面向对象编程风格 & 基于对象编程(boost::bind/function)
我现在的回调方式是用boost::function,它在TR1时已经进入 C++ 标准库。Boost::function不对类型和函数名做限制,只对参数和返回类型做部分限制。如果你通过传统的继承来回调的话,你这个类型必须是framework里某个基类的派生类,函数的名字必须一样,参数列表必须一样,返回类型也基本肯定是一样。但是boost::function没有这些限制。Muduo网络库不是一个面向对象(object-oriented)的库,它是一个基于对象(object-based)的库。它在接口上没有表现出继承的特性,它用的是boost function的注册/回调机制,网络事件的表示就用 boost function。所以对Muduo来讲,它不需要知道你写什么类,也不强迫继承,更不需要知道你的函数叫什么名字,你给它的就是一个 boost function对象,限制就很少。而且你没有把对象指针传给网络库,那么就可以按原有的方式管理对象的生命期。”
--------------陈硕,开源社区访谈实录
面向对象的三大特点(封装,继承,多态)缺一不可。通常“基于对象”是使用对象,但是无法利用现有的对象模板产生新的对象类型,继而产生新的对象,也就是说“基于对象”没有继承的特点。而“多态”表示为父类类型的子类对象实例,没有了继承的概念也就无从谈论“多态”。现在的很多流行技术都是基于对象的,它们使用一些封装好的对象,调用对象的方法,设置对象的属性。但是它们无法让程序员派生新对象类型。他们只能使用现有对象的方法和属性。所以当你判断一个新的技术是否是面向对象的时候,通常可以使用后两个特性来加以判断。“面向对象”和“基于对象”都实现了“封装”的概念,但是面向对象实现了“继承和多态”,而“基于对象”没有实现这些。
本文通过实现Tread类来比较两种编程风格的差别。
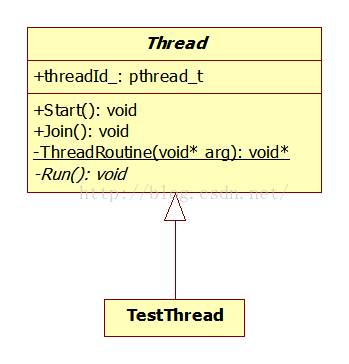
(一)面向对象编程风格
Tread类图
Thread.h
#ifndef _THREAD_H_
#define _THREAD_H_
#include
class Thread
{
public:
Thread();
virtual ~Thread();
void Start();
void Join();
void SetAutoDelete(bool autoDelete);
private:
static void *ThreadRoutine(void *arg); //没有隐含的this 指针
virtual void Run() = 0;
pthread_t threadId_;
bool autoDelete_;
};
#endif // _THREAD_H_
#include "Thread.h"
#include
using namespace std;
Thread::Thread() : autoDelete_(false)
{
cout << "Thread ..." << endl;
}
Thread::~Thread()
{
cout << "~Thread ..." << endl;
}
void Thread::Start()
{
pthread_create(&threadId_, NULL, ThreadRoutine, this);
}
void Thread::Join()
{
pthread_join(threadId_, NULL);
}
void *Thread::ThreadRoutine(void *arg)
{
Thread *thread = static_cast(arg);
thread->Run(); //线程结束,线程对象也得析构
if (thread->autoDelete_)
delete thread;
return NULL;
}
void Thread::SetAutoDelete(bool autoDelete)
{
autoDelete_ = autoDelete;
} #include "Thread.h"
#include
#include
using namespace std;
class TestThread : public Thread
{
public:
TestThread(int count) : count_(count)
{
cout << "TestThread ..." << endl;
}
~TestThread()
{
cout << "~TestThread ..." << endl;
}
private:
void Run()
{
while (count_--)
{
cout << "this is a test ..." << endl;
sleep(1);
}
}
int count_;
};
int main(void)
{
TestThread *t2 = new TestThread(5);
t2->SetAutoDelete(true);
t2->Start();
t2->Join();
for (; ; )
pause();
return 0;
} (1) 基类的析构函数不用virtual会发生什么?
可能会产生内存泄露。如果在派生类中申请了内存空间,并在其析构函数中释放,如果此时基类的析构函数不是virtual,就不会触发动态绑定,因而只会调用基类的析构函数,从而导致派生类对象的一些内存空间没有被释放,导致内存泄露。
(2) Thread类中 virtual void Run()=0 是纯虚函数,含有纯虚函数的类是抽象类,不能生成对象,所以要继承此基类并实现Run();
(3) 线程结束和线程对象的销毁是不同的概念,线程对象的生命周期要等到作用域结束。如果想要实现线程执行完毕,线程对象自动销毁,就需要动态创建对象,使用 delete 在 run 之后就将线程对象 delete 销毁掉。(4)根据 pthread_create 的原型
int pthread_create(pthread_t *thread, const pthread_attr_t *attr,
void *(*start_routine) (void *), void *arg);
start_routine 参数是一般的函数指针,故不能直接将run() 作为此参数,因为run()是成员函数,隐含this指针,故实现一个静态成员函数ThreadRoutine(), 在里面调用run(),此外参数arg 我们传递this指针,在ThreadRoutine()内将派生类指针转换为基类指针来调用run()。
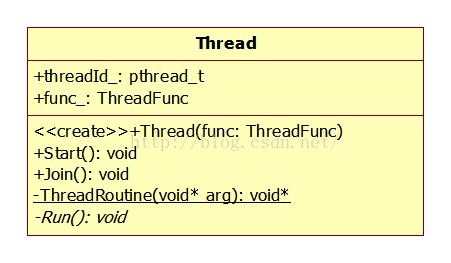
(5) 把run()实现为private是为了不让用户直接调用,因为这样根本就没有产生线程调度。(二)基于对象编程风格
函数适配器 boost bind/function用来实现转换函数接口。
#include
#include
#include
using namespace std;
class Foo
{
public:
void memberFunc(double d, int i, int j)
{
cout << d << endl;//打印0.5
cout << i << endl;//打印100
cout << j << endl;//打印10
}
};
int main()
{
Foo foo;
boost::function fp = boost::bind(&Foo::memberFunc, &foo, 0.5, _1, 10);
fp(100);
boost::function fp2 = boost::bind(&Foo::memberFunc, &foo, 0.5, _1, _2);
fp2(100, 200);
boost::function fp3 = boost::bind(&Foo::memberFunc, boost::ref(foo), 0.5, _1, _2);
fp3(55, 66);
return 0;
}
fp(100); 等价于 (&foo)->memberFunc(0.5, 100, 10); 即_1 是占位符,如果绑定的是一般的函数,则bind 中的参数中不再需要this指针,当然一般函数也没有类名前缀。成员函数的取地址符号不可以省略。
boost::ref() 表示引用,fp3(55, 66); 相当于foo.memberFunc(0.5, 55, 66);
typedef boost::function
#ifndef _THREAD_H_
#define _THREAD_H_
#include
#include
class Thread
{
public:
typedef boost::function ThreadFunc;
explicit Thread(const ThreadFunc &func);
void Start();
void Join();
void SetAutoDelete(bool autoDelete);
private:
static void *ThreadRoutine(void *arg);
void Run();
ThreadFunc func_;
pthread_t threadId_;
bool autoDelete_;
};
#endif // _THREAD_H_ #include "Thread.h"
#include
using namespace std;
Thread::Thread(const ThreadFunc &func) : func_(func), autoDelete_(false)
{
}
void Thread::Start()
{
pthread_create(&threadId_, NULL, ThreadRoutine, this);
}
void Thread::Join()
{
pthread_join(threadId_, NULL);
}
void *Thread::ThreadRoutine(void *arg)
{
Thread *thread = static_cast(arg);
thread->Run();
if (thread->autoDelete_)
delete thread;
return NULL;
}
void Thread::SetAutoDelete(bool autoDelete)
{
autoDelete_ = autoDelete;
}
void Thread::Run()
{
func_();
} Thread_test.cpp:
#include "Thread.h"
#include
#include
#include
using namespace std;
class Foo
{
public:
Foo(int count) : count_(count)
{
}
void MemberFun()
{
while (count_--)
{
cout << "this is a test ..." << endl;
sleep(1);
}
}
void MemberFun2(int x)
{
while (count_--)
{
cout << "x=" << x << " this is a test2 ..." << endl;
sleep(1);
}
}
int count_;
};
void ThreadFunc()
{
cout << "ThreadFunc ..." << endl;
}
void ThreadFunc2(int count)
{
while (count--)
{
cout << "ThreadFunc2 ..." << endl;
sleep(1);
}
}
int main(void)
{
Thread t1(ThreadFunc);
Thread t2(boost::bind(ThreadFunc2, 3));
Foo foo(3);
Thread t3(boost::bind(&Foo::MemberFun, &foo));
Foo foo2(3);
Thread t4(boost::bind(&Foo::MemberFun2, &foo2, 1000));
t1.Start();
t2.Start();
t3.Start();
t4.Start();
t1.Join();
t2.Join();
t3.Join();
t4.Join();
return 0;
} class EchoServer
{
public:
EchoServer()
{
server_.SetConnectionCallback(boost::bind(&EchoServer::OnConnection, ...));
...
}
void OnConnection()
{
..
}
TcpServer server_;
};