和实用性。
基于结构光投影的运动物体高速实时三维测量方法研究
作者姓名:刘永久
摘要 结构光三维形态测量技术己广泛应用于工业检测、模式识别以及逆向工程等领域,显示出了广泛的应用前景。随着工业生产自动化水平的提高,现有的基于标准帧率的三维形态测量技术己不能满足快速运动物体连续三维形态测量的需要,高速、实时三维测量正在成为三维测量技术的发展趋势。针对目前结构光三维测量方法无法兼顾运动物体测量与测量效率难题,本文基于格雷码编码结构光方法,对高速视觉三维测量、同步误差补偿算法、异构并行运算以及移动三维测量等关键技术进行了研究。以期实现运动物体的高速实时三维测量,并将该技术扩展至工业检测领域。
本文的主要研究内容及取得的成果如下: 1.采用了一种基于高速视觉的投影和同步图像获取方法,将格雷码结构光编码方法应用于运动物体三维测量中,利用缩短帧间投影与图像获取时间方法
减小同步误差。该方法可以突破了标准帧率的限制,实现运动物体的连续三维测量; 2.基于物体运动信息估计方法,提出了一种“运动补偿算法”,利用物体本身的运动速度信息补偿同步误差。实验结果表明该算法可通过物体运动速度信息预测帧间像素位置,实现同步误差补偿,进而获得更加准确的三维形态测量结果; 3.针对高速视觉中的大量图像数据处理问题,本文采用CPU+GPU异构
并行计算模型,充分利用GPU的多核并行计算能力,加速三维形态测量算法。在当前实验中,实现了512 x 512像素分辨率下500帧/秒的运动物体实时三维形态测量; 4.对移动三维形态测量技术进行了研究,开发了一种机器人搭载用的高集成度实时测量三维系统,利用机器人实时反馈的运动信息补偿同步误差,实验结果表明该方法能够克服基于质心跟踪方法中的估计盲区问题,进一步扩大了
三维形态测量范围。 论文在运动物体高速三维形态测量、同步误差补偿算法、异构并行运算以
及移动三维形态测量方面取得了一定的研究成果。研究成果扩展了格雷码编码结构光三维形态测量适用范围。
关键词:结构光投影,格雷码编码,运动补偿算法,高速视觉,GPU并行计算,
二、关键技术参数:
1.检测范围;2.检测精度;3.检测角度;4.帧率;5.模块大小;6.功耗
目前的主流摄像头在检测范围、检测精度和检测角度等都相差不大,主要区别在于:
1、结构光方案优势在于技术成熟,深度图像分辨率可以做得比较高,但容易受光照影响,室外环境基本不能使用;
2、TOF方案抗干扰性能好,视角更宽,不足是深度图像分辨率较低,做一些简单避障和视觉导航可以用,不适合高精度场合。受环境影响小,传感器芯片并不成熟,成本很高,实现量产困难。
3、双目方案,成本相对前面两种方案最低,但是深度信息依赖纯软件算法得出,此算法复杂度高,难度很大,处理芯片需要很高的计算性能,同时它也继承了普通RGB摄像头的缺点:在昏暗环境下以及特征不明显的情况下并不适用。
三种方案对比:
三、总结:
1.双目方案:最大的问题在于实现算法需要很高的计算资源,导致实时性很差,而且基本跟分辨率,检测精度挂钩。也就是说,分辨率越高,要求精度越高,则计算越复杂,同时,纯双目方案受光照,物体纹理性质影响。
2.结构光方案:目的就是为了解决双目中匹配算法的复杂度和鲁棒性问题而提出,该方案解决了大多数环境下双目的上述问题。但是,在强光下,结构光核心技术激光散斑会被淹没。因此,不合适室外。同时,在长时间监控方面,激光发射设备容易坏,重新换设备后,需要重新标定。
3.TOF方案:传感器技术不是很成熟,因此,分辨率较低,成本高,但由于其原理与另外两种完全不同,实时性高,不需要额外增加计算资源,几乎无算法开发工作量,是未来。
动态目标 三维重建
Stripe boundary codes for real-time structured-light range scanning of moving objects
我们提出了一种新的实时结构光扫描方法。在分析现有结构光技术的基本假设之后,我们基于编码投影条纹之间的边界,导出了一组新的照明模式。这些条纹边界码允许对移动物体的距离扫描,只对场景连续性和反射率有适度的假设。我们描述了一个实现,集成了这些新的代码与实时算法跟踪条纹边界和确定深度。我们的系统使用一个标准的摄像机和DLP投影机,并产生密集的距离图像在60赫兹与100?精度超过10厘米工作体积。作为一个应用程序,我们演示了创建完整的刚性物体模型:物体在扫描器前面用手旋转,连续的距离图像会自动对齐。
采用结构光方法实现动态目标的三维轮廓重构
图像记录设备通常只能记录客观世界的二维信息,丢失了深度信息。在工业生产、逆向工程、医疗诊断等领域中的很多情况下需要采集目标物体的三维信息,三维轮廓重构技术随着实际应用的需求而不断发展。其中基于彩色编码结构光的三维重构技术由于具有非接触、精度高、易实现等优点日益成为研究热点。彩色编码的方法有两种:时序编码法和空间编码法。本文着重对空间编码方法进行了研究,最终构造了一种彩色空间编码法,实现了动态目标的三维重构。 论文的主要内容包含以下几个方面: 首先,分析了三维轮廓重构技术的发展历史和现状,比较了各类三维轮廓重构方法的优点和缺点,总结了彩色编码结构光在三维轮廓重构技术中的优势。详细介绍了彩色编码结构光法的原理,并完成了三维重构过程的数学建模。 其次,研究了时序编码法中编码图选用颜色种类的多少与投影图数量的关系,得出了一种较好的组合方式,并完成了一套时序编码方案,通过实际的实验,验证了此编码方案的可行性,同时研究了解码过程中对编码图像的处理方法,得到了很好的效果。 再次,本文的重点是构造了一套彩色空间编码方案完成了动态目标的三维轮廓重构。通过前两部分内容的分析与结论,研究了一种应用颜色种类少、解码精度高、以排列组合的方式生成空间编码图案的方法。编码图案中以四根彩色条纹为一个组合,同一个组合中不相邻的条纹允许有相同颜色的重复,这样在测量相同面积的目标物体时,能够减少编码所需颜色的种类,降低了解码过程中颜色识别的难度。最终通过实验证明了此方法对动态目标的三维重构行之有效。 最后,对实验结果进行了误差分析。通过对标定块三维重构数据结果的分析,得出了整个三维重构系统的测量精度。
三维面型重构中的分区正弦结构光编码算法
摘 要: 针对表面轮廓复杂度较高物体的三维面型重构时,单一条纹频率不能满足高精度测量要求,提出一种基于区域分割的正弦结构光编码算法。该算法根据被测物体不同区域表面轮廓特征,设置不同频率条纹,在图像区域分割的基础上编码对应光栅,根据相位调制方法,完成被测物体的三维面型重构。本论文完成了结构光的分区编码,实现表面轮廓较复杂物体的三维面型重构,所提算法对今后三维重构技术的进一步研究具有理论指导意义和实际应用价值。
复杂形体的三维视觉测量
摘要
结构光视觉测量系统采用一个投影仪代替双目视觉系统中的一台摄像机,主动投射光模式,光模式经过场景调制后,由摄像机捕获场景调制图,对捕获的模式图像进行解码,与投射模式特征量匹配,找出各个对应点,利用三角原理,完成三维重构。 结构光视觉测量系统能有效解决双目立体视觉测量匹配难的问题。采用的是主动投射的方式,投影仪投射模式特征已知,只要对捕获图像进行解码即可得到两幅具有对应关系的模式图像,利用编码的特征量可准确找出对应匹配点。 结构光视觉测量被认为是最可靠的三维测量技术之一,本文研究采用基于正弦光栅的时间编码方... 展开 结构光视觉测量系统采用一个投影仪代替双目视觉系统中的一台摄像机,主动投射光模式,光模式经过场景调制后,由摄像机捕获场景调制图,对捕获的模式图像进行解码,与投射模式特征量匹配,找出各个对应点,利用三角原理,完成三维重构。 结构光视觉测量系统能有效解决双目立体视觉测量匹配难的问题。采用的是主动投射的方式,投影仪投射模式特征已知,只要对捕获图像进行解码即可得到两幅具有对应关系的模式图像,利用编码的特征量可准确找出对应匹配点。 结构光视觉测量被认为是最可靠的三维测量技术之一,本文研究采用基于正弦光栅的时间编码方法,利用正弦光栅绝对相位作为特征量,编解码该特征量,由于正弦光栅绝对相位具有唯一性,以该唯一性作为匹配的依据,寻找对应点。采用三步相移光栅法投射物体,投射光栅分为水平和竖直两个方向,捕获场景调制后的图像,求出包裹相位图,对包裹相位图进行解缠,得到绝对相位图,由绝对相位图的相位特征寻找对应点。 由于复杂形体表面深度信息更繁杂多变,相位解缠错误或误差更易出现,解缠难度大。而相位解缠的精度和速度直接关系到最后测量的精度和速度,所以本文着重研究了相位解缠的算法。主要研究内容包括: 首先,概述了三维视觉测量的常用方法与原理,进而引申到相位测量中的相位解缠,对现有相位解缠算法进行分类归纳。总结出这些算法各自的优缺点,分析其理论依据与实践中算法鲁棒性和速度,为新算法的提出奠定基础。 其次,研究了质量图引导解缠算法的优化。质量图引导法是比较通用的高精度解缠算法,但其处理较大图像十分费时。采用优先级队列、索引链表等处理解缠次序,可有效降低算法的时间复杂度,减少处理时间。 再次,设计两种新的相位解缠算法。一种是螺旋形由点到面解缠法;一种基于构造边解缠法,由相邻两像素质量值构造水平与竖直权值边,根据边权值的大小引导相位解缠。解缠过程以两像素点所构成边为单位,逐次解缠所有像素点,有效解决了由于区域不连续、测量遮挡或环境噪声对解缠精度的影响。 最后,利用绝对相位唯一性,确定点在投射模式中的位置,生成匹配点坐标矩阵,进行三维重构。利用实验结果对比验证上述算法的有效性。
基于投影结构光法实现动态目标的三维重构
摘要
近年来,三维重构技术在逆向工程、机器人导航、医学图像处理、工业产品检测等领域都有着非常广泛的应用。投影结构光法三维重构技术由于其具备非接触、速度快、精度高、成本低等优势日益成为研究热点。本文重点对基于投影单幅彩色条纹结构光图案的空间编码三维重构技术进行了研究,在此基础上又提出了时空混合编码方法,通过图像处理等相关算法,最终实现了目标物体的三维重构。 论文内容主要包含以下几个方面: 首先,分析了目前三维重构技术的研究意义及发展趋势,对多种三维重构方法进行了简单的原理分析,并比较了它们的优缺点。对投影结构光法三维重构技术中的编码方法进行了分析讨论,确定了本文所采用的编码方法的理论基础。 其次,研究了一种基于De Bruijn序列的空间编码方法,这种编码具有采用颜色少、空间周期长以及解码精度高等优势。在此基础上提出一种时空混合编码方案,并分析了两种编码方法各自具备的优势以及适用场合。 再次,本文针对编码条纹的特性,采用抗干扰能力强的条纹边界提取算法、简单且有效的颜色识别方法以及高效的De Bruijn序列的解码算法,对采集到的图像进行处理,从而完成调制后的条纹图像的解码过程。 最后,搭建了三维重构实验平台,进行系统标定与设备标定,对多个具有一定难度的目标物体进行了实验,通过对比分析多组实验结果、计算测量误差,验证了本文提出方案的可行性。
基于彩色编码的结构光动态三维测量及重构技术研究
形体三维测量技术已广泛应用于反求工程、产品质量检测、物体识别等领域,但多为静态测量,无法实现运动或者变形物体的三维测量和形面重构。动态三维测量在高速检测,物体变形分析,仿生学,人体检测等领域具有很好的应用前景。论文对结构光动态三维测量系统的关键技术进行了深入研究。 基于彩色编码原理,将6色3次伪随机条纹序列的色彩信息溶入亮度呈余弦周期变化的数字栅线图中,构成彩色栅线空域编码的测量传感图案,在单幅图案内实现高分辨率的像素级唯一编码,满足动态三维测量要求。构建了投影栅相位法和双目立体视觉相结合的双摄像机单投影仪动态三维测量系统。 提出了一种仿人类视觉由粗到细分析过程的彩色栅线图像解码技术。在直觉阶段基于亮度峰值与色彩信息实现周期划分相展开,在专注阶段基于局部亮度变化关系进行空域解相。解码算法具有较高可靠性和抗噪能力,而且丰富色彩信息的引入解决了传统相展开算法复杂耗时、无法测量不连续物体的缺点。使用单平面标定块,采用Tsai两步法及非线性优化方法完成摄像机标定。 提出了基于特征点投影和基于虚拟摄像机标志点反向成像的两种投影仪标定技术,解决了投影仪标定中输入点三维坐标及二维投影坐标精确获取的难题。实验结果表明,研究的标定方法操作简便、具有较高的标定精度。 为了提高被测物体三维重构精度,基于极线几何约束,通过亚像素技术改善解码信息的定位和匹配精度。针对相位粗匹配中的精度缺陷,采用自适应调整的立体视觉窗口数字相关技术根据彩色栅线纹理在局域实现更精确的匹配。 针对散乱无序测量点云数据的三角网格模型的重构,提出了控制合适生长条件的循环扩展重构算法,以及基于曲线曲面拟合的大面积复杂形面孔洞缺陷光顺修补算法。实例表明算法能有效重构各类复杂点云,并实现高质量修补。 论文在彩色编码图设计、单幅图像解码、投影仪标定、自适应相关精匹配以及点云三角网格重构和修补部分作出了创新,所研究的动态三维测量系统具有较高测量精度与分辨率,可实现复杂形面或不连续物体的动态三维测量和重构。研究成果扩大了结构光三维测量技术的应用范围和实用性。
基于结构光投影的运动物体高速实时三维测量方法研究
作者姓名:刘永久
摘要 结构光三维形态测量技术己广泛应用于工业检测、模式识别以及逆向工程等领域,显示出了广泛的应用前景。随着工业生产自动化水平的提高,现有的基于标准帧率的三维形态测量技术己不能满足快速运动物体连续三维形态测量的需要,高速、实时三维测量正在成为三维测量技术的发展趋势。针对目前结构光三维测量方法无法兼顾运动物体测量与测量效率难题,本文基于格雷码编码结构光方法,对高速视觉三维测量、同步误差补偿算法、异构并行运算以及移动三维测量等关键技术进行了研究。以期实现运动物体的高速实时三维测量,并将该技术扩展至工业检测领域。
本文的主要研究内容及取得的成果如下: 1.采用了一种基于高速视觉的投影和同步图像获取方法,将格雷码结构光编码方法应用于运动物体三维测量中,利用缩短帧间投影与图像获取时间方法
减小同步误差。该方法可以突破了标准帧率的限制,实现运动物体的连续三维测量; 2.基于物体运动信息估计方法,提出了一种“运动补偿算法”,利用物体本身的运动速度信息补偿同步误差。实验结果表明该算法可通过物体运动速度信息预测帧间像素位置,实现同步误差补偿,进而获得更加准确的三维形态测量结果; 3.针对高速视觉中的大量图像数据处理问题,本文采用CPU+GPU异构
并行计算模型,充分利用GPU的多核并行计算能力,加速三维形态测量算法。在当前实验中,实现了512 x 512像素分辨率下500帧/秒的运动物体实时三维形态测量; 4.对移动三维形态测量技术进行了研究,开发了一种机器人搭载用的高集成度实时测量三维系统,利用机器人实时反馈的运动信息补偿同步误差,实验结果表明该方法能够克服基于质心跟踪方法中的估计盲区问题,进一步扩大了
三维形态测量范围。 论文在运动物体高速三维形态测量、同步误差补偿算法、异构并行运算以
及移动三维形态测量方面取得了一定的研究成果。研究成果扩展了格雷码编码结构光三维形态测量适用范围。
关键词:结构光投影,格雷码编码,运动补偿算法,高速视觉,GPU并行计算,
二、关键技术参数:
1.检测范围;2.检测精度;3.检测角度;4.帧率;5.模块大小;6.功耗
目前的主流摄像头在检测范围、检测精度和检测角度等都相差不大,主要区别在于:
1、结构光方案优势在于技术成熟,深度图像分辨率可以做得比较高,但容易受光照影响,室外环境基本不能使用;
2、TOF方案抗干扰性能好,视角更宽,不足是深度图像分辨率较低,做一些简单避障和视觉导航可以用,不适合高精度场合。受环境影响小,传感器芯片并不成熟,成本很高,实现量产困难。
3、双目方案,成本相对前面两种方案最低,但是深度信息依赖纯软件算法得出,此算法复杂度高,难度很大,处理芯片需要很高的计算性能,同时它也继承了普通RGB摄像头的缺点:在昏暗环境下以及特征不明显的情况下并不适用。
三种方案对比:
三、总结:
1.双目方案:最大的问题在于实现算法需要很高的计算资源,导致实时性很差,而且基本跟分辨率,检测精度挂钩。也就是说,分辨率越高,要求精度越高,则计算越复杂,同时,纯双目方案受光照,物体纹理性质影响。
2.结构光方案:目的就是为了解决双目中匹配算法的复杂度和鲁棒性问题而提出,该方案解决了大多数环境下双目的上述问题。但是,在强光下,结构光核心技术激光散斑会被淹没。因此,不合适室外。同时,在长时间监控方面,激光发射设备容易坏,重新换设备后,需要重新标定。
3.TOF方案:传感器技术不是很成熟,因此,分辨率较低,成本高,但由于其原理与另外两种完全不同,实时性高,不需要额外增加计算资源,几乎无算法开发工作量,是未来。