 外汇公司
外汇公司
高通 camera 调试
高通camera驱动分析
./qcom/proprietary/mm-still/codec_v1/omx/jpeg_encoder/Android.mk:15:CHROMATIX_VERSION := 0309
这个定义用那个版本,这个就是用0309的版本
在调试的时候发现不能点亮,发现是pdaf关掉就可以了。 is_pdaf_support =0;
在调试代码的时候发现, 内核部分只有配置电压和始终的代码,初始化部分都在 vendor下, 通过名字匹配。af也是一样。
sensor_init.c 里可以添加 支持的sensor类型,可以支持多颗sensor ,能够自动识。
OV8865
1、kernel部分:
A、kernel_driver:
把驱动文件ov8865_qtech_f8865ac.c 放到kernel/drivers/media/platform/msm/camera_v2/sensor/目录下
B、kernel_dtsi:
把如下板级信息加到kernel/arch/arm/boot/dts/msm8610-qrd-camera-sensor.dtsi文件中
actuator1: qcom,actuator@18 {
cell-index = <4>;
reg = <0x18>;
compatible = "qcom,actuator";
qcom,cci-master = <0>;
};
eeprom0:qom,eeprom@2b{
cell-index = <0>;
reg = <0x2b 0x0>;
...
...
};
qcom,camera@7f {
compatible = "qcom,ov8865_qtech";
reg = <0x7f>;
qcom,slave-id = <0x6c 0x300b 0x8865>;
qcom,csid-sd-index = <0>;
qcom,actuator-src = <&actuator1>;
qcom,eeprom-src = <&eeprom0>;
qcom,led-flash-src = <&led_flash0>;
qcom,mount-angle = <90>;
qcom,sensor-name = "ov8865_qtech";
cam_vdig-supply = <&pm8110_l7>;
cam_vana-supply = <&pm8110_l19>;
cam_vio-supply = <&pm8110_l14>;
qcom,cam-vreg-name = "cam_vdig", "cam_vio", "cam_vana";
qcom,cam-vreg-type = <0 0 0>;
qcom,cam-vreg-min-voltage = <1500000 1800000 2850000>;
qcom,cam-vreg-max-voltage = <1500000 1800000 2850000>;
qcom,cam-vreg-op-mode = <200000 200000 100000>;
qcom,gpio-no-mux = <0>;
gpios = <&msmgpio 13 0>,
<&msmgpio 21 0>,
<&msmgpio 20 0>,
<&pm8110_gpios 2 0>;
qcom,gpio-reset = <1>;
qcom,gpio-standby = <2>;
qcom,gpio-vdig = <3>;
qcom,gpio-req-tbl-num = <0 1 2 3>;
qcom,gpio-req-tbl-flags = <1 0 0 0>;
qcom,gpio-req-tbl-label = "CAMIF_MCLK",
"CAM_RESET1",
"CAM_STANDBY",
"CAM_VDIG";
qcom,csi-lane-assign = <0xe4>;
qcom,csi-lane-mask = <0x3>;
qcom,sensor-position = <0>;
qcom,sensor-mode = <1>;
qcom,cci-master = <0>;
};
C、kernel-clock:
这部分主要是针对 B 的,增加一些I2C地址
如下代码断:
--- a/arch/arm/mach-msm/clock-8610.c
+++ b/arch/arm/mach-msm/clock-8610.c
@@ -3033,6 +3033,7 @@ static struct clk_lookup msm_clocks_8610[] = {
CLK_LOOKUP("cam_src_clk", mclk0_clk_src.c, "6-0020"),
CLK_LOOKUP("cam_src_clk", mclk0_clk_src.c, "6-006a"),
CLK_LOOKUP("cam_src_clk", mclk1_clk_src.c, "6-0048"),
+ CLK_LOOKUP("cam_src_clk", mclk0_clk_src.c, "6-006c"), //front camera ismclk1_clk_src.c back camera ismclk0_clk_src.c
CLK_LOOKUP("cam_clk", mclk0_clk.c, "6-006f"),
CLK_LOOKUP("cam_clk", mclk0_clk.c, "6-0034"),
CLK_LOOKUP("cam_clk", mclk0_clk.c, "6-007d"),
@@ -3042,6 +3043,7 @@ static struct clk_lookup msm_clocks_8610[] = {
CLK_LOOKUP("cam_clk", mclk0_clk.c, "6-0020"),
CLK_LOOKUP("cam_clk", mclk0_clk.c, "6-006a"),
CLK_LOOKUP("cam_clk", mclk1_clk.c, "6-0048"),
+ CLK_LOOKUP("cam_clk", mclk0_clk.c, "6-006c"),
D、把C文件加到Makefile
--- a/drivers/media/platform/msm/camera_v2/sensor/Makefile
+++ b/drivers/media/platform/msm/camera_v2/sensor/Makefile
@@ -22,3 +22,4 @@ obj-y += gc2035.o
#obj-$(CONFIG_SP1628) += sp1628.o
obj-$(CONFIG_GC0339) += gc0339.o
obj-$(CONFIG_HM1090) += HM1090.o
+obj-y +=ov8865_qtech_f8865ac.o
kernel部分就这么多了,此时可以先编译一个bootimage看看能不能编译过。
2、vendor部分
这一部分主要包括:效果(chromatix)、马达AF驱动(actuators)、库文件(sensor_libs)
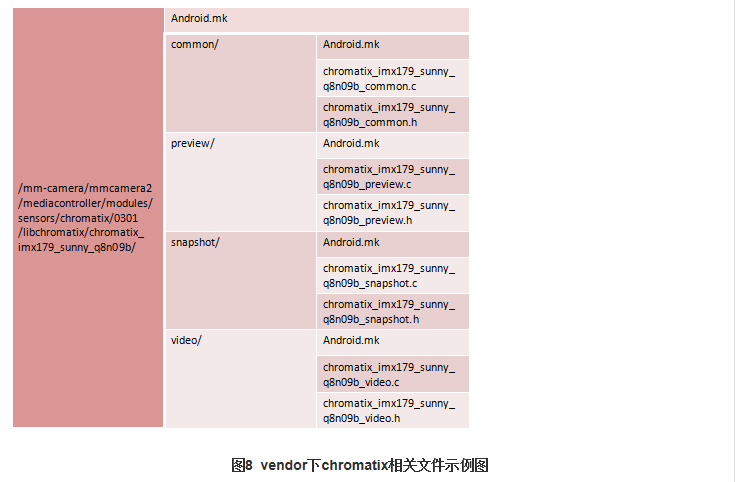
A、效果(chromatix):把chromatix_ov8865_qtech_f8865ac整个文件夹放到vendor/qcom/proprietary/mm-camera/mm-camera2/media-controller/modules/sensors/chromatix/0301/libchromatix/下
B、马达AF驱动(actuators) :把af_main_cam_camcorder_6.h、af_main_cam_camera_6.h AF头文件放到vendor/qcom/proprietary/mm-camera/mm-camera2/media-controller/modules/sensors/actuators/0301/目录下。
同时做如下工作:
--- a/mm-camera/mm-camera2/media-controller/modules/sensors/actuators/actuator.c
+++ b/mm-camera/mm-camera2/media-controller/modules/sensors/actuators/actuator.c
@@ -13,7 +14,7 @@
-static actuator_ctrl_t actuators[ACTUATOR_CAM_MODE_MAX][6] = {
+static actuator_ctrl_t actuators[ACTUATOR_CAM_MODE_MAX][7] = {
@@ -21,6 +22,7 @@ static actuator_ctrl_t actuators[ACTUATOR_CAM_MODE_MAX][6] = {
#include "af_main_cam_camera_2.h"
#include "af_main_cam_camera_3.h"
#include "af_main_cam_camera_4.h"
#include "af_main_cam_camera_5.h"
+ #include "af_main_cam_camera_6.h"
@@ -29,6 +31,7 @@ static actuator_ctrl_t actuators[ACTUATOR_CAM_MODE_MAX][6] = {
#include "af_main_cam_camcorder_2.h"
#include "af_main_cam_camcorder_3.h"
#include "af_main_cam_camcorder_4.h"
#include "af_main_cam_camcorder_5.h"
+ #include "af_main_cam_camcorder_6.h"
}
};
在af_main_cam_camcorder_6.h中会有af_header_info_t:
如下:
/* af_header_info_t */
{
/* header_version */
0x301,
/* cam_name */
ACTUATOR_MAIN_CAM_6,
/* module_name */
"ov8865",
/* actuator_name */
"BU64243GWZ",
}, /* af_header_info_t */
其中ACTUATOR_MAIN_CAM_6这个需要在kernel中定义,在kernel/include/media/msm_cam_sensor.h文件中添加ACTUATOR_MAIN_CAM_6
enum af_camera_name {
ACTUATOR_MAIN_CAM_0,
ACTUATOR_MAIN_CAM_1,
ACTUATOR_MAIN_CAM_2,
ACTUATOR_MAIN_CAM_3,
ACTUATOR_MAIN_CAM_4,
ACTUATOR_MAIN_CAM_5,
ACTUATOR_MAIN_CAM_6
ACTUATOR_WEB_CAM_0,
ACTUATOR_WEB_CAM_1,
ACTUATOR_WEB_CAM_2,
};
C、库文件(sensor_libs) :把ov8865_qtech_f8865ac整个文件夹放到vendor/qcom/proprietary/mm-camera/mm-camera2/media-controller/modules/sensors/sensor_libs/目录下
D、把相关文件添加到config中,如下:
--- a/common/config/device-vendor.mk
+++ b/common/config/device-vendor.mk
@@ -526,6 +526,7 @@ MM_CAMERA += libmmcamera_s5k3l1yx
+MM_CAMERA += libmmcamera_ov8865_qtech //库文件
MM_CAMERA += libmmcamera_SKUAA_ST_gc0339
@@ -617,6 +618,10 @@ MM_CAMERA += libchromatix_ov8825_7853f_snapshot
MM_CAMERA += libchromatix_ov8825_7853f_zsl
+MM_CAMERA += libchromatix_ov8865_qtech_f8865ac_snapshot //效果文件
+MM_CAMERA += libchromatix_ov8865_qtech_f8865ac_preview
+MM_CAMERA += libchromatix_ov8865_qtech_f8865ac_common
+MM_CAMERA += libchromatix_ov8865_qtech_f8865ac_default_video
MM_CAMERA += libchromatix_SKUAA_ST_gc0339_common
@@ -640,6 +645,7 @@ MM_CAMERA += libchromatix_skuf_ov5648_p5v23c_preview
MM_CAMERA += libmmcamera_truly_cm7700_eeprom
+MM_CAMERA += libmmcamera_qtech_f8865ac_eeprom //e2prom文件
MM_CAMERA += libmmcamera_sunny_p12v01m_eeprom
编systemimage.img验证
1camera基本代码架构
高通平台对于camera的代码组织,大体上还是遵循Android的框架:即上层应用和HAL层交互,高通平台在HAL层里面实现自己的一套管理策略;在kernel中实现sensor的底层驱动。但是,对于最核心的sensor端的底层设置、ISP效果相关等代码则是单独进行了抽离,放在了一个daemon进程中进行管理:
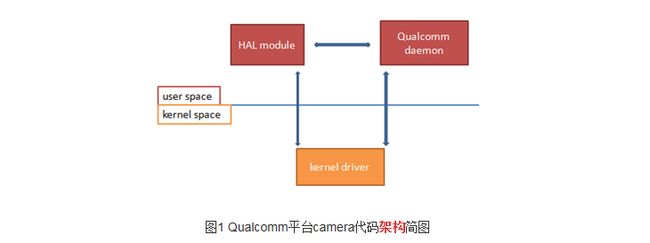
由于高通把大部分具体的设置及参数放到了daemon进程中,所以在kernel部分只是进行了V4L2的设备注册、IIC设备注册等简单的动作:
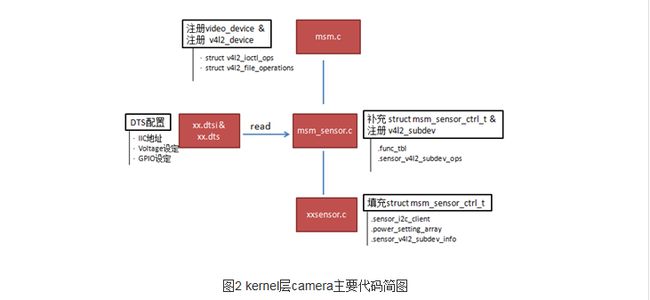
如上图,camera在kernel层的主文件为msm.c,负责设备的具体注册及相关方法的填充;在msm_sensor.c文件中,主要维护高通自己的一个sensor相关结构体—msm_sensor_ctrl_t,同时把dts文件中的配置信息读取出来;kernel层对于不同的sensor对应自己的一个驱动文件—xxsensor.c,主要是把powersetting的设定填充到msm_sensor_ctrl_t中。
在vendor目录下,高通把各个sensor实质性的代码放置在此。一部分代码是高通自己实现的daemon进程和kernel层及HAL层进行通讯的框架代码;另一部分则是和sensor相关的chromatix效果代码和sensorlib部分代码(initsetting、lensinfo、outputinfo)。
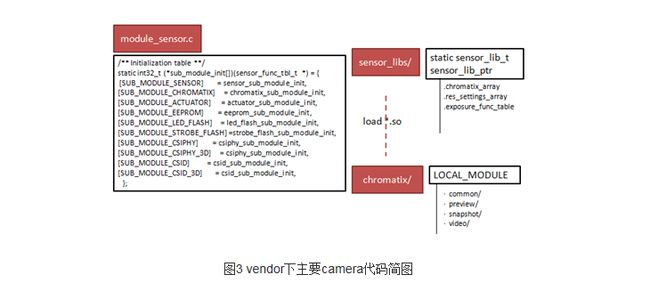
如上图,高通平台通过一个函数指针数组sub_module_init来管理sensor相关的组件;其中重要的是sensor_sub_module_init和chromatix_sub_module_init模块,对于sensor模块需要对应填充sensor_lib_t下的接口,对于chromatix模块则是通过高通的chromatix工具生成。
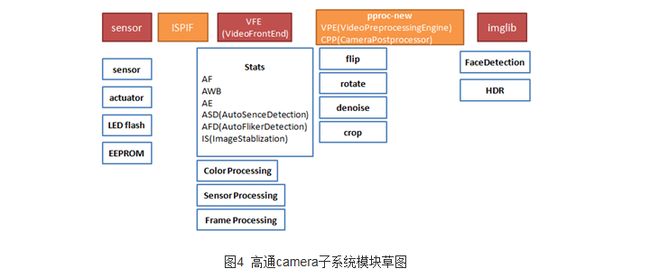
从更高的层次来看,sensor部分的代码只是camera子系统的一部分。打开高通vendor下面关于camera的源码也可以看到,/mm-camera2/media-controller/modules目录下面,sensors只是modules文件下面其中的一个子目录。
2主要移植步骤
2.1kernel层代码移植
对于kernel层的代码移植,实际上对dts文件的移植。因为kernel层驱动代码基本已经被高通的框架以及vendor下代码架空,只剩下一个上电的列表。具体步骤为:
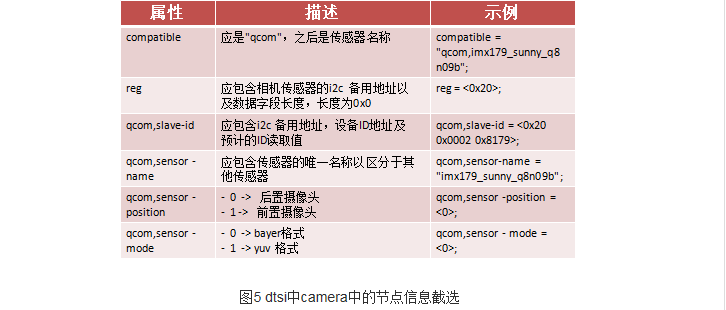
1.在目录kernel/arch/arm/boot/dts/下的对应dtsi文件中新增camera节点,主要关注节点中的IIC地址、sensro的ID信息、电压设定信息:
2.在目录kernel/drivers/media/platform/msm/camera_v2/sensor/目录新增xxsensor.c文件,主要填充msm_sensor_power_setting结构体:sensor上电的包含的引脚设定和电压设定,具体格式可以参考同目录下的其他文件。
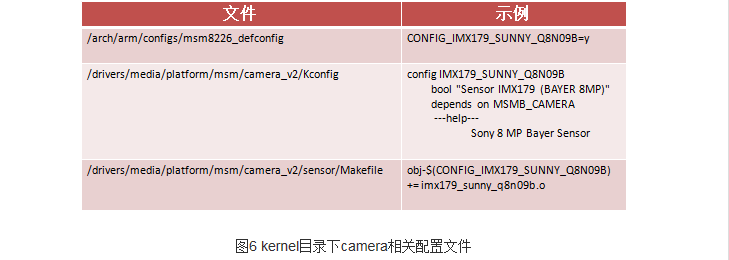
3.kernel下面的相关mk文件:
其他:如果sensor中带有eeprom,需要在dts文件中增加eeprom的节点信息;同样,sensor带有对焦功能,需要在dts文件中增加actuator节点信息;对于带eeprom的sensor,还需要配置eeprom的时钟控制代码(有待研究)。
2.2vendor下代码移植
Vendor下面的代码主要是两部分,一个是sensor_libs目录下的sensor具体设定、配置文件,另一个是chromatix下面的ISP效果文件。具体为:
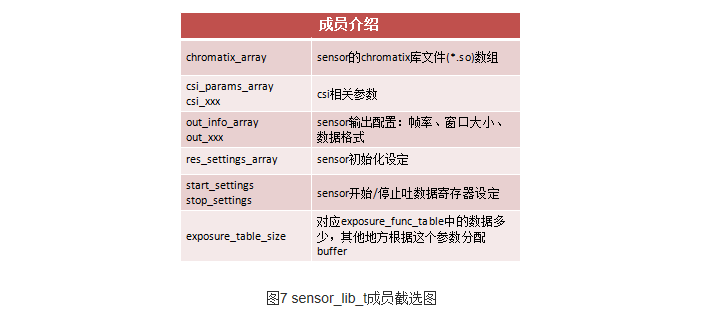
1.sensor_libs目录下文件:包括一个Android.mk文件和一个.c文件。其中Android.mk文件参考同目录下其他.mk文件修改和对应sensor有关设定即可;.c文件中需要填充的为一个sensor_lib_t类型的结构体:
2.chromatix目录下相关文件,在对应sensor目录下包含4个目录和一个Android文件,总共13个文件,这些文件都会由chromatix调试工具生成。下面为IMX179文件实例:
3.vendor下还有eeprom文件,模组自带的eeprom数据处理相关;AF相关文件,调试工具生成的关于AF的效果文件;配置文件,把需要编译的模块填进配置文件中。
网贷排名
标致3008口碑
模拟炒外汇
高通骁龙排行
网上贷款
外汇公司
 网贷排名
网贷排名
 标致3008口碑
标致3008口碑
模拟炒外汇
高通骁龙排行
网上贷款
结构体msm_camera_sensor_slave_info定义在media/msm_cam_sensor.h中:
char sensor_name[32]; //sensor名称
char eeprom_name[32]; //eeprom名称
char actuator_name[32]; //actuator名称
enum msm_sensor_camera_id_t camera_id; //camera id号
uint16_t slave_addr; //从地址
enum msm_camera_i2c_reg_addr_type addr_type; //camera i2c寄存器地址类型
struct msm_sensor_id_info_t sensor_id_info; //sensor 芯片id信息
struct msm_sensor_power_setting_array power_setting_array; //上电序列
uint8_t is_init_params_vaild; //初始化参数是否有效
struct msm_sensor_init_params sensor_init_params; //sensor初始化参数
};
1.1、枚举类型msm_sensor_camera_id_t的定义如下:
CAMERA_0, //camera id 号0
CAMERA_1, //camera id 号1
CAMERA_2, //camera id 号2
CAMERA_3, //camera id 号3
MAX_CAMERAS, //支持的最大id号
};
1.2、枚举类型msm_camera_i2c_reg_addr_type的定义如下:
MSM_CAMERA_I2C_BYTE_ADDR = 1, //1字节型
MSM_CAMERA_I2C_WORD_ADDR, //2字型
MSM_CAMERA_I2C_3B_ADDR, //3字节型
};
1.3、结构体msm_sensor_id_info_t的定义如下:
uint16_t sensor_id_reg_addr; //对应sensor id号的寄存器地址
uint16_t sensor_id; //sensor id号
};
1.4、结构体 msm_sensor_power_setting_array的定义如下:
SENSOR_CLK,
SENSOR_GPIO,
SENSOR_VREG,
SENSOR_I2C_MUX,
};
struct msm_sensor_power_setting{ //上电序列
enum msm_sensor_power_seq_type seq_type;
uint16_t seq_val;
long config_val;
uint16_t delay;
void *data[10];
};
struct msm_sensor_power_setting_array{
struct msm_sensor_power_setting *power_setting;
uint16_t size;
struct msm_sensor_power_setting *power_down_setting;
uint16_t size_down;
};
1.5、结构体msm_sensor_init_params的定义如下:
BACK_CAMERA_B, //后摄
FRONT_CAMERA_B, //前摄
INVALID_CAMERA_B, //非法
}
struct msm_sensor_init_params{
/* mask of modes supported: 2D, 3D */
int modes_supported; //支持camera的模式
/* sensor position: front, back */
enum camb_position_t position; //sensor的位置
/* sensor mount angle */
uint32_t sensor_mount_angle; //sensor安装的角度
};
举例:
支持模式的值是在枚举类型camerab_mode_t中:
enum camerab_mode_t{
CAMERA_MODE_2D_B = (1<<0), //2D
CAMERA_MODE_3D_B = (1<<1), //3D
CAMERA_MODE_INVALID = (1<<2), //非法
};
2D模式:平面图像模式。
3D模式:拍照出使裸眼观看就具有立体感的图像的模式,需要使用双摄像头。
sensor安装角度的值是宏定义,在sensor_lib.h中:
/*MOUNT ANGLE >= to this value is considered invalid in sensor lib */
#define SENSOR_MOUNTANGLE_360 360 //360度
/* Sensor mount angle. */
#define SENSOR_MOUNTANGLE_0 0 //0度
#define SENSOR_MOUNTANGLE_90 90 //90度
#define SENSOR_MOUNTANGLE_180 180 //180度
#define SENSOR_MOUNTANGLE_270270 //270度
2.、Sensor 输出设置
2.1 、Sensor输出格式设置
连接模式:parallel/MIPI. msm8974只支持MIPI.
Raw图格式:8/10/12 bits.
结构体sensor_output_t 定义在sensor_lib.h中:
sensor_output_format_t output_format; //输出格式
sensor_connection_mode_t connection_mode; //连接模式
sensor_raw_output_t raw_output; //raw图格式
}sensor_output_t;
其中sensor_output_format_t, sensor_connection_mode_t, sensor_raw_output_t为枚举类型,定义如下:
SENSOR_BAYER, //Bayer格式
SENSOR_YCBCR //YUV格式(Y,Cb,Cr)
}sensor_output_format_t;
typedef enum{
SENSOR_PARALLEL, //并行
SENSOR_MIPI_CSI, //MIPI CSI
SENSOR_MIPI_CSI_1, //CSI1
SENSOR_MIPI_CSI_2, //CSI2
}sensor_connection_mode_t;
typedef enum{
SENSOR_8_BIT_DIRECT, //8-bit
SENSOR_10_BIT_DIRECT, //10-bit
SENSOR_12_BIT_DIRECT, //12-bit
}sensor_raw_output_t;
10-bit RAW图数据是通过数据包的格式进行传输的,打包之后的数据格式为8-bit。下表是对RAW10数据包格式限制条件的说明,每一个数据包的长度必须是表中数值的整数倍,bit位传输顺序服从CSI-2规则,LSB优先。
结构体sensor_pix_fmt_info_t定义在sensor_lib.h中:
uint32_t fourcc;
};
像素格式的值V4L2_PIX_FMT_SRGGB10是宏定义在linux/videodev2.h中,如下:
#define v4l2_fourcc(a,b,c,d) \
((__u32)(a) | ((__u32)(b) << 8) | ((__u32)(c) << 16) | ((__u32)(d) << 24) //为什么这么做?
/* www.siliconimaging.com/RGB%20Bayer.htm */
#define V4L2_PIX_FMT_SBGGR8 v4l2_fourcc('B','A','8','1') //BGGR 8bit
#define V4L2_PIX_FMT_SGBRG8 v4l2_fourcc('G','B','R','G') //GBRG 8bit
#define V4L2_PIX_FMT_SGRBG8 v4l2_fourcc('G','R','B','G') //GRBG 8bit
#define V4L2_PIX_FMT_SRGGB8 v4l2_fourcc('R','G','G','B') //RGGB 8bit
#define V4L2_PIX_FMT_SBGGR10 v4l2_fourcc('B','G','1','0') //BGGR 10bit
#define V4L2_PIX_FMT_SGBRG10 v4l2_fourcc('G','B','1','0') //GBRG 10bit
#define V4L2_PIX_FMT_SGRBG10 v4l2_fourcc('B','A','1','0') //GRBG 10bit
#define V4L2_PIX_FMT_SRGGB10 v4l2_fourcc('R','G','1','0') //RGGB 10bit
#define V4L2_PIX_FMT_SBGGR12 v4l2_fourcc('B','G','1','2') //BGGR 12bit
#define V4L2_PIX_FMT_SGBRG12 v4l2_fourcc('G','B','1','2') //GBRG 12bit
#define V4L2_PIX_FMT_SGRBG12 v4l2_fourcc('B','A','1','2') //GRBG 12bit
#define V4L2_PIX_FMT_SRGGB12 v4l2_fourcc('R','G','1','2') //RGGB 12bit
像素格式的值MSM_V4L2_PIX_FMT_META是宏定义在media/msm_cam_sensor.h中:
#define MSM_V4L2_PIX_FMT_META v4l2_fourcc('M','E','T','A')
2.3 、Sensor输出尺寸设置
2.3.1、 各参数含义解释
结构体sensor_lib_out_info_t的定义如下:
struct sensor_lib_out_info_t {
uint16_t x_output; //sensor 输出宽度(pixels)
uint16_t y_output; //sensor输出高度(pixels)
uint16_t line_lenth_pclk; //每一帧每一行多少个pixels
uint16_t frame_length_lines; //每一帧多少行
uint32_t vt_pixel_clk; //sensor 扫描速率(pixels per sec)
uint32_t op_pixel_clk; //sensor实际输出速率(pixels per sec)
uint16_t bining_factor; /*?: 1 if average is taken, >1 if sum is taken(applies only for if this resolution has binnig) */
float min_fps; //sensor支持的最小帧率
float max_fps; //sensor支持的最大帧率
uint32_t mode; //分辨率所对应的模式
};
使用Chromatix软件进行tuning设置Image Width和Image Height的值时分别参考此处x_output和y_output。
line_length_pckl 和frame_length_lines 是指包含blanking的宽度值和高度值。
line_lenth_pclk和frame_length_lines决定帧的大小。
什么是blanking?
vt_pixel_clk时钟用于内部图像处理,计算曝光时间和帧率等。
曝光时间计算见4.1。
帧率:frame rate = vt_pixel_clk / (line_lenth_pclk * frame_length_lines).
op_pixel_clk = (sensor 输出实际比特率)/bits-per-pixel.
其中的mode的值是宏定义的,如下:
/* HFR模式不用于常规的camera,camcorder */
#define SENSOR_DEFAULT_MODE (1 << 0) //默认模式
#define SENSOR_HFR_MODE (1 << 1) //高帧率模式,用于捕捉慢动作视频
#define SENSOR_HDR_MODE (1 << 2) //高动态范围图像模式
结构体sensor_lib_out_info_array的定义如下:
struct sensor_lib_out_info_array {
struct sensor_lib_out_info_t *out_info; //指向sensor_lib_out_info_t结构体的指针
uint16_t size; //sensor_lib_out_info_t结构体数组长度
};
ARRAY_SIZE的宏定义如下:
#define ARRAY_SIZE(x) (sizeof(x) / sizeof((x)[0])) //获取数组长度。
2.3.2 、x_output & y_output参数设置
x_output和y_output是sensor输出图像的重要参数,分别代表了图像的宽度和高度,单位是pixel。上层camera app最终就是从这里获取的sensor输出图像的宽度和高度信息,然后根据此信息裁剪出各种尺寸的图片。
因此imx230的x_output和y_output参数设置是不能小于上图中的最大尺寸,同时要与实际sensor输出图像的尺寸一致。
Imx230中控制sensor输出图像尺寸的寄存器关系如下图:
由关系图可以看出,最终控制sensor图像输出尺寸的是寄存器X_OUT_SIZE和Y_OUT_SIZE,所以x_output和y_output的值要与这两个寄存器的值一致。
一般sensor提供商所提供的这些寄存器的设置,都是由寄存器X_ADD_STA ,Y_ADD_STA, X_ADD_END和Y_ADD_END所确定的尺寸就是sensor最后输出的尺寸,这样后面的bining、sub-sampling、digtal crop、scaling 处理都可以省去以节约拍照时间。
2.4 、Sensor输出寄存器地址设置
结构体 msm_sensor_output_reg_addr_t的定义如下:
struct msm_sensor_output_reg_addr_t {
uint16_t x_output; //寄存器X_OUT_SIZE地址
uint16_t y_output; //寄存器Y_OUT_SIZE地址
uint16_t line_length_pclk; //寄存器LIN_LENGTH_PCK地址
uint16_t frame_length_lines; //寄存器FRM_LENGTH_LINES地址
};
2.5、 图像裁剪设置
struct sensor_crop_parms_t {
uint16_t top_crop; //距离顶部的距离
uint16_t bottom_crop; //距离底部的距离
uint16_t left_crop; //距离左侧的距离
uint16_t right_crop; //距离右侧的距离
} ;
struct sensor_lib_crop_params_array{
struct sensor_crop_parms_t *crop_params; //结构体指针
uint16_t size; //结构数组长度
};
imx230对于2种分辨率的图像不裁剪。
2.6 、分辨率切换设置
imx230使用2种分辨率,枚举类型sensor_res_cfg_type_t说明了进行分辨率切换时所需要进行的操作,在sensor_lib.h中定义如下:
SENSOR_SET_STOP_STREAM, //停止数据传输
SENSOR_SET_START_STREAM, //开始数据传输
SENSOR_SET_NEW_RESOLUTION, //设置新的分辨率
SENSOR_SEND_EVENT, //发送事件
SENSOR_SET_CSIPHY_CFG, //CSIPHY参数设置
SENSOR_SET_CSID_CFG, //CSID参数设置
SENSOR_LOAD_CHROMATIX, //加载chromatix参数
} sensor_res_cfg_type_t;
imx230_res_cfg[]数组序列对应着切换分辨率的操作顺序:
停止数据传输 ----> 设置新的分辨率 ----> CSIPHY参数设置 ----> CSID参数设置
----> 加载chromatix参数 ----> 发送事件 ----> 开始数据传输.
3、Camera I2C寄存器设置
I2C寄存器的设置都会用到这两种结构体:msm_camera_i2c_reg_array 和msm_camera_i2c_reg_setting。其定义在media/msm_camera.h中:
struct msm_camera_i2c_reg_array {
uint16_t reg_addr; //寄存器地址
uint16_t reg_data; //寄存器数据
};
struct msm_camera_i2c_reg_setting {
struct msm_camera_i2c_reg_array *reg_setting; //结构体指针
uint16_t size; //结构数组长度
enum msm_camera_i2c_reg_addr_type addr_type; //地址类型
enum msm_camera_i2c_data_type data_type; //数据类型
uint16_t dalay; //延时
};
其中枚举类型msm_camera_i2c_reg_addr_type在1.2中已经作过介绍了。 msm_camera_i2c_data_type的定义如下:
enum msm_camera_i2c_data_type {
MSM_CAMERA_I2C_BYTE_DATA = 1,
MSM_CAMERA_I2C_WORD_DATA,
MSM_CAMERA_I2C_SET_BYTE_MASK,
MSM_CAMERA_I2C_UNSET_BYTE_MASK,
MSM_CAMERA_I2C_SET_WORD_MASK,
MSM_CAMERA_I2C_UNSET_WORD_MASK,
MSM_CAMERA_I2C_SET_BYTE_WRITE_MASK_DATA,
};
3.1、寄存器初始化设置
寄存器初始化流程为:
上电 —> 外部时钟输入 —> XCLR关闭—> 外部时钟寄存器设置 —> 全局寄存器设置 —> Load Setting
之后寄存器设置根据不同分辨率具有不同的设置。
Load Setting —> 模式设置 —> 输出格式设置 —> 时钟设置 —> Data rate设置 —> 曝光时间设置 —> Gain值设置 —> HDR设置 —> DPC2D设置 —> LSC设? —> Stats 设置
3.2 、Grouphold on设置
地址0x0104就是寄存器GRP_PARAM_HOLD的地址,当其寄存器的值设为1时,写入的寄存器数据被暂存的buffer寄存器中。
3.3 、Grouphold off设置
3.4、 启动输出设置
启动数据输出流程分为两种情况:
情况1:在上电之后
(1)准备上电序列时序
(2)PLL锁相环参数设置
(3)初始化设置
(4)设置读取模式(起始/结束位置,大小,曝光时间,gain值)
(5)设置MIPI接口参数
(6)设置寄存器MODE_SEL的值为1,准备数据输出
在经过MIPI唤醒时间和初始化时间之后,开始输出第一帧图像数据。
情况2:在经过一次数据输出之后
(1)设置寄存器MODE_SEL的值为0,进入待命状态
(2)等待MIPI的FE package
(3)设置下一次数据输出模式
(4)设置寄存器MODE_SEL的值为1,准备数据输出
在经过MIPI唤醒时间和初始化时间之后,开始输出第一帧图像数据。
3.5、停止输出配置
4、曝光设置
结构体msm_sensor_exp_gain_info_t定义在sensor_lib.c中:
struct msm_sensor_exp_gain_info_t {
uint16_t coarse_int_time_addr; //粗曝光时间寄存器地址
uint16_t global_gain_addr; //模拟增益寄存器地址
uint16_t vert_offset; //曝光行偏置
};
粗曝光时间单位为lines,用于计算曝光时间,计算关系如下:
Tsh = Tline * (COARSE_INTEG_TIME + FINE_INTEG_TIME / LINE_LENGTH_PCK)
其中细曝光时间单位为pixels,是定值,其寄存器为只读寄存器。Tline为行曝光时间,为时间单位。计算如下:
Tline = LINE_LENGTH_PCK * VTPXCK_period
曝光行偏置用于设定以下关系:
COARSE_INTEG_TIME ≤ frame_length_lines – vert_offset
4.2、 AEC参数设置
结构体sensor_aec_data_t定义在sensor_lib.h中:
typedef enum {
SENSOR_MODE_SNAPSHOT, //快照模式
SENSOR_MODE_RAW_SNAPSHOT, //raw图快照模式
SENSOR_MODE_PREVIEW, //预览模式
SENSOR_MODE_VIDEO, //视频录像模式
SENSOR_MODE_VIDEO_HD, //高清视频录像模式
SENSOR_MODE_HFR_60FPS, //60帧率HFR模式
SENSOR_MODE_HFR_90FPS, //90帧率 HFR模式
SENSOR_MODE_HFR_120FPS, //120帧率HFR模式
SENSOR_MODE_HFR_150FPS, //150帧率HFR模式
SENSOR_MODE_ZSL, //零秒快拍
SENSOR_MODE_INVALID, //非法
} sensor_mode_t;
typedef struct {
sensor_mode_t op_mode; //sensor 模式
uint32_t pixels_per_line; //每一帧每一行多少个pixels
uint32_t lines_per_frame; //每一帧多少行
uint32_t pclk; //vt_pixel_clk
uint32_t max_fps; //最大帧率
float digital_gain; //数字增益
float stored_digital_gain;
float max_gain; //最大数字增益
uint32_t max_linecount; //最大曝光行数
} sensor_aec_data_t;
4.3 、曝光增益gain值设置
模拟增益real_gain值的范围是1至8, 对应到reg_gain的范围为0到448。real_gain与reg_gain的关系为:
real_gain = 512 / (512 - reg_gain)
结构体sensor_exposure_info_t定义在sensor_lib.h中:
typedef struct {
uint16_t reg_gain; //寄存器gain值
uint16_t line_count; //曝光行数
float digital_gain;
float sensor_real_gain; //sensor的模拟gain值
float sensor_digital_gain; //sensor的数字gain值
} sensor_exposure_info_t;
5、镜头参数设置
结构体sensor_lens_info_t定义在sensor_lib.c中:
typedef struct {
float focal_length; //焦距
float pix_size; //像素大小
float f_number; //光圈
float total_f_dist;
float hor_view_angle; //水平视角
float ver_view_angle; //垂直视角
} sensor_lens_info_t;
6、Chromatix参数
每一种分辨率都必须有对应的chromatix库文件。这里对应2种分辨率,设置的是相应的库文件名称。结构体sensor_lib_chromatix_t定义在sensor_lib.h中:
struct sensor_lib_chromatix_t {
char *common_chromatix;
char *camera_preview_chromatix;
char *camera_snapshot_chromatix;
char *camcorder_chromatix;
char *liveshot_chromatix;
};
其数据成员都是字符型指针,用来记录不同分辨率下不同模式的库文件名称。
7. MIPI接收器配置
结构体 csi_lane_params_t定义在media/msm_camera.h中:
struct csi_lane_params_t {
uint16_t csi_lane_assign; //端口映射设置
uint8_t csi_lane_mask; //标识哪一个lane被使用
uint8_t csi_if; //未使用
uint8_t csid_core[2]; //csid硬件选择
uint8_t csi_phy_sel; //csi-phy设备选择
};
csi_lane_assign —— 有时候用户的MIPI lanes可能使用不同与MSM参考设置的端口映射。比如,sensor的lane0连接到MSM的数据lane4等。对于这种情况,csi_lane_assign参数能设置正确的端口映射。csi_lane_assign是一个16bit的值,每位的含义参见下表。lane1用于MIPI时钟,客户不可用它来映射到任何数据lane。
csi_lane_mask —— 用于表示哪些lane被使用,这是一个8位值,每一位含义如下:
Bit position Represents
7:5 保留
4 数据lane4是否使用:
- 0 :不
- 1 :是
3 数据lane3是否使用:
- 0 :不
- 1 :是
2 数据lane2是否使用:
- 0 :不
- 1 :是
1 数据lane1是否使用:
- 0 :不
- 1 :是
注意:该位必须设置为1
0 数据lane0是否使用:
- 0 :不
- 1 :是
比如0x1F表示4条数据lane和时钟都被使用。
csi_if —— 暂不使用。
csid_core —— 设置哪个CSID硬件被该sensor使用。两个并发的sensor不能使用同一个CSID硬件。
csi_phy_sel —— 设置哪个CSI-PHY硬件被该sensor使用。对于每一个sensor来说必须是独一无二的,除非有额外的MIPI桥连接两个sensor到同一个PHY接口上。
7.2 、虚拟通道设置
CSI2传输的数据包包头部分的起始1byte为数据标志符(Data Identifier, DI),由VC[7:6](Virtual Channel)和DT[5;0](Data Type)组成。通过不同的VC和DT值来标志不同的数据流,占2个bit位的虚拟通道VC允许最多4个数据流交叉传输,其取值范围为0~3.
下表表示不同的TD的取值及对应的数据格式。
结构体 msm_camera_csid_vc_cfg用于保存虚拟通道的设置信息,在media/msm_camera.h中定义:
struct msm_camera_csid_vc_cfg {
uint8_t cid; //通道号
uint8_t dt; //数据类型
uint8_t decode_format; //解码格式
};
imx230的设置如下:
其数据类型和解码格式的值是宏定义的,其中数据类型的宏定义是根据上述DT表得来的。如下:
#define CSI_EMBED_DATA 0x12
#define CSI_RESERVED_DATA_0 0x13
#define CSI_YUV422_8 0x1E
#define CSI_RAW8 0x2A
#define CSI_RAW10 0x2B
#define CSI_RAW12 0x2C
#define CSI_DECODE_6BIT 0
#define CSI_DECODE_8BIT 1
#define CSI_DECODE_10BIT 2
#define CSI_DECODE_DPCM_10_8_10 5
7.3 、数据流设置
uint16_t vc_cfg_size;
struct msm_camera_csid_vc_cfg *vc_cfg; //虚拟通道设置
struct sensor_pix_fmt_info_t *pix_fmt_fourcc;//像素格式
} sensor_stream_info_t;
typedef struct _sensor_stream_info_array_t {
sensor_stream_info_t *sensor_stream_info;
uint16_t size;
} sensor_stream_info_array_t;
7.4、 CSID和CSI-PHY参数设置
struct msm_camera_csid_lut_params {
uint8_t num_cid; //虚拟通道个数
struct msm_camera_csid_vc_cfg *vc_cfg; //虚拟通道参数
};
struct msm_camera_csid_params {
uint8_t lane_cnt; //使用lane的数目
uint16_t lane_assign;
uint8_t phy_sel;
struct msm_camera_csid_lut_params lut_params;
};
struct msm_camera_csiphy_params {
uint8_t lane_cnt;
uint8_t settle_cnt;
uint16_t lane_mask;
uint8_t combo_mode;
uint8_t csid_core;
};
struct msm_camera_csi2_params {
struct msm_camera_csid_params csid_params; //CSID参数
struct msm_camera_csiphy_params csiphy_params; //CSI-PHY参数
};
lane_cnt ——有多少数据 lane 用于数据传输. 该值必须在 sensor 最大能力范围内,而且sensor 寄存器设置必须与该 lane 数匹配.
settle_cnt ——该值须和 sensor 的特性匹配, 保证 sensor 的 MIPI 传输和 MSM 的 MIPI 接收能同步.
客户可以对不同的分辨率模式使用不同CSI 参数设置。imx230采用两种分辨率,但是使用相同的CSI设置。
8、imx230_ofilm_open_lib
在imx230_lib.c中,最后将所有的参数设置都放入sensor_lib_t类型的结构体sensor_lib_ptr中,定义函数imx230_ofilm_open_lib()来返回sensor_lib_ptr的地址,供外界调用。结构体sensor_lib_t涵盖了关于camera设置的几乎全部信息。如下:
typedef struct {
/* sensor slave info */
struct msm_camera_sensor_slave_info *sensor_slave_info;
/* sensor info */
struct msm_sensor_init_params *sensor_init_params;
/* name of the AF actuator (if any)*/
char* actuator_name;
/* name of the eeprom (if any)*/
char* eeprom_name;
/* sensor output settings */
sensor_output_t *sensor_output;
/* sensor output register address */
struct msm_sensor_output_reg_addr_t *output_reg_addr;
/* sensor exposure gain register address */
struct msm_sensor_exp_gain_info_t *exp_gain_info;
/* sensor aec info */
sensor_aec_data_t *aec_info;
/* sensor snapshot exposure wait frames info */
uint16_t snapshot_exp_wait_frames;
/* number of frames to skip after start stream info */
uint16_t sensor_num_frame_skip;
/* number of frames to skip after start HDR stream info */
uint16_t sensor_num_HDR_frame_skip;
/* sensor pipeline delay */
uint32_t sensor_max_pipeline_frame_delay;
/* sensor exposure table size */
uint16_t exposure_table_size;
/* sensor lens info */
sensor_lens_info_t *default_lens_info;
/* csi lane params */
struct csi_lane_params_t *csi_lane_params;
/* csi cid params */
struct msm_camera_csid_vc_cfg *csi_cid_params;
/* sensor port info that consists of cid mask and fourcc mapaping */
sensor_stream_info_array_t *sensor_stream_info_array;
/* csi cid params size */
uint16_t csi_cid_params_size;
/* init settings */
struct sensor_lib_reg_settings_array *init_settings_array;
/* start settings */
struct msm_camera_i2c_reg_setting *start_settings;
/* stop settings */
struct msm_camera_i2c_reg_setting *stop_settings;
/* group on settings */
struct msm_camera_i2c_reg_setting *groupon_settings;
/* group off settings */
struct msm_camera_i2c_reg_setting *groupoff_settings;
/* resolution config table */
struct sensor_res_cfg_table_t *sensor_res_cfg_table;
/* resolution settings */
struct sensor_lib_reg_settings_array *res_settings_array;
struct sensor_lib_out_info_array *out_info_array;
struct sensor_lib_csi_params_array *csi_params_array;
struct sensor_lib_crop_params_array *crop_params_array;
struct sensor_lib_chromatix_array *chromatix_array;
/* video_hdr mode info*/
struct sensor_lib_meta_data_info_array *meta_data_out_info_array;
/* exposure funtion table */
sensor_exposure_table_t *exposure_func_table;
/* exposure info */
sensor_exposure_info_t exposure_info;
/* flag to sync exp and gain */
uint8_t sync_exp_gain;
/* video hdr func table */
sensor_video_hdr_table_t *video_hdr_awb_lsc_func_table;
/* scale size tbl count*/
uint8_t scale_tbl_cnt;
/* function to get scale size tbl*/
int32_t (*get_scale_tbl)(msm_sensor_dimension_t *);
/* supported Scene mode */
uint32_t *sensor_supported_scene_mode;
/* supported effect mode */
uint32_t *sensor_supported_effect_mode;
/* sensor pipeline immediate delay */
uint32_t sensor_max_immediate_frame_delay;
/* library specific data */
void *data;
} sensor_lib_t;