数据结构——图知识总结
一、图的逻辑结构
1、图的定义
图是由顶点的有穷非空集合和顶点之间边的集合组成,通常表示为:
G=(V,E)
其中:G表示一个图,V是图G中顶点的集合,E是图G中顶点之间边的集合。
在线性表中,元素个数可以为零,称为空表;
在树中,结点个数可以为零,称为空树;
在图中,顶点个数不能为零,但可以没有边。
2、不同结构中逻辑关系的对比

在线性结构中,数据元素之间仅具有线性关系;
在树结构中,结点之间具有层次关系;
在图结构中,任意两个顶点之间都可能有关系。
二、图的基本术语
简单图:在图中,若不存在顶点到其自身的边,且同一条边不重复出现。
邻接、依附:
无向图中,对于任意两个顶点vi和顶点vj,若存在边(vi,vj),则称顶点vi和顶点vj互为邻接点,同时称边(vi,vj)依附于顶点vi和顶点vj。
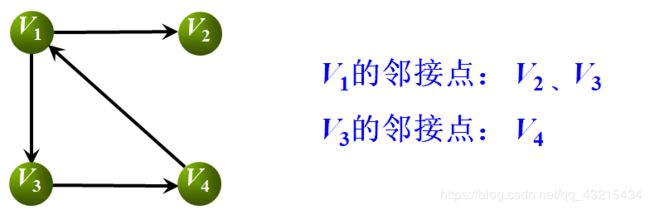
有向图中,对于任意两个顶点vi和顶点vj,若存在弧<vi,vj>,则称顶点vi邻接到顶点vj,顶点vj邻接自顶点vi,同时称弧<vi,vj>依附于顶点vi和顶点vj 。
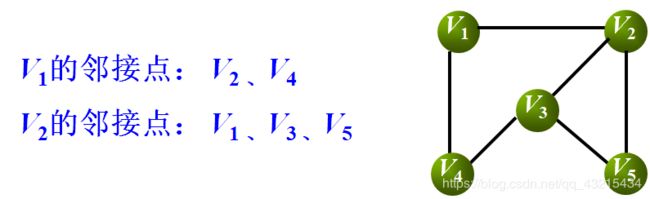
无向完全图:在无向图中,如果任意两个顶点之间都存在边,则称该图为无向完全图。
有向完全图:在有向图中,如果任意两个顶点之间都存在方向相反的两条弧,则称该图为有向完全图。
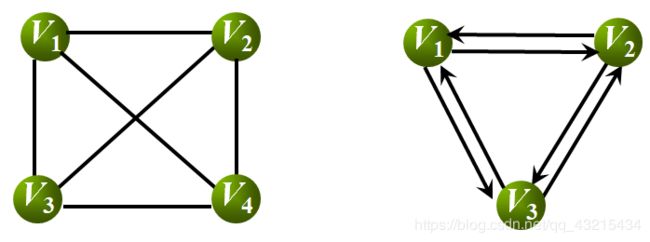
含有n个顶点的无向完全图有n×(n-1)/2条边。
含有n个顶点的有向完全图有n×(n-1)条边。
稀疏图:称边数很少的图为稀疏图;
稠密图:称边数很多的图为稠密图。
顶点的度:在无向图中,顶点v的度是指依附于该顶点的边数,通常记为TD (v)。
顶点的入度:在有向图中,顶点v的入度是指以该顶点为弧头的弧的数目,记为ID (v);
顶点的出度:在有向图中,顶点v的出度是指以该顶点为弧尾的弧的数目,记为OD (v)。
具有n个顶点、e条边的无向图G中,各顶点的度之和与边数之和的关系?

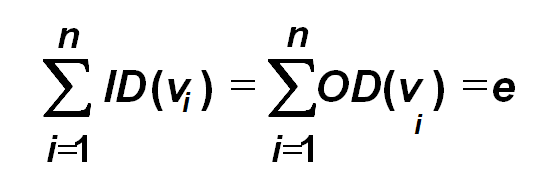
在具有n个顶点、e条边的有向图G中,各顶点的入度之和与各顶点的出度之和的关系?与边数之和的关系?
权:是指对边赋予的有意义的数值量。
网:边上带权的图,也称网图。
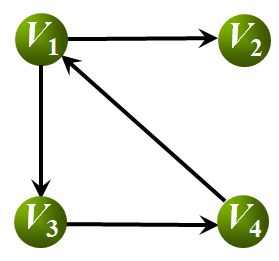
路径:在无向图G=(V, E)中,从顶点vp到顶点vq之间的路径是一个顶点序列(vp=vi0,vi1,vi2, …, vim=vq),其中,(vij-1,vij)∈E(1≤j≤m)。若G是有向图,则路径也是有方向的,顶点序列满足<vij-1,vij>∈E。
V1 到V4的路径: V1 V4
V1 V2 V3 V4
V1 V2 V5V3 V4

一般情况下,图中的路径不惟一。

V1 V4:长度为8
V1 V2 V3 V4 :长度为7
V1 V2 V5V3 V4 :长度为15
回路(环):第一个顶点和最后一个顶点相同的路径。
简单路径:序列中顶点不重复出现的路径。
简单回路(简单环):除了第一个顶点和最后一个顶点外,其余顶点不重复出现的回路。

子图:若图G=(V,E),G'=(V',E'),如果V'ÍV 且E' Í E ,则称图G'是G的子图。
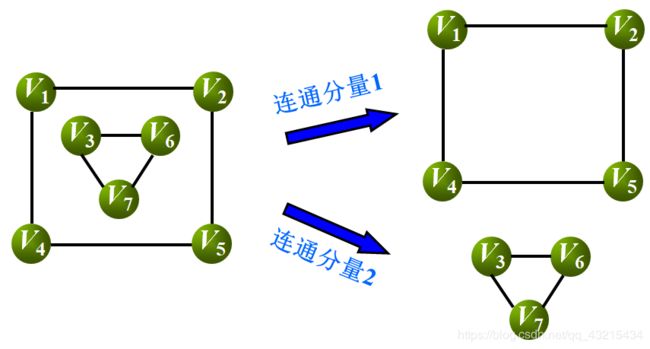
连通图:在无向图中,如果从一个顶点vi到另一个顶点vj(i≠j)有路径,则称顶点vi和vj是连通的。如果图中任意两个顶点都是连通的,则称该图是连通图。
连通分量:非连通图的极大连通子图称为连通分量。
极大连通子图:含有极大顶点数;依附于这些顶点的所有边。
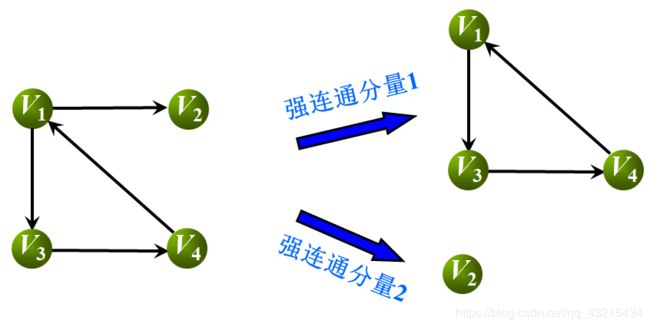
强连通图:在有向图中,对图中任意一对顶点vi和vj (i≠j),若从顶点vi到顶点vj和从顶点vj到顶点vi均有路径,则称该有向图是强连通图。
强连通分量:非强连通图的极大强连通子图。
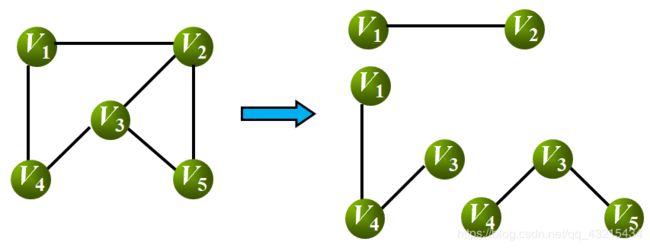
生成树:n个顶点的连通图G的生成树是包含G中全部顶点的一个极小连通子图。
极小连通子图:有n-1条边,多——构成回路,少——不连通。
生成森林:在非连通图中,由每个连通分量都可以得到一棵生成树,这些连通分量的生成树就组成了一个非连通图的生成森林。

三、图的抽象数据类型定义
ADT Graph
Data
顶点的有穷非空集合和边的集合
Operation
InitGraph
前置条件:图不存在
输入:无
功能:图的初始化
输出:无
后置条件:构造一个空的图
DFSTraverse
前置条件:图已存在
输入:遍历的起始顶点v
功能:从顶点v出发深度优先遍历图
输出:图中顶点的一个线性排列
后置条件:图保持不变
BFSTraverse
前置条件:图已存在
输入:遍历的起始顶点v
功能:从顶点v出发广度优先遍历图
输出:图中顶点的一个线性排列
后置条件:图保持不变
DestroyGraph
前置条件:图已存在
输入:无
功能:销毁图
输出:无
后置条件:释放图所占用的存储空间
GetVex
前置条件:图已存在
输入:顶点v
功能:在图中查找顶点v的数据信息
输出:顶点v的数据信息
后置条件:图保持不变
endADT
三、图的遍历操作
从图中某一顶点出发,对图中所有顶点访问一次且仅访问一次。
①选取遍历的起始顶点:从编号小的顶点开始 。
为了定义操作的方便,将图中的顶点按任意顺序排列起来,比如,按顶点的存储顺序。
②从某个起点始可能到达不了所有其它顶点:多次调用从某顶点出发遍历图的算法。
③因图中可能存在回路,某些顶点可能会被重复访问,那么如何避免遍历不会因回路而陷入死循环?
解决方案:附设访问标志数组visited[n] 。
④在图中,一个顶点可以和其它多个顶点相连,当这样的顶点访问过后,如何选取下一个要访问的顶点?
解决方案:深度优先遍历和广度优先遍历。
1、深度优先遍历
基本思想 :
⑴ 访问顶点v;
⑵ 从v的未被访问的邻接点中选取一个顶点w,从w出发进行深度优先遍历;
⑶ 重复上述两步,直至图中所有和v有路径相通的顶点都被访问到。
回溯方法
2、广度优先遍历
基本思想:
⑴ 访问顶点v;
⑵ 依次访问v的各个未被访问的邻接点v1, v2, …, vk;
⑶ 分别从v1,v2,…,vk出发依次访问它们未被访问的邻接点,并使“先被访问顶点的邻接点”先于“后被访问顶点的邻接点”被访问。直至图中所有与顶点v有路径相通的顶点都被访问到。
四、图的存储结构及实现
邻接矩阵
有向图和无向图
邻接表
有向图(出边表)和无向图
逆邻接表(有向图的入边表)
有向图,方便计算顶点的入度
有向图的十字链表
无向图的邻接多重表
边集数组
邻接矩阵(数组表示法)
基本思想:
用一个一维数组存储图中顶点的信息
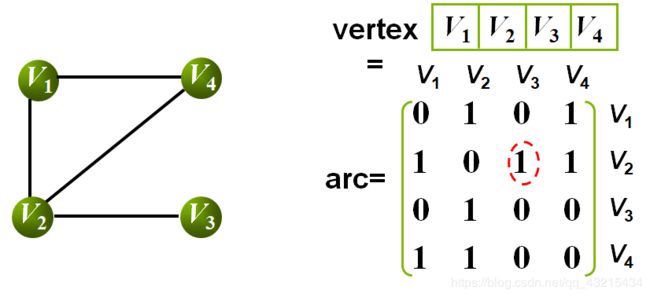
用一个二维数组(称为邻接矩阵)存储图中各顶点之间的邻接关系。
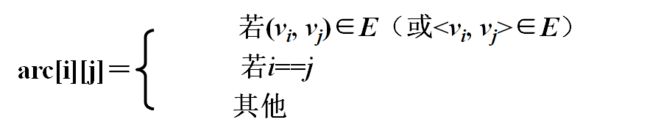
假设图G=(V,E)有n个顶点,则邻接矩阵是一个n×n的方阵,定义为:
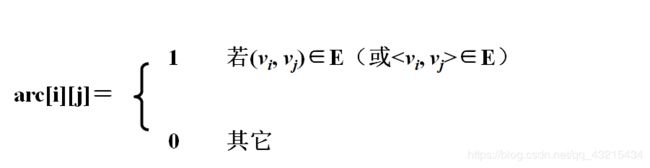
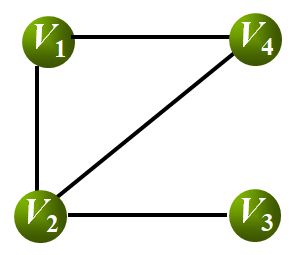
1、向图的邻接矩阵:主对角线为 0 且一定是对称矩阵。
①如何判断顶点 i 和 j 之间是否存在边?
测试邻接矩阵中相应位置的元素arc[i][j]是否为1。
②如何求顶点 i 的所有邻接点?
将数组中第 i 行元素扫描一遍,若arc[i][j]为1,则顶点 j 为顶点 i 的邻接点。
2、有向图的邻接:
①有向图的邻接矩阵一定不对称吗?
不一定,例如有向完全图。
②如何求顶点 i 的入度?
邻接矩阵的第 i 列元素之和。
③如何判断从顶点 i 到顶点 j 是否存在边?
测试邻接矩阵中相应位置的元素arc[i][j]是否为1。
3、网图的邻接矩阵
网图的邻接矩阵可定义为:
五、图的存储结构及实现
矩阵:
1、类
const int MaxSize=10;
template
class Mgraph{
public:
MGraph(T a[ ], int n, int e );
~MGraph( )
void DFSTraverse(int v);
void BFSTraverse(int v);
……
private:
T vertex[MaxSize];
int arc[MaxSize][MaxSize];
int vertexNum, arcNum;
};
2、构造函数
template
MGraph::MGraph(T a[ ], int n, int e) {
vertexNum=n; arcNum=e;
for (i=0; i
vertex[i]=a[i];
for (i=0; i
for (j=0; j
arc[i][j]=0;
for (k=0; k
cin>>i>>j; //边依附的两个顶点的序号
arc[i][j]=1; arc[j][i]=1; //置有边标志
}
}
3、深度优先遍历:
int visited[MaxSize];
template
void MGraph::DFSTraverse(int v){
cout<
for (j=0; j
if (arc[v][j]==1 && visited[j]==0)
DFSTraverse( j );
}
4、广度优先遍历
int visited[MaxSize];
template
void MGraph::BFSTraverse(int v){
front=rear=-1; //假设采用顺序队列且不会发生溢出
int Q[MaxSize]; cout<
while (front!=rear) {
v=Q[++front];
for (j=0; j
if (arc[v][j]==1 && visited[j]==0 ) {
cout<
}
}
}
5、增加一个顶点
template
void MGraph
if ( num<0|| num>vertexNum) throw "位置";
int row, col, numv;
numv = vertexNum-1;
vertexNum++;
for(int i=numv;i>=num;i--) vertex[i++]=vertex[i];
vertex[num]=name;
for(row=numv;row>=0;row--) {所有行上num列之后的列后移,增加一列,
for(col=numv;col>=num;col--) arc[row][col+1]=arc[row][col];
arc[row][num]=0;
}
for(row=numv;row>=num;row--)
for(col=0;col<=numv+1;col++) arc[row+1][col]=arc[row][col];
for(col=0;col
}
6、删除一个顶点
template
if ( pos<0|| pos>MaxSize) throw "位置";
int row, col;
int numv=vertexNum;
for(int i=pos;i
vertexNum--;
for(row=0;row
for(col=pos;col
}
for(row=pos;row
for(col=0;col
arc[row][col]=arc[row+1][col];
}
}
7、插入一条边
tmplate
void MGraph
{
if ( i>MaxSize|| j>MaxSize) throw "位置";
arc[i][j]=1;
arc[j][i]=1;
}
8、删除一条边
template
void MGraph
{
if ( i>MaxSize|| j>MaxSize) throw "位置";
arc[i][j]=arc[j][i]=0;
}
邻接表
邻接表存储的基本思想:
对于图的每个顶点vi,将所有邻接于vi的顶点链成一个单链表,称为顶点vi的边表(对于有向图则称为出边表)
所有边表的头指针和存储顶点信息的一维数组构成了顶点表。
邻接表有两种结点结构:顶点表结点和边表结点。

vertex:数据域,存放顶点信息。
firstedge:指针域,指向边表中第一个结点。
adjvex:邻接点域,边的终点在顶点表中的下标。
next:指针域,指向边表中的下一个结点。
1、定义邻接表的结点 :
struct ArcNode{
int adjvex;
ArcNode *next;
};
template
struct VertexNode{
T vertex;
ArcNode *firstedge;
};
2、无向图的邻接表:
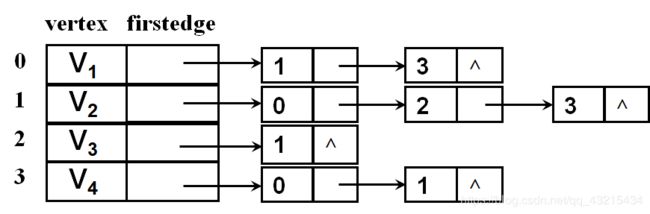
边表中的结点表示每个结点对应图中的一条边,邻接表的空间复杂度为O(n+e)。
顶点 i 的度:顶点i的边表中结点的个数。
判断顶点 i 和顶点 j之间是否存在边:测试顶点 i 的边表中是否存在终点为 j 的结点。
3、有向图的邻接表:
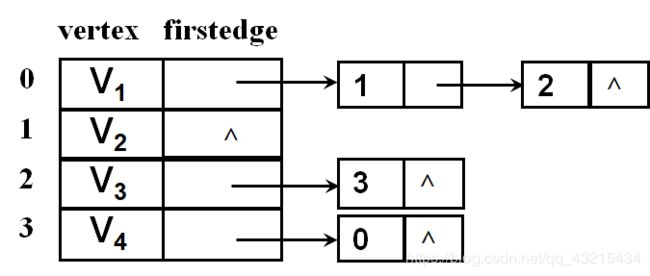
求顶点 i 的出度:顶点 i 的出边表中结点的个数。
求顶点 i 的入度:各顶点的出边表中以顶点 i 为终点的结点个数。
求顶点 i 的所有邻接点:遍历顶点 i 的边表,该边表中的所有终点都是顶点 i 的邻接点。
4、有向图类
const int MaxSize=10; //图的最大顶点数
template
class ALGraph
{
public:
ALGraph(T a[ ], int n, int e);
~ALGraph;
void DFSTraverse(int v);
void BFSTraverse(int v);
………
private:
VertexNode adjlist[MaxSize];
int vertexNum, arcNum;
};
构造函数
template
ALGraph::ALGraph(T a[ ], int n, int e)
{
vertexNum=n; arcNum=e;
for (i=0; i
{
adjlist[i].vertex=a[i];
adjlist[i].firstedge=NULL;
}
for (k=0; k
{
cin>>i>>j;
s=new ArcNode; s->adjvex=j;
s->next=adjlist[i].firstedge;
adjlist[i].firstedge=s;
}
}
深度优先遍历:
template
void ALGraph::DFSTraverse(int v){
cout<
p=adjlist[v].firstedge;
while (p!=NULL) {
j=p->adjvex;
if (visited[j]==0) DFSTraverse(j);
p=p->next;
}
}
广度优先遍历:
template
void ALGraph::BFSTraverse(int v){
front=rear=-1;
cout<
while (front!=rear) {
v=Q[++front]; p=adjlist[v].firstedge;
while (p!=NULL) {
j= p->adjvex;
if (visited[j]==0) {
cout<
}
p=p->next;
}
}
}
十字链表:有向图的链式存储结构

vertex:数据域,存放顶点信息;
firstin:入边表头指针;
firstout:出边表头指针;
tailvex:弧的起点在顶点表中的下标;
headvex:弧的终点在顶点表中的下标;
headlink:入边表指针域;
taillink:出边表指针域。
邻接多重表 :无向图的存储结构
边集数组
利用两个一维数组
数组分量包含三个域:边所依附的两个顶点,权值
Struct edge
{
int i;
int j;
int weight;
}
将邻接矩阵转化成边集数组:
edge edges[M];//边的数据结构类型的变量
for ( i = 0; i < G->vexnum; i++) {
for (j = 0; j <= G->vexnum; j++) {
if (G->arc[i][j] == 1) {
edges[k].begin = i;
edges[k].end = j;
// edges[k].weight = G->arc[i][j];
k++;
}
}
}
六、普里姆(Prim)算法
基本思想:
设G=(V, E)是具有n个顶点的连通网,
T=(U, TE)是G的最小生成树,
T的初始状态为U={u0}(u0∈V),TE={ },
重复执行下述操作:
在所有u∈U,v∈V-U的边中找一条代价最小的边(u, v)并入集合TE,同时v并入U,直至U=V。
Void prime(MGraph G){
for(int i=1;i
lowcost[i]=G.arc[0][i]; adjvex[i]=0;
}
lowcost[0]=0;
for(i=1;i
k=MinEdge(lowcost,G.vertexNum)
cout<
lowcost[k]=0;
for(j=1;j
if((G.arc[k][j]
lowcost[j]=G.arc[k][j];
arcvex[j]=k;
}
}
}
克鲁斯卡尔(Kruskal)算法
基本思想:
. 初始化:U=V; TE={ };
2. 循环直到T中的连通分量个数为1
2.1 在E中寻找最短边(u,v);
2.2 如果顶点u、v位于T的两个不同连通分量,则
2.2.1 将边(u,v)并入TE;
2.2.2 将这两个连通分量合并为一个;
2.3 在E中标记边(u,v),使得(u,v)不参加后续最短边的选取;
Kruskal算法实现中的三个关键问题:
采用边集数组存储图。
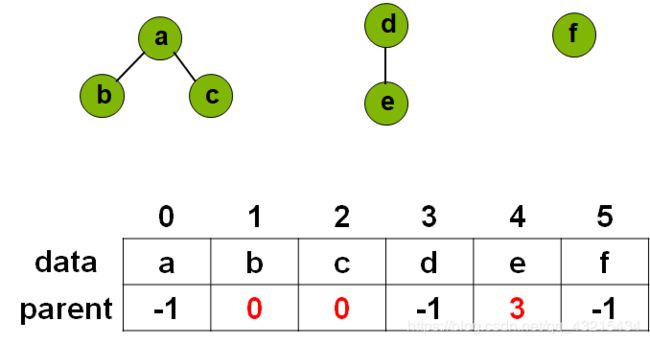
定义Parent[i]数组。数组分量的值表示顶点i的双亲节点(初值为-1;)
当一条边(u,v)的两个顶点的根结不同时,这两个结点属于不同的连通分量(利用parent 数组查找一棵树的根节点。当一个结点n的parent==-1,树的根节点即为n)
3、如何将一条边所依附的两个顶点合并到同一个连通分量中
要进行联通分量的合并 ,其中一个顶点所在的树的根节点为vex1,另一个顶点所在的树的根节点为vex2,则:parent[vex2]=vex1;
并查集的存储结构:
用树结构(双亲表示法)实现并查集。
int main(){
int arcNum, int vertexNum;
EdgeNode *edge;
int *parent;
cout<<"please input the number of vertexNum:"; cin>>vertexNum;
cout<<"please input the number of edges:"; cin>>arcNum;
edge=new EdgeNode[arcNum]; parent=new int[vertexNum];
for(int i=0;i
cout<<"Please input the edges:";
cin>>edge[i].from>>edge[i].to>>edge[i].weight;
}
sort(edges, G); //对边集数组进行堆排序,时间复杂性为O(eloge)
for (i=0;i
parent[i]=-1; //每个节点分属于不同的集合
int k=0,begin,end,count=0;
cout<<"next is the MST :"<
for (k=0;k
begin=edge[k].from; end=edge[k].to;
int m,n;
m=Find(parent,begin); n=Find(parent,end);
if(m!=n) {
cout<
parent[n]=m;
count++;
if(count==vertexNum-1) break;
}
}
return 0;
}
int Find(int *parent, int node)
{
int f;
f=node;
while(parent[f]>-1)
f=parent[f];
return f;
}
最短路径:在非网图中,最短路径是指两顶点之间经历的边数最少的路径。
在网图中,最短路径是指两顶点之间经历的边上权值之和最短的路径。
Dijkstra算法:
基本思想:
重复上述过程,直到集合V中全部顶点加入到集合S中。
Floyd算法:
基本思想:
设图g用邻接矩阵法表示,
求图g中任意一对顶点vi、 vj间的最短路径。
(-1) 将vi到vj 的最短的路径长度初始化为(vi,vj), 然后进行如下n次比较和修正:
(0) 在vi、vj间加入顶点v0,比较(vi, v0, vj)和(vi, vj)的路径的长度,取其中较短的路径作为vi到vj的且中间顶点号不大于0的最短路径。
(1) 在vi、vj间加入顶点v1,
得(vi, …,v1)和(v1, …,vj),其中:
(vi, …, v1)是vi到v1 的且中间顶点号不大于0的最短路径,
(v1, …, vj) 是v1到vj 的且中间顶点号不大于0的最短路径,
这两条路径在上一步中已求出。
将(vi, …, v1, …, vj)与上一步已求出的且vi到vj 中间顶点号不大于0的最短路径比较,取其中较短的路径作为vi到vj 的且中间顶点号不大于1的最短路径。
(2)在vi、vj间加入顶点v2,得
(vi, …, v2)和(v2, …, vj), 其中:
(vi, …, v2)是vi到v2 的且中间顶点号不大于1的最短路径,
(v2, …, vj) 是v2到vj 的且中间顶点号不大于1的最短路径,
这两条路径在上一步中已求出。
将(vi, …, v2, …, vj)与上一步已求出的且vi到vj 中间顶点号不大于1的最短路径比较, 取其中较短的路径作为vi到vj 的且中间顶点号不大于2的最短路径。
……
void Floyd(MGraph G)
{
for (i=0; i
for (j=0; j
{
dist[i][j]=G.arc[i][j];
if (dist[i][j]!=∞)
path[i][j]=G.vertex[i]+G.vertex[j];
else path[i][j]="";
}
for (k=0; k
for (i=0; i
for (j=0; j
if (dist[i][k]+dist[k][j]
dist[i][j]=dist[i][k]+dist[k][j];
path[i][j]=path[i][k]+path[k][j];
}
}
七、有向无环图及其应用
AOV网:
AOV网:在一个表示工程的有向图中,用顶点表示活动,用弧表示活动之间的优先关系,称这样的有向图为顶点表示活动的网,简称AOV网。
AOV网特点:
AOV网中的弧表示活动之间存在的某种制约关系。
AOV网中不能出现回路 。
拓扑排序:
拓扑序列:
设G=(V,E)是一个具有n个顶点的有向图,V中的顶点序列v1, v2, …, vn称为一个拓扑序列,当且仅当满足下列条件:若从顶点vi到vj有一 条路径,则在顶点的拓扑序列中顶点vi必在顶点vj之前。
拓扑排序:对一个有向图构造拓扑序列的过程称为拓扑排序 。
拓扑序列使得AOV网中所有应存在的前驱和后继关系都能得到满足。
基本思想:
⑴ 从AOV网中选择一个没有前驱的顶点并且输出;
⑵ 从AOV网中删去该顶点,并且删去所有以该顶点为尾的弧;
⑶ 重复上述两步,直到全部顶点都被输出,或AOV网中不存在没有前驱的顶点。
void TOpSort(){
int top=-1, count=0;
for(int i=0;i
if(adjlist[i].in==0) s[++top]=i;
while(top!=-1){
j=s[top--]; cout <
p=adjlist[j].firstedge;
while(p!=NULL){
k=p->adjvex; adjlist[k].in--;
if(adjlist[k].in==0) s[top++]=k;
p=p->next;
}
}
If (count
}
AOE网:
在一个表示工程的带权有向图中,
用顶点表示事件,
用有向边表示活动,
边上的权值表示活动的持续时间,
称这样的有向图叫做边表示活动的网,简称AOE网。
AOE网中没有入边的顶点称为始点(或源点),没有
AOE网的性质:
⑴ 只有在某顶点所代表的事件发生后,从该顶点出发的各活动才能开始;
⑵ 只有在进入某顶点的各活动都结束,该顶点所代表的事件才能发生。
出边的顶点称为终点(或汇点)。
八、图的连通性
无向图的连通性:
要想判定一个无向图是否为连通图,或有几个连通分量,通过对无向图遍历即可得到结果。
连通图:仅需从图中任一顶点出发,进行深度优先搜索(或广度优先搜索),便可访问到图中所有顶点。