【OpenCV学习笔记】之基于距离变换与分水岭图像分割算法
什么是图像分割?
- 图像分割(Image Segmentation)是图像处理最重要的处理手段之一。
- 图像分割的目标是将图像中像素根据一定的规则分为若干(N)个cluster集合,每个集合包含一类像素。
- 根据算法分为监督学习方法和无监督学习方法,图像分割的算法多数都是无监督学习方法 - KMeans
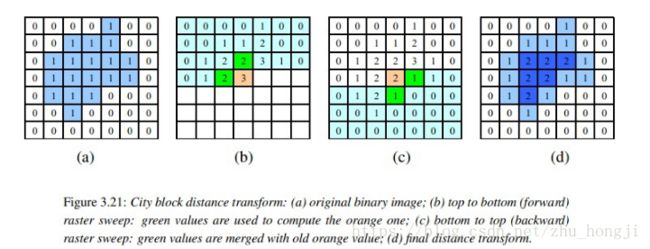
距离变换常见算法有两种:
距离变换的定义 :计算图像中像素点到最近零像素点的距离,也就是零像素点的最短距离。
距离变换的方法:首先对图像进行二值化处理,然后给每个像素赋值为离它最近的背景像素点与其距离(Manhattan距离or欧氏距离),得到distance metric(距离矩阵),那么离边界越远的点越亮。
距离变换常用应用:
- 细化轮廓;
- 寻找质心;
分水岭变换常见的算法 :
- 基于浸泡理论实现,假设图像每个位置的像素值为不同的地貌势必会形成山峰和山谷,在山底不停加水,直到各大山头之间形成了明显的分水线——分水岭算法的基本思想。
这个链接里面的分水岭算法的详细解释:https://blog.csdn.net/iracer/article/details/49225823
需要的一些OpenCV的API介绍:
C++: void distanceTransform(InputArray src, OutputArray dst, int distanceType, int maskSize,int labelType)
//InputArray src:输入的图像,一般为二值图像
// OutputArray dst:输出的图像
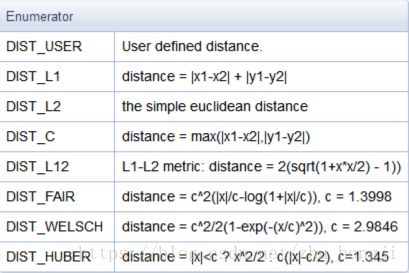
//int distanceType:所用的求解距离的类型、
//It can be CV_DIST_L1, CV_DIST_L2 , or CV_DIST_C
//mask_size 距离变换掩模的大小,可以是 3 或 5. 对 CV_DIST_L1 或 CV_DIST_C 的情况,参数值被强制设定为 3, 因为 3×3 mask 给出 5×5 mask 一样的结果,而且速度还更快。
//int labelType; oepncv2X里面不需要参数六参数四距离可选类型:
参数六标签可选类型:

C++ void watershed(InputArray image, InputOutputArray markers)
//参数一:输入图像,需为8位的三通道彩色图像;
//参数二:调用函数后的结果放在这里,输入\输出32位单通道图像的标记结果,即这个参数用于存放函数调用后的输出结果,需和源图像有一样的尺寸示例程序:
//基于距离变换和分水岭的图像分割(image segmentation)
//图像分割的目标是将图像中像素根据一定的规则分为若干(N)个cluster集合,每个集合包含一类像素。
//步骤:1.将白色背景变成黑色-目的是为后面的变换做准备
//2. 使用filter2D与拉普拉斯算子实现图像对比度提高,sharp
//3. 转为二值图像通过threshold
//4. 距离变换
//5. 对距离变换结果进行归一化到[0~1]之间
//6. 使用阈值,再次二值化,得到标记
//7. 腐蚀得到每个Peak - erode
//8.发现轮廓 – findContours
//9. 绘制轮廓 - drawContours
//10.分水岭变换 watershed
//11. 对每个分割区域着色输出结果
#include "stdafx.h"
#include
#include
#include
using namespace std;
using namespace cv;
int main(int argc, char*argv)
{
Mat src;
src = imread("C:/Users/59235/Desktop/imag/Pentagram.jpg");
if (!src.data)
{
printf("could not load image...\n");
return -1;
}
namedWindow("input", CV_WINDOW_AUTOSIZE);
imshow("input", src);
//将白色背景变成黑色-目的是为后面的变换做准备
for (int row = 0; row < src.rows; row++)
{
for (int col = 0; col(row, col)[0]>200 && src.at(row, col)[1]>200 && src.at(row, col)[2]>200)
{
src.at(row, col)[0] = 0;
src.at(row, col)[1] = 0;
src.at(row, col)[2] = 0;
}
}
}
const char*input = "change backgroud image";
namedWindow(input, CV_WINDOW_AUTOSIZE);
imshow(input, src);
//使用filter2D与拉普拉斯算子实现图像对比度提高,sharp
Mat imgLaplance;
Mat sharp = src;
Mat kernel = (Mat_(3, 3) << 1, 1, 1, 1, -8, 1, 1, 1, 1);
filter2D(sharp, imgLaplance, CV_32F, kernel, Point(-1, -1), 0, BORDER_DEFAULT);
src.convertTo(sharp, CV_32F);
Mat imgResult = sharp - imgLaplance;
//显示
imgResult.convertTo(imgResult, CV_8UC3);
imgLaplance.convertTo(imgLaplance, CV_8UC3);
namedWindow("Sharp image", CV_WINDOW_AUTOSIZE);
imshow("Sharp image", imgResult);
// src = resultImg; // copy back
//binary image转为二值图像通过threshold
Mat binaryImag;
cvtColor(src, binaryImag, CV_BGR2GRAY);
threshold(binaryImag, binaryImag, 40, 255, THRESH_OTSU | THRESH_BINARY);
namedWindow("binary image", CV_WINDOW_AUTOSIZE);
imshow("binary image", binaryImag);
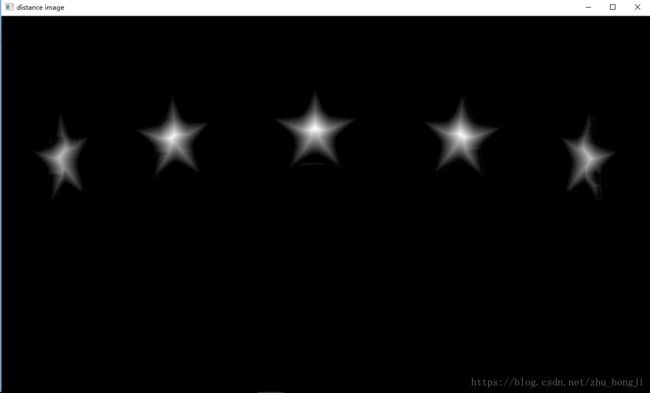
//距离变换(distance transform )
Mat distImg;
distanceTransform(binaryImag, distImg, DIST_L1, 3, 5);
//cv::distanceTransform(InputArray src, OutputArray dst, OutputArray labels, int distanceType, int maskSize, int labelType=DIST_LABEL_CCOMP)
//distanceType = DIST_L1 / DIST_L2,
//maskSize = 3x3, 最新的支持5x5,推荐3x3、
//labels离散维诺图输出
//dst输出8位或者32位的浮点数,单一通道,大小与输入图像一致
//对距离变换结果进行归一化到[0~1]之间
normalize(distImg, distImg, 0, 1, NORM_MINMAX);
imshow("distance image", distImg);
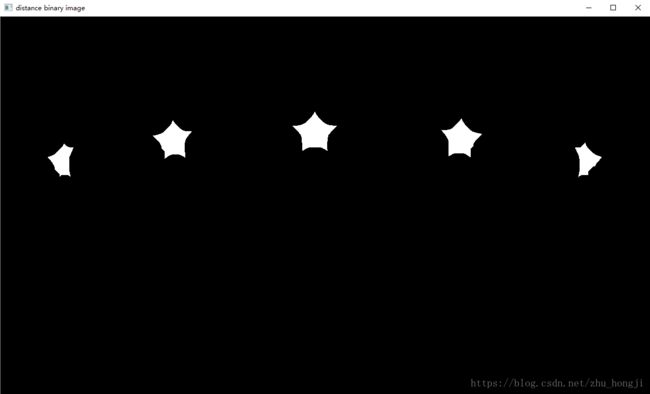
//使用阈值,再次二值化,得到标记(binary again)
threshold(distImg, distImg, .2, 1, THRESH_BINARY);
//腐蚀得到每个Peak - erode
Mat kernel1 = Mat::ones(13, 13, CV_8UC1);
erode(distImg, distImg, kernel1, Point(-1, -1));
imshow("distance binary image", distImg);
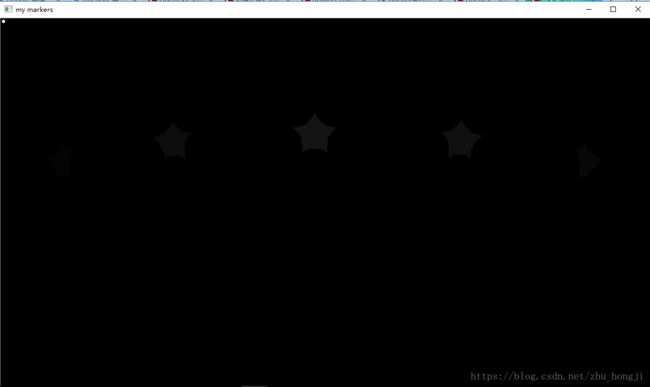
// markers (发现轮廓 – findContours)
Mat dist_8u;
distImg.convertTo(dist_8u, CV_8U);
vector> contours;
findContours(dist_8u, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point(0, 0));
// create makers(绘制轮廓 - drawContours)
Mat markers = Mat::zeros(src.size(), CV_32SC1);
for (size_t i = 0; i < contours.size(); i++) {
drawContours(markers, contours, static_cast(i), Scalar::all(static_cast(i) + 1), -1);
}
circle(markers, Point(5, 5), 3, Scalar(255, 255, 255), -1);
imshow("my markers", markers * 1000);
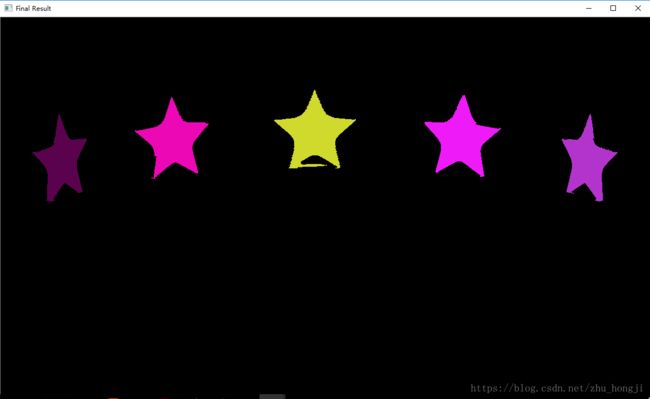
// perform watershed(基于浸泡理论实现 )
watershed(src, markers);
Mat mark = Mat::zeros(markers.size(), CV_8UC1);
markers.convertTo(mark, CV_8UC1);
//src.convertTo(dst, type, scale, shift)
//dst:目的矩阵;
//type:需要的输出矩阵类型,或者更明确的,是输出矩阵的深度,如果是负值(常用 - 1)则输出矩阵和输入矩阵类型相同;
//scale : 比例因子;
//shift:将输入数组元素按比例缩放后添加的值;
bitwise_not(mark, mark, Mat());
imshow("watershed image", mark);
// generate random color
vector colors;
for (size_t i = 0; i < contours.size(); i++) {
int r = theRNG().uniform(0, 255);
int g = theRNG().uniform(0, 255);
int b = theRNG().uniform(0, 255);
colors.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r));
}
// fill with color and display final result(对每个分割区域着色输出结果)
Mat dst = Mat::zeros(markers.size(), CV_8UC3);
for (int row = 0; row < markers.rows; row++) {
for (int col = 0; col < markers.cols; col++) {
int index = markers.at(row, col);
if (index > 0 && index <= static_cast(contours.size())) {
dst.at(row, col) = colors[index - 1];
}
else {
dst.at(row, col) = Vec3b(0, 0, 0);
}
}
}
imshow("Final Result", dst);
waitKey(0);
return 0;
} 效果图: