源代码
#include
#include
#include
#include
using namespace std;
using namespace cv;
using namespace dnn;
int main()
{
String modelConfiguration = "/home/oliver/darknet-master/cfg/yolov2.cfg";
String modelBinary = "/home/oliver/darknet-master/yolov2.weights";
dnn::Net net = readNetFromDarknet(modelConfiguration, modelBinary);
if (net.empty())
{
printf("Could not load net...\n");
return 0;
}
vector classNamesVec;
ifstream classNamesFile("/home/oliver/darknet-master/data/coco.names");
if (classNamesFile.is_open())
{
string className = "";
while (std::getline(classNamesFile, className))
classNamesVec.push_back(className);
}
// 加载图像
VideoCapture capture(2);// VideoCapture:OENCV中新增的类,捕获视频并显示出来
while (1)
{
Mat frame;
capture >> frame;
Mat inputBlob = blobFromImage(frame, 1 / 255.F, Size(608, 608), Scalar(), true, false);
net.setInput(inputBlob, "data");
// 检测
Mat detectionMat = net.forward("detection_out");
vector layersTimings;
double freq = getTickFrequency() / 1000;
double time = net.getPerfProfile(layersTimings) / freq;
ostringstream ss;
ss << "detection time: " << time << " ms";
putText(frame, ss.str(), Point(20, 20), 0, 0.5, Scalar(0, 0, 255));
// 输出结果
for (int i = 0; i < detectionMat.rows; i++)
{
const int probability_index = 5;
const int probability_size = detectionMat.cols - probability_index;
float *prob_array_ptr = &detectionMat.at(i, probability_index);
size_t objectClass = max_element(prob_array_ptr, prob_array_ptr + probability_size) - prob_array_ptr;
float confidence = detectionMat.at(i, (int)objectClass + probability_index);
if (confidence > 0.5)
{
float x = detectionMat.at(i, 0);
float y = detectionMat.at(i, 1);
float width = detectionMat.at(i, 2);
float height = detectionMat.at(i, 3);
int xLeftBottom = static_cast((x - width / 2) * frame.cols);
int yLeftBottom = static_cast((y - height / 2) * frame.rows);
int xRightTop = static_cast((x + width / 2) * frame.cols);
int yRightTop = static_cast((y + height / 2) * frame.rows);
Rect object(xLeftBottom, yLeftBottom,
xRightTop - xLeftBottom,
yRightTop - yLeftBottom);
rectangle(frame, object, Scalar(0, 0, 255), 2, 8);
if (objectClass < classNamesVec.size())
{
ss.str("");
ss << confidence;
String conf(ss.str());
String label = String(classNamesVec[objectClass]) + ": " + conf;
int baseLine = 0;
Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
rectangle(frame, Rect(Point(xLeftBottom, yLeftBottom),
Size(labelSize.width, labelSize.height + baseLine)),
Scalar(255, 255, 255), CV_FILLED);
putText(frame, label, Point(xLeftBottom, yLeftBottom + labelSize.height),
FONT_HERSHEY_SIMPLEX, 0.5, Scalar(0, 0, 0));
}
}
}
cv::namedWindow("YOLO-Detections",0);
cv::imshow("YOLO-Detections", frame);
waitKey(30);
}
return 0;
}
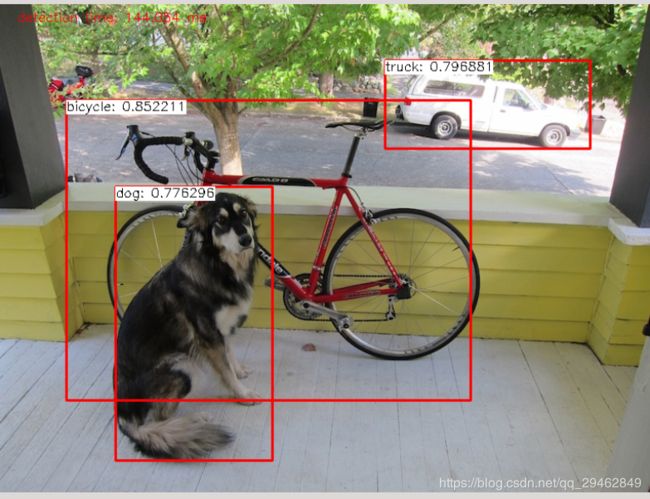
实验结果