android8.1上新增camera设备
在工作中,camera这一块上,可能会有各种各样的需求。比如有人想新增一个虚拟摄像头,当用户app打开摄像头设备时,打开的不是系统默认的camera hal代码,而是自己指定的代码,用自己事先准备好的视频数据,来喂给app;也有人想在系统默认的一套app框架上,新增一个外接的usbcamera,并且要能溶入到camera框架中。app只需要指定usbcamera的id,就能像打开普通摄像头那样,去打开我们的usbcamera;也有人,想在现有的框架上,同时兼容老的hal1+api1流程的android8.0之前的camera,又想新增一个符合android8.0的hidl接口规范的camera模块。
上面所有的需求,归纳起来,核心的就是一点,即如何去新增一个camera hal模块。我这篇博客,是以在mtk android8.0上新增一个usbcamera hal模块来讲的。当然,新增虚拟摄像头,流程跟这个也是一模一样的。
好了,既然是想在android8.0上新增一套符合hidl接口规范的camera流程,那么我们先要了解一下,android原生的hidl接口下的camera流程,下面我们先讲一讲这块。
在android8.0之前,frameworks层的cameraservice和hal层的camera代码是在同一个进程的,这样不利于hal层部份独立升级。针对这个问题,8.0后,就推出了hidl机制,将frameworks层和hal层分成了两个进程,从而进行了解耦。借用网上的一张图片来大致的表明下这个区别:
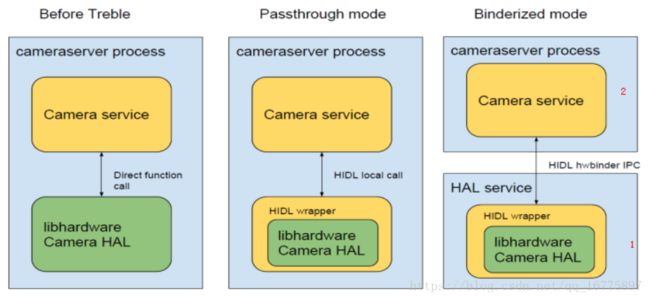
这么一来,看似调用变复杂了,但其实是殊途同归,hal层代码和之前基本上没有变化。具体到camera而言,就是在frameworks层和hal层中间,增加了一个cameraProvider来做为两方联系的桥梁。现在的调用流程,再借网上一张图一用:
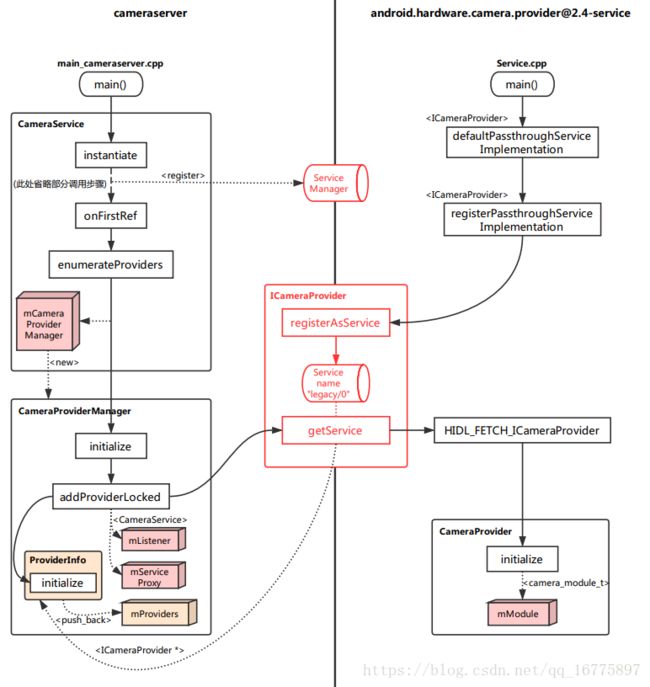
接下来以上面这张图来大致的说一下调用流程:
1.) 开机注册cameraProvider(cameraProvider里会和具体的camera hal层对应起来)
2.) 开机实例化cameraService
3.) 查找并列出所有的cameraProvider(这一步会通过hw_get_module来将camera的hal层代码load出来)
这基本上就是camera开机后从frameworks加载到hal层的路线了。下面再具体一步步来分析。
开机注册cameraProvider
在我们的hardware\interfaces\camera\provider\2.4\default目录下,有一个[email protected]文件
service camera-provider-2-4 /vendor/bin/hw/[email protected]
class hal
user cameraserver
group audio camera input drmrpc
ioprio rt 4
capabilities SYS_NICE
writepid /dev/cpuset/camera-daemon/tasks /dev/stune/top-app/tasks当开机时,会自动调用这个文件去启动服务camera-provider-2-4,然后它会调用到/vendor/bin/hw/[email protected]这个文件。然后会调到hardware\interfaces\camera\provider\2.4\default\service.cpp
int main()
{
ALOGI("Camera provider Service is starting.");
// The camera HAL may communicate to other vendor components via
// /dev/vndbinder
android::ProcessState::initWithDriver("/dev/vndbinder");
return defaultPassthroughServiceImplementation("legacy/0", /*maxThreads*/ 6);
}
然后这里会用hidl的标准接口去将我们的"legacy/0"注册到服务上去。
system\libhidl\transport\include\hidl\LegacySupport.h
template
__attribute__((warn_unused_result))
status_t defaultPassthroughServiceImplementation(std::string name,
size_t maxThreads = 1) {
configureRpcThreadpool(maxThreads, true);
status_t result = registerPassthroughServiceImplementation(name);
if (result != OK) {
return result;
}
joinRpcThreadpool();
return 0;
} 在这里有一点要注意,这里的"legacy/0"必须要先在工程根目录 device/***/芯片名/manifest.xml里先声明,否则即使这里注册了,后面也会因为找不到而报错.
android.hardware.camera.provider
hwbinder
2.4
ICameraProvider
legacy/0
开机实例化cameraService
在frameworks\av\camera\cameraserver里有个cameraserver.rc, 它在开机的时候,也会自动启动.
service cameraserver /system/bin/cameraserver
class main
user cameraserver
group audio camera input drmrpc
ioprio rt 4
writepid /dev/cpuset/camera-daemon/tasks /dev/stune/top-app/tasks
然后它会调用到frameworks\av\camera\cameraserver\main_cameraserver.cpp
int main(int argc __unused, char** argv __unused)
{
signal(SIGPIPE, SIG_IGN);
//!++
#if 0
// Set 3 threads for HIDL calls
hardware::configureRpcThreadpool(3, /*willjoin*/ false);
#else
// Set 6 threads for HIDL calls, features need more threads to handle preview+capture
hardware::configureRpcThreadpool(6, /*willjoin*/ false);
#endif
//!--
sp proc(ProcessState::self());
sp sm = defaultServiceManager();
ALOGI("ServiceManager: %p", sm.get());
CameraService::instantiate();
ProcessState::self()->startThreadPool();
IPCThreadState::self()->joinThreadPool();
}
在这个main函数里,我们只需要关注CameraService::instantiate();这行代码. 我们的CameraService继承了BinderService.h.这个:instantiate()调用到了BinderService.h里的代码
frameworks\native\libs\binder\include\binder\BinderService.h
template
class BinderService
{
public:
static status_t publish(bool allowIsolated = false) {
sp sm(defaultServiceManager());
return sm->addService(
String16(SERVICE::getServiceName()),
new SERVICE(), allowIsolated);
}
static void publishAndJoinThreadPool(bool allowIsolated = false) {
publish(allowIsolated);
joinThreadPool();
}
static void instantiate() { publish(); }
static status_t shutdown() { return NO_ERROR; }
private:
static void joinThreadPool() {
sp ps(ProcessState::self());
ps->startThreadPool();
ps->giveThreadPoolName();
IPCThreadState::self()->joinThreadPool();
}
};
}; // namespa 从这个文件可以看出,instantiate最终还是调用到了IServiceManager里的addService, 将我们的cameraService注册到了系统的服务管理器里去了.
这里调用到CameraService后, 因为是开机第一次调用,它的引用计数为1,所以会调用到CameraService::onFirstRef()这个函数. 这个函数是从CameraService的父类RefBase里继承过来的.该函数在强引用sp新增引用计数时调用,什么意思?就是当 有sp包装的类初始化的时候调用.我们再看看cameraService::onFirstRef()
frameworks\av\services\camera\libcameraservice\CameraService.cpp
void CameraService::onFirstRef()
{
ALOGI("CameraService process starting");
BnCameraService::onFirstRef();
// Update battery life tracking if service is restarting
BatteryNotifier& notifier(BatteryNotifier::getInstance());
notifier.noteResetCamera();
notifier.noteResetFlashlight();
status_t res = INVALID_OPERATION;
res = enumerateProviders();
if (res == OK) {
mInitialized = true;
}
CameraService::pingCameraServiceProxy();
}
在这个函数里,我们只关注enumerateProviders(),这里就到了列出所有cameraProvider.
查找并列出所有的cameraProvider
status_t CameraService::enumerateProviders() {
status_t res;
Mutex::Autolock l(mServiceLock);
if (nullptr == mCameraProviderManager.get()) {
mCameraProviderManager = new CameraProviderManager();
res = mCameraProviderManager->initialize(this);
......
}
......
}这个函数里,创建了一个CameraProviderManager对象,并调进行了初始化.
frameworks\av\services\camera\libcameraservice\common\CameraProviderManager.cpp
status_t CameraProviderManager::initialize(wp listener,
ServiceInteractionProxy* proxy) {
std::lock_guard lock(mInterfaceMutex);
if (proxy == nullptr) {
ALOGE("%s: No valid service interaction proxy provided", __FUNCTION__);
return BAD_VALUE;
}
mListener = listener;
mServiceProxy = proxy;
// Registering will trigger notifications for all already-known providers
bool success = mServiceProxy->registerForNotifications(
/* instance name, empty means no filter */ "",
this);
if (!success) {
ALOGE("%s: Unable to register with hardware service manager for notifications "
"about camera providers", __FUNCTION__);
return INVALID_OPERATION;
}
// See if there's a passthrough HAL, but let's not complain if there's not
addProviderLocked(kLegacyProviderName, /*expected*/ false);
return OK;
}
在这个初始化函数里,我们只关注addProviderLocked, 我们可以看到,这个函数传进了一个kLegacyProviderName, 它的值定义在这个文件的上面:
const std::string kLegacyProviderName("legacy/0");
大家注意到了没有,它的值和我们之前hardware\interfaces\camera\provider\2.4\default\service.cpp里注册服务时return defaultPassthroughServiceImplementation
好了,再回到addProviderLocked这个函数来, 这个函数的作用, 就是去加载camera对应的hal层代码, 并将它的信息保存在ProviderInfo里,后面我们就可以通过这个ProviderInfo, 去实行addDevice、getCameraInfo等操作。
status_t CameraProviderManager::addProviderLocked(const std::string& newProvider, bool expected) {
for (const auto& providerInfo : mProviders) {
if (providerInfo->mProviderName == newProvider) {
ALOGW("%s: Camera provider HAL with name '%s' already registered", __FUNCTION__,
newProvider.c_str());
return ALREADY_EXISTS;
}
}
sp interface;
interface = mServiceProxy->getService(newProvider);
if (interface == nullptr) {
if (expected) {
ALOGE("%s: Camera provider HAL '%s' is not actually available", __FUNCTION__,
newProvider.c_str());
return BAD_VALUE;
} else {
return OK;
}
}
sp providerInfo =
new ProviderInfo(newProvider, interface, this);
status_t res = providerInfo->initialize();
if (res != OK) {
return res;
}
mProviders.push_back(providerInfo);
return OK;
} 这里先检查一下,传进来的newProvider是不是已经添加过,如果已经添加了,就不再处理,直接返回。如果没添加过,就会进行下一步的操作。这里的interface = mServiceProxy->getService(newProvider);,会调用到hardware\interfaces\camera\provider\2.4\default\CameraProvider.cpp的HIDL_FETCH_ICameraProvider函数。
ICameraProvider* HIDL_FETCH_ICameraProvider(const char* name) {
if (strcmp(name, kLegacyProviderName) != 0) {
return nullptr;
}
CameraProvider* provider = new CameraProvider();
if (provider == nullptr) {
ALOGE("%s: cannot allocate camera provider!", __FUNCTION__);
return nullptr;
}
if (provider->isInitFailed()) {
ALOGE("%s: camera provider init failed!", __FUNCTION__);
delete provider;
return nullptr;
}
return provider;
}
在这个函数里,会创建一个CameraProvider对象。
CameraProvider::CameraProvider() :
camera_module_callbacks_t({sCameraDeviceStatusChange,
sTorchModeStatusChange}) {
mInitFailed = initialize();
}bool CameraProvider::initialize() {
camera_module_t *rawModule;
int err = hw_get_module("camera", (const hw_module_t **)&rawModule);
if (err < 0) {
ALOGE("Could not load camera HAL module: %d (%s)", err, strerror(-err));
return true;
}
mModule = new CameraModule(rawModule);
err = mModule->init();
......
}在这个初始化函数中,会看到一个我们非常熟悉的函数hw_get_module。到这里,就跟我们android8.0之前的流程一模一样的了,都是去直接和hal层打交道了。
在CameraProvider里有一个地方值得大家注意
std::string cameraId, int deviceVersion) {
// Maybe consider create a version check method and SortedVec to speed up?
if (deviceVersion != CAMERA_DEVICE_API_VERSION_1_0 &&
deviceVersion != CAMERA_DEVICE_API_VERSION_3_2 &&
deviceVersion != CAMERA_DEVICE_API_VERSION_3_3 &&
deviceVersion != CAMERA_DEVICE_API_VERSION_3_4 ) {
return hidl_string("");
}
bool isV1 = deviceVersion == CAMERA_DEVICE_API_VERSION_1_0;
int versionMajor = isV1 ? 1 : 3;
int versionMinor = isV1 ? 0 : mPreferredHal3MinorVersion;
char deviceName[kMaxCameraDeviceNameLen];
snprintf(deviceName, sizeof(deviceName), "device@%d.%d/legacy/%s",
versionMajor, versionMinor, cameraId.c_str());
return deviceName;
}
从这里看来,如果我们的camera使用了hidl和hal打交道的话,我们hal里的版本号,必须是1.0或者是大于3.2的,如果我们的hal层的的版本号为3.0或3.1的话,是不能正确的加载成功的。
上面用到的图片,引用了https://blog.csdn.net/qq_16775897/article/details/81240600这个博客的,大家也可以去这篇博客看看。启动流程都是一致的,这博主也讲得比较详细。
好了,上面就将android8.0上camera hal层代码的加载流程基本讲完了。有了上面的基础,下面我们再来一步步的讲下,怎么去新增一个camera hal。
###############################################################################################################################################################################################################################################################################################################
移植一个camera hal,需要做的有以下几点:
1.)在device\mediatek\mt6580\manifest.xml里新增要增加的camera的instance
2.)在frameworks\av\services\camera\libcameraservice\common\CameraProviderManager.cpp里,将要添加的camera provider给addProviderLocked进来
3.)在hardware\interfaces\camera\provider\2.4\default\CameraProvider.cpp里将要增加的camera,通过hw_get_module这样给load进来。
4.)准备好对应的camera hal代码
配置manifest.xml
android.hardware.camera.provider
hwbinder
2.4
ICameraProvider
internal/0
legacy/1
因为mtkcamera已经有了一个camera hal1,名字为internal/0, 所以我们的usbcamera对应的名字跟在它的后面即可。注意,“legacy/1”这个名字的前面“legacy”这串,可以随便取,比如可以叫”abc/1",只要其他用到的地方都叫这个名字就可以。但是这个后面的“1”,不能弄错。前面已经为0了,这个就必须为1,同理,如果还有一个摄像头,就要为2了。因为在CameraProviderManager.cpp里的ProviderInfo::parseDeviceName,是通过后面这个数字,来取对应的id值的。如果我们将这个usbcamera的id也写为0,即名字为“legacy/0”,那么在ProviderInfo::parseDeviceName这里取出来的id,就会和前面的已经有了的主摄冲突。
添加camera的ProviderInfo
在frameworks\av\services\camera\libcameraservice\common\CameraProviderManager.cpp的initialize函数里,将kLegacyProviderName改成"legacy/1"
status_t CameraProviderManager::initialize(wp listener,
ServiceInteractionProxy* proxy) {
......
// See if there's a passthrough HAL, but let's not complain if there's not
addProviderLocked("legacy/1", /*expected*/ false);
return OK;
} 在hardware\interfaces\camera\provider\2.4\default\service.cpp里的main函数里,将"legacy/1"注册上来
int main()
{
ALOGI("Camera provider Service is starting.");
// The camera HAL may communicate to other vendor components via
// /dev/vndbinder
android::ProcessState::initWithDriver("/dev/vndbinder");
return defaultPassthroughServiceImplementation("legacy/1", /*maxThreads*/ 6);
} 在hardware\interfaces\camera\provider\2.4\default\CameraProvider.cpp里,将kLegacyProviderName改成"legacy/1";它会被HIDL_FETCH_ICameraProvider调用。
hw_get_module对应camera的hal代码
在hardware\interfaces\camera\provider\2.4\default\CameraProvider.cpp里的initialize()函数里,hw_get_module参数传进去的名字,改成我们usbcamera hal里指定的名字
int err = hw_get_module("usbcamera", (const hw_module_t **)&rawModule);
准备好对应的camera hal代码
我们的usbcamera hal代码,我们放在hardware\libhardware\modules\camera\libuvccamera下面。在这个目录里,有个HalModule.cpp文件,里面定义了camera_module_t的结构体,它的id就是"usbcamera", 在CameraProvider.cpp里hw_get_module时,发现这里定义的id和它要找的id一致,就会load到我们的usbcamera了。
#include
#include
#include
#include
#include
#include "Camera.h"
/******************************************************************************\
DECLARATIONS
Not used in any other project source files, header file is redundant
\******************************************************************************/
extern camera_module_t HAL_MODULE_INFO_SYM;
namespace android {
namespace HalModule {
/* Available cameras */
extern Camera *cams[];
static int getNumberOfCameras();
static int getCameraInfo(int cameraId, struct camera_info *info);
static int setCallbacks(const camera_module_callbacks_t *callbacks);
static void getVendorTagOps(vendor_tag_ops_t* ops);
static int openDevice(const hw_module_t *module, const char *name, hw_device_t **device);
static struct hw_module_methods_t moduleMethods = {
.open = openDevice
};
}; /* namespace HalModule */
}; /* namespace android */
/******************************************************************************\
DEFINITIONS
\******************************************************************************/
camera_module_t HAL_MODULE_INFO_SYM = {
.common = {
.tag = HARDWARE_MODULE_TAG,
.module_api_version = CAMERA_MODULE_API_VERSION_2_3,
.hal_api_version = HARDWARE_HAL_API_VERSION,
.id = "usbcamera",
.name = "V4l2 Camera",
.author = "Antmicro Ltd.",
.methods = &android::HalModule::moduleMethods,
.dso = NULL,
.reserved = {0}
},
.get_number_of_cameras = android::HalModule::getNumberOfCameras,
.get_camera_info = android::HalModule::getCameraInfo,
.set_callbacks = android::HalModule::setCallbacks,
};
namespace android {
namespace HalModule {
static Camera mainCamera;
Camera *cams[] = {
&mainCamera
};
static int getNumberOfCameras() {
return NELEM(cams);
};
static int getCameraInfo(int cameraId, struct camera_info *info) {
cameraId = 0;//cameraId - 1;
if(cameraId < 0 || cameraId >= getNumberOfCameras()) {
return -ENODEV;
}
if(!cams[cameraId]->isValid()) {
return -ENODEV;
}
return cams[cameraId]->cameraInfo(info);
}
int setCallbacks(const camera_module_callbacks_t * /*callbacks*/) {
ALOGI("%s: lihb setCallbacks", __FUNCTION__);
/* TODO: Implement for hotplug support */
return OK;
}
static int openDevice(const hw_module_t *module, const char *name, hw_device_t **device) {
if (module != &HAL_MODULE_INFO_SYM.common) {
return -EINVAL;
}
if (name == NULL) {
return -EINVAL;
}
errno = 0;
int cameraId = (int)strtol(name, NULL, 10);
cameraId = 0;
if(errno || cameraId < 0 || cameraId >= getNumberOfCameras()) {
return -EINVAL;
}
if(!cams[cameraId]->isValid()) {
*device = NULL;
return -ENODEV;
}
return cams[cameraId]->openDevice(device);
}
}; /* namespace HalModule */
}; /* namespace android */
大家可能会发现,在getCameraInfo函数里,我将cameraId写死成了0,但是前面我们不是刚说过,我们的usbcamera是第二个摄像头,id要为1么?其实这里的id,和前面说的那个id,不是同一个意思。在这里之所以写成0,是因为我们这套usbcamera hal代码上面,只挂了一个摄像头,这个摄像头对应的代码放在Camera *cams[]数组里,这个数组里只放了一个对象,所以id自然就要为0了。然后我们在我们的halModule.cpp里操作getCameraInfo或openDevice时,就会通过这个数组调用到static Camera mainCamera;这里定义的这个Camera对象了。这个Camera,也是我们自己写的代码:
//Camera.h
#ifndef CAMERA_H
#define CAMERA_H
#include
#include
#include
#include
#include
#include
#include "Workers.h"
#include "ImageConverter.h"
#include "DbgUtils.h"
#include
#include
#include
#include "VGA_YUV422.h"
namespace android {
class Camera: public camera3_device {
public:
Camera();
virtual ~Camera();
bool isValid() { return mValid; }
virtual status_t cameraInfo(struct camera_info *info);
virtual int openDevice(hw_device_t **device);
virtual int closeDevice();
protected:
virtual camera_metadata_t * staticCharacteristics();
virtual int initialize(const camera3_callback_ops_t *callbackOps);
virtual int configureStreams(camera3_stream_configuration_t *streamList);
virtual const camera_metadata_t * constructDefaultRequestSettings(int type);
virtual int registerStreamBuffers(const camera3_stream_buffer_set_t *bufferSet);
virtual int processCaptureRequest(camera3_capture_request_t *request);
/* HELPERS/SUBPROCEDURES */
void notifyShutter(uint32_t frameNumber, uint64_t timestamp);
void processCaptureResult(uint32_t frameNumber, const camera_metadata_t *result, const Vector &buffers);
camera_metadata_t *mStaticCharacteristics;
camera_metadata_t *mDefaultRequestSettings[CAMERA3_TEMPLATE_COUNT];
CameraMetadata mLastRequestSettings;
V4l2Device *mDev;
bool mValid;
const camera3_callback_ops_t *mCallbackOps;
size_t mJpegBufferSize;
private:
ImageConverter mConverter;
Mutex mMutex;
uint8_t* mFrameBuffer;
uint8_t* rszbuffer;
int mProperty_enableTimesTamp = -1;
/* STATIC WRAPPERS */
static int sClose(hw_device_t *device);
static int sInitialize(const struct camera3_device *device, const camera3_callback_ops_t *callback_ops);
static int sConfigureStreams(const struct camera3_device *device, camera3_stream_configuration_t *stream_list);
static int sRegisterStreamBuffers(const struct camera3_device *device, const camera3_stream_buffer_set_t *buffer_set);
static const camera_metadata_t * sConstructDefaultRequestSettings(const struct camera3_device *device, int type);
static int sProcessCaptureRequest(const struct camera3_device *device, camera3_capture_request_t *request);
static void sGetMetadataVendorTagOps(const struct camera3_device *device, vendor_tag_query_ops_t* ops);
static void sDump(const struct camera3_device *device, int fd);
static int sFlush(const struct camera3_device *device);
static void _AddTimesTamp(uint8_t* buffer, int32_t width, int32_t height);
static camera3_device_ops_t sOps;
};
}; /* namespace android */
#endif // CAMERA_H
/*
* Copyright (C) 2015-2016 Antmicro
*
* Licensed under the Apache License, Version 2.0 (the "License");
* you may not use this file except in compliance with the License.
* You may obtain a copy of the License at
*
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
* limitations under the License.
*/
#define LOG_TAG "usb-Camera"
#define LOG_NDEBUG 0
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include "DbgUtils.h"
#include "Camera.h"
#include "ImageConverter.h"
#include "libyuv.h"
//#include
#include
#include
#include
namespace android {
/**
* \class Camera
*
* Android's Camera 3 device implementation.
*
* Declaration of camera capabilities, frame request handling, etc. This code
* is what Android framework talks to.
*/
Camera::Camera()
: mStaticCharacteristics(NULL)
, mCallbackOps(NULL)
, mJpegBufferSize(0) {
ALOGI("Camera() start");
DBGUTILS_AUTOLOGCALL(__func__);
for(size_t i = 0; i < NELEM(mDefaultRequestSettings); i++) {
mDefaultRequestSettings[i] = NULL;
}
common.tag = HARDWARE_DEVICE_TAG;
common.version = CAMERA_DEVICE_API_VERSION_3_2;//CAMERA_DEVICE_API_VERSION_3_0;
common.module = &HAL_MODULE_INFO_SYM.common;
common.close = Camera::sClose;
ops = &sOps;
priv = NULL;
mValid = true;
mFrameBuffer = new uint8_t[640*480*4];
rszbuffer = new uint8_t[640*480*4];
mDev = new V4l2Device();
if(!mDev) {
mValid = false;
}
}
Camera::~Camera() {
DBGUTILS_AUTOLOGCALL(__func__);
gWorkers.stop();
mDev->disconnect();
delete[] mFrameBuffer;
delete[] rszbuffer;
delete mDev;
}
status_t Camera::cameraInfo(struct camera_info *info) {
DBGUTILS_AUTOLOGCALL(__func__);
ALOGI("Camera::cameraInfo entry");
ALOGE("Camera::cameraInfo entry");
Mutex::Autolock lock(mMutex);
info->facing = CAMERA_FACING_FRONT;//BACK;//FRONT;
info->orientation = 0;
info->device_version = CAMERA_DEVICE_API_VERSION_3_2;//CAMERA_DEVICE_API_VERSION_3_0;//CAMERA_DEVICE_API_VERSION_3_4;
info->static_camera_characteristics = staticCharacteristics();
return NO_ERROR;
}
int Camera::openDevice(hw_device_t **device) {
ALOGI("%s",__FUNCTION__);
DBGUTILS_AUTOLOGCALL(__func__);
Mutex::Autolock lock(mMutex);
char enableTimesTamp[PROPERTY_VALUE_MAX];
char enableAVI[PROPERTY_VALUE_MAX];
mDev->connect();
*device = &common;
gWorkers.start();
return NO_ERROR;
}
int Camera::closeDevice() {
ALOGI("%s",__FUNCTION__);
DBGUTILS_AUTOLOGCALL(__func__);
Mutex::Autolock lock(mMutex);
gWorkers.stop();
mDev->disconnect();
return NO_ERROR;
}
camera_metadata_t *Camera::staticCharacteristics() {
if(mStaticCharacteristics)
return mStaticCharacteristics;
CameraMetadata cm;
auto &resolutions = mDev->availableResolutions();
auto &previewResolutions = resolutions;
auto sensorRes = mDev->sensorResolution();
/***********************************\
|* START OF CAMERA CHARACTERISTICS *|
\***********************************/
/* fake, but valid aspect ratio */
const float sensorInfoPhysicalSize[] = {
5.0f,
5.0f * (float)sensorRes.height / (float)sensorRes.width
};
cm.update(ANDROID_SENSOR_INFO_PHYSICAL_SIZE, sensorInfoPhysicalSize, NELEM(sensorInfoPhysicalSize));
/* fake */
static const float lensInfoAvailableFocalLengths[] = {3.30f};
cm.update(ANDROID_LENS_INFO_AVAILABLE_FOCAL_LENGTHS, lensInfoAvailableFocalLengths, NELEM(lensInfoAvailableFocalLengths));
static const uint8_t lensFacing = ANDROID_LENS_FACING_FRONT;
cm.update(ANDROID_LENS_FACING, &lensFacing, 1);
const int32_t sensorInfoPixelArraySize[] = {
(int32_t)sensorRes.width,
(int32_t)sensorRes.height
};
cm.update(ANDROID_SENSOR_INFO_PIXEL_ARRAY_SIZE, sensorInfoPixelArraySize, NELEM(sensorInfoPixelArraySize));
const int32_t sensorInfoActiveArraySize[] = {
0, 0,
(int32_t)sensorRes.width, (int32_t)sensorRes.height
};
cm.update(ANDROID_SENSOR_INFO_ACTIVE_ARRAY_SIZE, sensorInfoActiveArraySize, NELEM(sensorInfoActiveArraySize));
static const int32_t scalerAvailableFormats[] = {
HAL_PIXEL_FORMAT_RGBA_8888, //预览流
HAL_PIXEL_FORMAT_IMPLEMENTATION_DEFINED,//预览流
/* Non-preview one, must be last - see following code */
HAL_PIXEL_FORMAT_BLOB//拍照流
};
cm.update(ANDROID_SCALER_AVAILABLE_FORMATS, scalerAvailableFormats, NELEM(scalerAvailableFormats));
/* Only for HAL_PIXEL_FORMAT_BLOB */
const size_t mainStreamConfigsCount = resolutions.size();
/* For all other supported pixel formats */
const size_t previewStreamConfigsCount = previewResolutions.size() * (NELEM(scalerAvailableFormats) - 1);
const size_t streamConfigsCount = mainStreamConfigsCount + previewStreamConfigsCount;
int32_t scalerAvailableStreamConfigurations[streamConfigsCount * 4];
int64_t scalerAvailableMinFrameDurations[streamConfigsCount * 4];
int32_t scalerAvailableProcessedSizes[previewResolutions.size() * 2];
int64_t scalerAvailableProcessedMinDurations[previewResolutions.size()];
int32_t scalerAvailableJpegSizes[resolutions.size() * 2];
int64_t scalerAvailableJpegMinDurations[resolutions.size()];
size_t i4 = 0;
size_t i2 = 0;
size_t i1 = 0;
/* Main stream configurations */
for(size_t resId = 0; resId < resolutions.size(); ++resId) {
scalerAvailableStreamConfigurations[i4 + 0] = HAL_PIXEL_FORMAT_BLOB;
scalerAvailableStreamConfigurations[i4 + 1] = (int32_t)resolutions[resId].width;
scalerAvailableStreamConfigurations[i4 + 2] = (int32_t)resolutions[resId].height;
scalerAvailableStreamConfigurations[i4 + 3] = ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS_OUTPUT;
scalerAvailableMinFrameDurations[i4 + 0] = HAL_PIXEL_FORMAT_BLOB;
scalerAvailableMinFrameDurations[i4 + 1] = (int32_t)resolutions[resId].width;
scalerAvailableMinFrameDurations[i4 + 2] = (int32_t)resolutions[resId].height;
scalerAvailableMinFrameDurations[i4 + 3] = 1000000000 / 30; /* TODO: read from the device */
scalerAvailableJpegSizes[i2 + 0] = (int32_t)resolutions[resId].width;
scalerAvailableJpegSizes[i2 + 1] = (int32_t)resolutions[resId].height;
scalerAvailableJpegMinDurations[i1] = 1000000000 / 30; /* TODO: read from the device */
i4 += 4;
i2 += 2;
i1 += 1;
}
i2 = 0;
i1 = 0;
/* Preview stream configurations */
for(size_t resId = 0; resId < previewResolutions.size(); ++resId) {
for(size_t fmtId = 0; fmtId < NELEM(scalerAvailableFormats) - 1; ++fmtId) {
scalerAvailableStreamConfigurations[i4 + 0] = scalerAvailableFormats[fmtId];
scalerAvailableStreamConfigurations[i4 + 1] = (int32_t)previewResolutions[resId].width;
scalerAvailableStreamConfigurations[i4 + 2] = (int32_t)previewResolutions[resId].height;
scalerAvailableStreamConfigurations[i4 + 3] = ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS_OUTPUT;
scalerAvailableMinFrameDurations[i4 + 0] = scalerAvailableFormats[fmtId];
scalerAvailableMinFrameDurations[i4 + 1] = (int32_t)previewResolutions[resId].width;
scalerAvailableMinFrameDurations[i4 + 2] = (int32_t)previewResolutions[resId].height;
scalerAvailableMinFrameDurations[i4 + 3] = 1000000000 / 10; /* TODO: read from the device */
i4 += 4;
}
scalerAvailableProcessedSizes[i2 + 0] = (int32_t)previewResolutions[resId].width;
scalerAvailableProcessedSizes[i2 + 1] = (int32_t)previewResolutions[resId].height;
scalerAvailableProcessedMinDurations[i1] = 1000000000 / 10; /* TODO: read from the device */
i2 += 2;
i1 += 1;
}
cm.update(ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS, scalerAvailableStreamConfigurations, (size_t)NELEM(scalerAvailableStreamConfigurations));
cm.update(ANDROID_SCALER_AVAILABLE_MIN_FRAME_DURATIONS, scalerAvailableMinFrameDurations, (size_t)NELEM(scalerAvailableMinFrameDurations));
/* Probably fake */
cm.update(ANDROID_SCALER_AVAILABLE_STALL_DURATIONS, scalerAvailableMinFrameDurations, (size_t)NELEM(scalerAvailableMinFrameDurations));
cm.update(ANDROID_SCALER_AVAILABLE_JPEG_SIZES, scalerAvailableJpegSizes, (size_t)NELEM(scalerAvailableJpegSizes));
cm.update(ANDROID_SCALER_AVAILABLE_JPEG_MIN_DURATIONS, scalerAvailableJpegMinDurations, (size_t)NELEM(scalerAvailableJpegMinDurations));
cm.update(ANDROID_SCALER_AVAILABLE_PROCESSED_SIZES, scalerAvailableProcessedSizes, (size_t)NELEM(scalerAvailableProcessedSizes));
cm.update(ANDROID_SCALER_AVAILABLE_PROCESSED_MIN_DURATIONS, scalerAvailableProcessedMinDurations, (size_t)NELEM(scalerAvailableProcessedMinDurations));
//添加capabilities集,否则api2的接口,在调用getStreamConfigurationMap去获取REQUEST_AVAILABLE_CAPABILITIES值时会失败。
Vector available_capabilities;
available_capabilities.add(ANDROID_REQUEST_AVAILABLE_CAPABILITIES_READ_SENSOR_SETTINGS);
available_capabilities.add(ANDROID_REQUEST_AVAILABLE_CAPABILITIES_PRIVATE_REPROCESSING);
available_capabilities.add(ANDROID_REQUEST_AVAILABLE_CAPABILITIES_YUV_REPROCESSING);
cm.update(ANDROID_REQUEST_AVAILABLE_CAPABILITIES,
available_capabilities.array(),
available_capabilities.size());
/* ~8.25 bit/px (https://en.wikipedia.org/wiki/JPEG#Sample_photographs) */
/* Use 9 bit/px, add buffer info struct size, round up to page size */
mJpegBufferSize = sensorRes.width * sensorRes.height * 9 + sizeof(camera3_jpeg_blob);
mJpegBufferSize = (mJpegBufferSize + PAGE_SIZE - 1u) & ~(PAGE_SIZE - 1u);
const int32_t jpegMaxSize = (int32_t)mJpegBufferSize;
cm.update(ANDROID_JPEG_MAX_SIZE, &jpegMaxSize, 1);
static const int32_t jpegAvailableThumbnailSizes[] = {
0, 0,
320, 240
};
cm.update(ANDROID_JPEG_AVAILABLE_THUMBNAIL_SIZES, jpegAvailableThumbnailSizes, NELEM(jpegAvailableThumbnailSizes));
static const int32_t sensorOrientation = 90;
cm.update(ANDROID_SENSOR_ORIENTATION, &sensorOrientation, 1);
static const uint8_t flashInfoAvailable = ANDROID_FLASH_INFO_AVAILABLE_FALSE;
cm.update(ANDROID_FLASH_INFO_AVAILABLE, &flashInfoAvailable, 1);
static const float scalerAvailableMaxDigitalZoom = 1;
cm.update(ANDROID_SCALER_AVAILABLE_MAX_DIGITAL_ZOOM, &scalerAvailableMaxDigitalZoom, 1);
static const uint8_t statisticsFaceDetectModes[] = {
ANDROID_STATISTICS_FACE_DETECT_MODE_OFF
};
cm.update(ANDROID_STATISTICS_FACE_DETECT_MODE, statisticsFaceDetectModes, NELEM(statisticsFaceDetectModes));
static const int32_t statisticsInfoMaxFaceCount = 0;
cm.update(ANDROID_STATISTICS_INFO_MAX_FACE_COUNT, &statisticsInfoMaxFaceCount, 1);
static const uint8_t controlAvailableSceneModes[] = {
ANDROID_CONTROL_SCENE_MODE_DISABLED
};
cm.update(ANDROID_CONTROL_AVAILABLE_SCENE_MODES, controlAvailableSceneModes, NELEM(controlAvailableSceneModes));
static const uint8_t controlAvailableEffects[] = {
ANDROID_CONTROL_EFFECT_MODE_OFF
};
cm.update(ANDROID_CONTROL_AVAILABLE_EFFECTS, controlAvailableEffects, NELEM(controlAvailableEffects));
static const int32_t controlMaxRegions[] = {
0, /* AE */
0, /* AWB */
0 /* AF */
};
cm.update(ANDROID_CONTROL_MAX_REGIONS, controlMaxRegions, NELEM(controlMaxRegions));
static const uint8_t controlAeAvailableModes[] = {
ANDROID_CONTROL_AE_MODE_OFF
};
cm.update(ANDROID_CONTROL_AE_AVAILABLE_MODES, controlAeAvailableModes, NELEM(controlAeAvailableModes));
static const camera_metadata_rational controlAeCompensationStep = {1, 3};
cm.update(ANDROID_CONTROL_AE_COMPENSATION_STEP, &controlAeCompensationStep, 1);
int32_t controlAeCompensationRange[] = {-9, 9};
cm.update(ANDROID_CONTROL_AE_COMPENSATION_RANGE, controlAeCompensationRange, NELEM(controlAeCompensationRange));
static const int32_t controlAeAvailableTargetFpsRanges[] = {
10, 20
};
cm.update(ANDROID_CONTROL_AE_AVAILABLE_TARGET_FPS_RANGES, controlAeAvailableTargetFpsRanges, NELEM(controlAeAvailableTargetFpsRanges));
static const uint8_t controlAeAvailableAntibandingModes[] = {
ANDROID_CONTROL_AE_ANTIBANDING_MODE_OFF
};
cm.update(ANDROID_CONTROL_AE_AVAILABLE_ANTIBANDING_MODES, controlAeAvailableAntibandingModes, NELEM(controlAeAvailableAntibandingModes));
static const uint8_t controlAwbAvailableModes[] = {
ANDROID_CONTROL_AWB_MODE_AUTO,
ANDROID_CONTROL_AWB_MODE_OFF
};
cm.update(ANDROID_CONTROL_AWB_AVAILABLE_MODES, controlAwbAvailableModes, NELEM(controlAwbAvailableModes));
static const uint8_t controlAfAvailableModes[] = {
ANDROID_CONTROL_AF_MODE_OFF
};
cm.update(ANDROID_CONTROL_AF_AVAILABLE_MODES, controlAfAvailableModes, NELEM(controlAfAvailableModes));
static const uint8_t controlAvailableVideoStabilizationModes[] = {
ANDROID_CONTROL_VIDEO_STABILIZATION_MODE_OFF
};
cm.update(ANDROID_CONTROL_AVAILABLE_VIDEO_STABILIZATION_MODES, controlAvailableVideoStabilizationModes, NELEM(controlAvailableVideoStabilizationModes));
const uint8_t infoSupportedHardwareLevel = ANDROID_INFO_SUPPORTED_HARDWARE_LEVEL_LIMITED;
cm.update(ANDROID_INFO_SUPPORTED_HARDWARE_LEVEL, &infoSupportedHardwareLevel, 1);
/***********************************\
|* END OF CAMERA CHARACTERISTICS *|
\***********************************/
mStaticCharacteristics = cm.release();
return mStaticCharacteristics;
}
int Camera::initialize(const camera3_callback_ops_t *callbackOps) {
DBGUTILS_AUTOLOGCALL(__func__);
Mutex::Autolock lock(mMutex);
mCallbackOps = callbackOps;
return NO_ERROR;
}
const camera_metadata_t * Camera::constructDefaultRequestSettings(int type) {
DBGUTILS_AUTOLOGCALL(__func__);
Mutex::Autolock lock(mMutex);
/* TODO: validate type */
if(mDefaultRequestSettings[type]) {
return mDefaultRequestSettings[type];
}
CameraMetadata cm;
static const int32_t requestId = 0;
cm.update(ANDROID_REQUEST_ID, &requestId, 1);
static const float lensFocusDistance = 0.0f;
cm.update(ANDROID_LENS_FOCUS_DISTANCE, &lensFocusDistance, 1);
auto sensorSize = mDev->sensorResolution();
const int32_t scalerCropRegion[] = {
0, 0,
(int32_t)sensorSize.width, (int32_t)sensorSize.height
};
cm.update(ANDROID_SCALER_CROP_REGION, scalerCropRegion, NELEM(scalerCropRegion));
static const int32_t jpegThumbnailSize[] = {
0, 0
};
cm.update(ANDROID_JPEG_THUMBNAIL_SIZE, jpegThumbnailSize, NELEM(jpegThumbnailSize));
static const uint8_t jpegThumbnailQuality = 50;
cm.update(ANDROID_JPEG_THUMBNAIL_QUALITY, &jpegThumbnailQuality, 1);
static const double jpegGpsCoordinates[] = {
0, 0
};
cm.update(ANDROID_JPEG_GPS_COORDINATES, jpegGpsCoordinates, NELEM(jpegGpsCoordinates));
static const uint8_t jpegGpsProcessingMethod[32] = "None";
cm.update(ANDROID_JPEG_GPS_PROCESSING_METHOD, jpegGpsProcessingMethod, NELEM(jpegGpsProcessingMethod));
static const int64_t jpegGpsTimestamp = 0;
cm.update(ANDROID_JPEG_GPS_TIMESTAMP, &jpegGpsTimestamp, 1);
static const int32_t jpegOrientation = 0;
cm.update(ANDROID_JPEG_ORIENTATION, &jpegOrientation, 1);
/** android.stats */
static const uint8_t statisticsFaceDetectMode = ANDROID_STATISTICS_FACE_DETECT_MODE_OFF;
cm.update(ANDROID_STATISTICS_FACE_DETECT_MODE, &statisticsFaceDetectMode, 1);
static const uint8_t statisticsHistogramMode = ANDROID_STATISTICS_HISTOGRAM_MODE_OFF;
cm.update(ANDROID_STATISTICS_HISTOGRAM_MODE, &statisticsHistogramMode, 1);
static const uint8_t statisticsSharpnessMapMode = ANDROID_STATISTICS_SHARPNESS_MAP_MODE_OFF;
cm.update(ANDROID_STATISTICS_SHARPNESS_MAP_MODE, &statisticsSharpnessMapMode, 1);
uint8_t controlCaptureIntent = 0;
switch (type) {
case CAMERA3_TEMPLATE_PREVIEW: controlCaptureIntent = ANDROID_CONTROL_CAPTURE_INTENT_PREVIEW; break;
case CAMERA3_TEMPLATE_STILL_CAPTURE: controlCaptureIntent = ANDROID_CONTROL_CAPTURE_INTENT_STILL_CAPTURE; break;
case CAMERA3_TEMPLATE_VIDEO_RECORD: controlCaptureIntent = ANDROID_CONTROL_CAPTURE_INTENT_VIDEO_RECORD; break;
case CAMERA3_TEMPLATE_VIDEO_SNAPSHOT: controlCaptureIntent = ANDROID_CONTROL_CAPTURE_INTENT_VIDEO_SNAPSHOT; break;
case CAMERA3_TEMPLATE_ZERO_SHUTTER_LAG: controlCaptureIntent = ANDROID_CONTROL_CAPTURE_INTENT_ZERO_SHUTTER_LAG; break;
default: controlCaptureIntent = ANDROID_CONTROL_CAPTURE_INTENT_CUSTOM; break;
}
cm.update(ANDROID_CONTROL_CAPTURE_INTENT, &controlCaptureIntent, 1);
static const uint8_t controlMode = ANDROID_CONTROL_MODE_OFF;
cm.update(ANDROID_CONTROL_MODE, &controlMode, 1);
static const uint8_t controlEffectMode = ANDROID_CONTROL_EFFECT_MODE_OFF;
cm.update(ANDROID_CONTROL_EFFECT_MODE, &controlEffectMode, 1);
static const uint8_t controlSceneMode = ANDROID_CONTROL_SCENE_MODE_FACE_PRIORITY;
cm.update(ANDROID_CONTROL_SCENE_MODE, &controlSceneMode, 1);
static const uint8_t controlAeMode = ANDROID_CONTROL_AE_MODE_OFF;
cm.update(ANDROID_CONTROL_AE_MODE, &controlAeMode, 1);
static const uint8_t controlAeLock = ANDROID_CONTROL_AE_LOCK_OFF;
cm.update(ANDROID_CONTROL_AE_LOCK, &controlAeLock, 1);
static const int32_t controlAeRegions[] = {
0, 0,
(int32_t)sensorSize.width, (int32_t)sensorSize.height,
1000
};
cm.update(ANDROID_CONTROL_AE_REGIONS, controlAeRegions, NELEM(controlAeRegions));
cm.update(ANDROID_CONTROL_AWB_REGIONS, controlAeRegions, NELEM(controlAeRegions));
cm.update(ANDROID_CONTROL_AF_REGIONS, controlAeRegions, NELEM(controlAeRegions));
static const int32_t controlAeExposureCompensation = 0;
cm.update(ANDROID_CONTROL_AE_EXPOSURE_COMPENSATION, &controlAeExposureCompensation, 1);
static const int32_t controlAeTargetFpsRange[] = {
10, 20
};
cm.update(ANDROID_CONTROL_AE_TARGET_FPS_RANGE, controlAeTargetFpsRange, NELEM(controlAeTargetFpsRange));
static const uint8_t controlAeAntibandingMode = ANDROID_CONTROL_AE_ANTIBANDING_MODE_OFF;
cm.update(ANDROID_CONTROL_AE_ANTIBANDING_MODE, &controlAeAntibandingMode, 1);
static const uint8_t controlAwbMode = ANDROID_CONTROL_AWB_MODE_OFF;
cm.update(ANDROID_CONTROL_AWB_MODE, &controlAwbMode, 1);
static const uint8_t controlAwbLock = ANDROID_CONTROL_AWB_LOCK_OFF;
cm.update(ANDROID_CONTROL_AWB_LOCK, &controlAwbLock, 1);
uint8_t controlAfMode = ANDROID_CONTROL_AF_MODE_OFF;
cm.update(ANDROID_CONTROL_AF_MODE, &controlAfMode, 1);
static const uint8_t controlAeState = ANDROID_CONTROL_AE_STATE_CONVERGED;
cm.update(ANDROID_CONTROL_AE_STATE, &controlAeState, 1);
static const uint8_t controlAfState = ANDROID_CONTROL_AF_STATE_INACTIVE;
cm.update(ANDROID_CONTROL_AF_STATE, &controlAfState, 1);
static const uint8_t controlAwbState = ANDROID_CONTROL_AWB_STATE_INACTIVE;
cm.update(ANDROID_CONTROL_AWB_STATE, &controlAwbState, 1);
static const uint8_t controlVideoStabilizationMode = ANDROID_CONTROL_VIDEO_STABILIZATION_MODE_OFF;
cm.update(ANDROID_CONTROL_VIDEO_STABILIZATION_MODE, &controlVideoStabilizationMode, 1);
static const int32_t controlAePrecaptureId = ANDROID_CONTROL_AE_PRECAPTURE_TRIGGER_IDLE;
cm.update(ANDROID_CONTROL_AE_PRECAPTURE_ID, &controlAePrecaptureId, 1);
static const int32_t controlAfTriggerId = 0;
cm.update(ANDROID_CONTROL_AF_TRIGGER_ID, &controlAfTriggerId, 1);
mDefaultRequestSettings[type] = cm.release();
return mDefaultRequestSettings[type];
}
int Camera::configureStreams(camera3_stream_configuration_t *streamList) {
DBGUTILS_AUTOLOGCALL(__func__);
Mutex::Autolock lock(mMutex);
ALOGI("configureStreams");
/* TODO: sanity checks */
ALOGI("+-------------------------------------------------------------------------------");
ALOGI("| STREAMS FROM FRAMEWORK");
ALOGI("+-------------------------------------------------------------------------------");
for(size_t i = 0; i < streamList->num_streams; ++i) {
camera3_stream_t *newStream = streamList->streams[i];
ALOGI("| p=%p fmt=0x%.2x type=%u usage=0x%.8x size=%4ux%-4u buf_no=%u",
newStream,
newStream->format,
newStream->stream_type,
newStream->usage,
newStream->width,
newStream->height,
newStream->max_buffers);
}
ALOGI("+-------------------------------------------------------------------------------");
/* TODO: do we need input stream? */
camera3_stream_t *inStream = NULL;
unsigned width = 0;
unsigned height = 0;
for(size_t i = 0; i < streamList->num_streams; ++i) {
camera3_stream_t *newStream = streamList->streams[i];
/* TODO: validate: null */
if(newStream->stream_type == CAMERA3_STREAM_INPUT || newStream->stream_type == CAMERA3_STREAM_BIDIRECTIONAL) {
if(inStream) {
ALOGI("Only one input/bidirectional stream allowed (previous is %p, this %p)", inStream, newStream);
return BAD_VALUE;
}
inStream = newStream;
}
/* TODO: validate format */
if(newStream->format == HAL_PIXEL_FORMAT_IMPLEMENTATION_DEFINED) {
newStream->format = HAL_PIXEL_FORMAT_RGBA_8888;
}
/* TODO: support ZSL */
if(newStream->usage & GRALLOC_USAGE_HW_CAMERA_ZSL) {
ALOGI("ZSL STREAM FOUND! It is not supported for now.");
ALOGI(" Disable it by placing following line in /system/build.prop:");
ALOGI(" camera.disable_zsl_mode=1");
return BAD_VALUE;
}
switch(newStream->stream_type) {
case CAMERA3_STREAM_OUTPUT: newStream->usage = GRALLOC_USAGE_SW_WRITE_OFTEN; break;
case CAMERA3_STREAM_INPUT: newStream->usage = GRALLOC_USAGE_SW_READ_OFTEN; break;
case CAMERA3_STREAM_BIDIRECTIONAL: newStream->usage = GRALLOC_USAGE_SW_WRITE_OFTEN | GRALLOC_USAGE_SW_READ_OFTEN; break;
}
newStream->max_buffers = 1; /* TODO: support larger queue */
if(newStream->width * newStream->height > width * height) {
width = newStream->width;
height = newStream->height;
}
/* TODO: store stream pointers somewhere and configure only new ones */
}
if(mDev->isNeedsetResolution(width, height))
{
if(mDev->isStreaming())
{
if (!mDev->setStreaming(false))
{
ALOGI("Could not stop streaming");
return NO_INIT;
}
}
if (!mDev->setResolution(width, height))
{
ALOGI("Could not set resolution");
return NO_INIT;
}
}
ALOGI("+-------------------------------------------------------------------------------");
ALOGI("| STREAMS AFTER CHANGES");
ALOGI("+-------------------------------------------------------------------------------");
for(size_t i = 0; i < streamList->num_streams; ++i) {
const camera3_stream_t *newStream = streamList->streams[i];
ALOGI("| p=%p fmt=0x%.2x type=%u usage=0x%.8x size=%4ux%-4u buf_no=%u",
newStream,
newStream->format,
newStream->stream_type,
newStream->usage,
newStream->width,
newStream->height,
newStream->max_buffers);
}
ALOGI("+-------------------------------------------------------------------------------");
if(!mDev->setStreaming(true)) {
ALOGI("Could not start streaming");
return NO_INIT;
}
return NO_ERROR;
}
int Camera::registerStreamBuffers(const camera3_stream_buffer_set_t *bufferSet) {
DBGUTILS_AUTOLOGCALL(__func__);
Mutex::Autolock lock(mMutex);
ALOGI("+-------------------------------------------------------------------------------");
ALOGI("| BUFFERS FOR STREAM %p", bufferSet->stream);
ALOGI("+-------------------------------------------------------------------------------");
for (size_t i = 0; i < bufferSet->num_buffers; ++i) {
ALOGI("| p=%p", bufferSet->buffers[i]);
}
ALOGI("+-------------------------------------------------------------------------------");
return OK;
}
int Camera::processCaptureRequest(camera3_capture_request_t *request) {
assert(request != NULL);
Mutex::Autolock lock(mMutex);
BENCHMARK_HERE(120);
FPSCOUNTER_HERE(120);
CameraMetadata cm;
const V4l2Device::VBuffer *frame = NULL;
auto res = mDev->resolution();
status_t e;
Vector buffers;
auto timestamp = systemTime();
if(request->settings == NULL && mLastRequestSettings.isEmpty()) {
ALOGI("processCaptureRequest error 1, First request does not have metadata, BAD_VALUE is %d", BAD_VALUE);
return BAD_VALUE;
}
if(request->input_buffer) {
/* Ignore input buffer */
/* TODO: do we expect any input buffer? */
request->input_buffer->release_fence = -1;
}
if(!request->settings) {
cm.acquire(mLastRequestSettings);
} else {
cm = request->settings;
}
notifyShutter(request->frame_number, (uint64_t)timestamp);
BENCHMARK_SECTION("Lock/Read") {
frame = mDev->readLock();
}
if(!frame) {
ALOGI("processCaptureRequest error 2, NOT_ENOUGH_DATA is %d", NOT_ENOUGH_DATA);
return NOT_ENOUGH_DATA;
}
buffers.setCapacity(request->num_output_buffers);
uint8_t *rgbaBuffer = NULL;
char aviRecordering[PROPERTY_VALUE_MAX];
for(size_t i = 0; i < request->num_output_buffers; ++i) {
const camera3_stream_buffer &srcBuf = request->output_buffers[i];
uint8_t *buf = NULL;
sp acquireFence = new Fence(srcBuf.acquire_fence);
e = acquireFence->wait(1500); /* FIXME: magic number */
if(e == TIMED_OUT) {
ALOGI("processCaptureRequest buffer %p frame %-4u Wait on acquire fence timed out", srcBuf.buffer, request->frame_number);
}
if(e == NO_ERROR) {
const Rect rect((int)srcBuf.stream->width, (int)srcBuf.stream->height);
e = GraphicBufferMapper::get().lock(*srcBuf.buffer, GRALLOC_USAGE_SW_WRITE_OFTEN, rect, (void **)&buf);
if(e != NO_ERROR) {
ALOGI("processCaptureRequest buffer %p frame %-4u lock failed", srcBuf.buffer, request->frame_number);
}
}
if(e != NO_ERROR) {
ALOGI("processCaptureRequest error 3, e is %d, errno is %d, acquire_fence is %d", e, errno, srcBuf.acquire_fence);
do GraphicBufferMapper::get().unlock(*request->output_buffers[i].buffer); while(i--);
return NO_INIT;
}
switch(srcBuf.stream->format) {
case HAL_PIXEL_FORMAT_RGBA_8888: {
if(!rgbaBuffer) {
BENCHMARK_SECTION("YUV->RGBA") {
/* FIXME: better format detection */
if(frame->pixFmt == V4L2_PIX_FMT_YUYV) {
//mConverter.UYVYToRGBA(frame->buf, buf, res.width, res.height);
libyuv::YUY2ToI422(frame->buf, res.width*2,
mFrameBuffer, res.width,
&mFrameBuffer[res.width*res.height], res.width / 2,
&mFrameBuffer[res.width*res.height + res.width*res.height / 2], res.width / 2,
res.width, res.height);
_AddTimesTamp(mFrameBuffer, res.width, res.height);
libyuv::I422ToABGR(mFrameBuffer, res.width,
&mFrameBuffer[res.width*res.height], res.width / 2,
&mFrameBuffer[res.width*res.height + res.width*res.height / 2], res.width / 2,
buf,res.width*4,
res.width, res.height);
} else if (frame->pixFmt == V4L2_PIX_FMT_MJPEG) {
libyuv::MJPGToI420(frame->buf, frame->len,
rszbuffer, res.width,
&rszbuffer[res.width * res.height], res.width / 2 ,
&rszbuffer[res.width * res.height * 5 / 4 ], res.width / 2 ,
res.width, res.height,
res.width, res.height);
_AddTimesTamp(rszbuffer, res.width, res.height);
libyuv::I420ToABGR(rszbuffer, res.width,
&rszbuffer[res.width * res.height], res.width / 2 ,
&rszbuffer[res.width * res.height * 5 / 4 ], res.width / 2 ,
buf, res.width*4,
res.width, res.height);
// ALOGI("%s, MJPG convert done!", __FUNCTION__);
} else {
;//mConverter.YUY2ToRGBA(frame->buf, buf, res.width, res.height);
}
rgbaBuffer = buf;
}
} else {
BENCHMARK_SECTION("Buf Copy") {
memcpy(buf, rgbaBuffer, srcBuf.stream->width * srcBuf.stream->height * 4);
}
}
break;
}
case HAL_PIXEL_FORMAT_BLOB: {
BENCHMARK_SECTION("YUV->JPEG") {
const size_t maxImageSize = mJpegBufferSize - sizeof(camera3_jpeg_blob);
uint8_t jpegQuality = 95;
if(cm.exists(ANDROID_JPEG_QUALITY)) {
jpegQuality = *cm.find(ANDROID_JPEG_QUALITY).data.u8;
}
ALOGI("JPEG quality = %u", jpegQuality);
/* FIXME: better format detection */
uint8_t *bufEnd = NULL;
if(frame->pixFmt == V4L2_PIX_FMT_UYVY)
{
ALOGI("processCaptureRequest HAL_PIXEL_FORMAT_BLOB frame->pixFmt == V4L2_PIX_FMT_UYVY");
// bufEnd = mConverter.UYVYToJPEG(frame->buf, buf, res.width, res.height, maxImageSize, jpegQuality);
}
else if (frame->pixFmt == V4L2_PIX_FMT_MJPEG) {
ALOGI("processCaptureRequest HAL_PIXEL_FORMAT_BLOB frame->pixFmt == V4L2_PIX_FMT_MJPEG");
int count = frame->len / mPageSize;
int mod = frame->len % mPageSize;
uint8_t *destbuf = buf;
uint8_t * srcBuf = frame->buf;
for(int i=0; ibuf, frame->len);
bufEnd = buf + frame->len;
} else
{
ALOGI("processCaptureRequest HAL_PIXEL_FORMAT_BLOB YUY2ToJPEG");
// bufEnd = mConverter.YUY2ToJPEG(frame->buf, buf, res.width, res.height, maxImageSize, jpegQuality);
}
if(bufEnd != buf) {
camera3_jpeg_blob *jpegBlob = reinterpret_cast(buf + maxImageSize);
jpegBlob->jpeg_blob_id = CAMERA3_JPEG_BLOB_ID;
jpegBlob->jpeg_size = (uint32_t)(bufEnd - buf);
} else {
ALOGI("%s: JPEG image too big!", __FUNCTION__);
}
}
break;
}
default:
ALOGI("Unknown pixel format %d in buffer %p (stream %p), ignoring", srcBuf.stream->format, srcBuf.buffer, srcBuf.stream);
}
}
/* Unlocking all buffers in separate loop allows to copy data from already processed buffer to not yet processed one */
for(size_t i = 0; i < request->num_output_buffers; ++i) {
const camera3_stream_buffer &srcBuf = request->output_buffers[i];
GraphicBufferMapper::get().unlock(*srcBuf.buffer);
buffers.push_back(srcBuf);
buffers.editTop().acquire_fence = -1;
buffers.editTop().release_fence = -1;
buffers.editTop().status = CAMERA3_BUFFER_STATUS_OK;
}
BENCHMARK_SECTION("Unlock") {
mDev->unlock(frame);
}
int64_t sensorTimestamp = timestamp;
int64_t syncFrameNumber = request->frame_number;
cm.update(ANDROID_SENSOR_TIMESTAMP, &sensorTimestamp, 1);
cm.update(ANDROID_SYNC_FRAME_NUMBER, &syncFrameNumber, 1);
auto result = cm.getAndLock();
processCaptureResult(request->frame_number, result, buffers);
cm.unlock(result);
// Cache the settings for next time
mLastRequestSettings.acquire(cm);
/* Print stats */
char bmOut[1024];
BENCHMARK_STRING(bmOut, sizeof(bmOut), 6);
// ALOGI(" time (avg): %s", bmOut);
// ALOGI("processCaptureRequest no error");
return NO_ERROR;
}
inline void Camera::notifyShutter(uint32_t frameNumber, uint64_t timestamp) {
camera3_notify_msg_t msg;
msg.type = CAMERA3_MSG_SHUTTER;
msg.message.shutter.frame_number = frameNumber;
msg.message.shutter.timestamp = timestamp;
mCallbackOps->notify(mCallbackOps, &msg);
}
void Camera::processCaptureResult(uint32_t frameNumber, const camera_metadata_t *result, const Vector &buffers) {
camera3_capture_result captureResult;
captureResult.frame_number = frameNumber;
captureResult.result = result;
captureResult.num_output_buffers = buffers.size();
captureResult.output_buffers = buffers.array();
captureResult.input_buffer = NULL;
captureResult.partial_result = 0;
mCallbackOps->process_capture_result(mCallbackOps, &captureResult);
}
/******************************************************************************\
STATIC WRAPPERS
\******************************************************************************/
int Camera::sClose(hw_device_t *device) {
/* TODO: check device module */
Camera *thiz = static_cast(reinterpret_cast(device));
return thiz->closeDevice();
}
int Camera::sInitialize(const camera3_device *device, const camera3_callback_ops_t *callback_ops) {
/* TODO: check pointers */
Camera *thiz = static_cast(const_cast(device));
return thiz->initialize(callback_ops);
}
int Camera::sConfigureStreams(const camera3_device *device, camera3_stream_configuration_t *stream_list) {
/* TODO: check pointers */
Camera *thiz = static_cast(const_cast(device));
return thiz->configureStreams(stream_list);
}
int Camera::sRegisterStreamBuffers(const camera3_device *device, const camera3_stream_buffer_set_t *buffer_set) {
/* TODO: check pointers */
Camera *thiz = static_cast(const_cast(device));
return thiz->registerStreamBuffers(buffer_set);
}
const camera_metadata_t * Camera::sConstructDefaultRequestSettings(const camera3_device *device, int type) {
/* TODO: check pointers */
Camera *thiz = static_cast(const_cast(device));
return thiz->constructDefaultRequestSettings(type);
}
int Camera::sProcessCaptureRequest(const camera3_device *device, camera3_capture_request_t *request) {
/* TODO: check pointers */
Camera *thiz = static_cast(const_cast(device));
return thiz->processCaptureRequest(request);
}
void Camera::sGetMetadataVendorTagOps(const camera3_device *device, vendor_tag_query_ops_t *ops) {
/* TODO: implement */
}
void Camera::sDump(const camera3_device *device, int fd) {
/* TODO: implement */
}
int Camera::sFlush(const camera3_device *device) {
/* TODO: implement */
return NO_ERROR;//-ENODEV;
}
camera3_device_ops_t Camera::sOps = {
.initialize = Camera::sInitialize,
.configure_streams = Camera::sConfigureStreams,
.register_stream_buffers = Camera::sRegisterStreamBuffers,
.construct_default_request_settings = Camera::sConstructDefaultRequestSettings,
.process_capture_request = Camera::sProcessCaptureRequest,
.get_metadata_vendor_tag_ops = Camera::sGetMetadataVendorTagOps,
.dump = Camera::sDump,
.flush = Camera::sFlush,
.reserved = {0}
};
}; /* namespace android */
大家请注意,在Camera.cpp的Camera()里调用了common.version = CAMERA_DEVICE_API_VERSION_3_2; 在cameraInfo里调用了info->device_version = CAMERA_DEVICE_API_VERSION_3_2; 这里表示,我们的hal的版本定义为了hal3.2。
我们的HalModule.cpp的get_camera_info指向了HalModule::getCameraInfo, getCameraInfo里又调用到了Camera::cameraInfo,然后Camera::cameraInfo通过staticCharacteristics来,获取我们usbcamera的属性。这样在app上就可以通过getCameraInfo来获取我们usbcamera的属性了。也可以使用下面的方法来获取我们预览或者拍尺寸等:
public List getSupportedPreviewSizes() {
StreamConfigurationMap configMap;
CameraCharacteristics mCameraCharacteristics;
try {
configMap = mCameraCharacteristics.get(
CameraCharacteristics.SCALER_STREAM_CONFIGURATION_MAP);
} catch (Exception ex) {
return new ArrayList<>(0);
}
ArrayList supportedPictureSizes = new ArrayList<>();
for (android.util.Size androidSize : configMap.getOutputSizes(SurfaceTexture.class)) {
supportedPictureSizes.add(new Size(androidSize));
}
return supportedPictureSizes;
} 我这个usbcamera,可以同时兼容api1和api2,当然,如果想要让api2也来调用的话,camera_metadata_t *mStaticCharacteristics;这个值要配好,必须按api2的规范来,该有的值一个都不能少,要不然app在调用getStreamConfigurationMap去获取属性时,就有可能会因为获取不到对应的值而报错。
比如一开始,我在staticCharacteristics这个函数里,没有配置ANDROID_REQUEST_AVAILABLE_CAPABILITIES相关的属性。然后app在用api2的接口去getStreamConfigurationMap的时候,就因为找不到REQUEST_AVAILABLE_CAPABILITIES而报错了。至于api2都需要哪些配置项,大家可以参考frameworks\base\core\java\android\hardware\camera2\impl\CameraMetadataNative.java里的getStreamConfigurationMap()这个函数,这里需要的,都给加上,都必须加上。
后来报错后,我在staticCharacteristics这个函数里,加下了如下代码,就可以了:
Vector available_capabilities;
available_capabilities.add(ANDROID_REQUEST_AVAILABLE_CAPABILITIES_READ_SENSOR_SETTINGS);
available_capabilities.add(ANDROID_REQUEST_AVAILABLE_CAPABILITIES_PRIVATE_REPROCESSING);
available_capabilities.add(ANDROID_REQUEST_AVAILABLE_CAPABILITIES_YUV_REPROCESSING);
cm.update(ANDROID_REQUEST_AVAILABLE_CAPABILITIES,
available_capabilities.array(),
available_capabilities.size()); 到这里,我们一个完整的usbcamera hal就添加完成了。当然,虚拟摄像头也是一样的。唯一不同的是camera.cpp里的processCaptureRequest这个函数。我们的usbcamera是真正的一个摄像头,是可以取到实景的,所以就按照v4l2的标准来读取,然后按camera hal的规范来填充就可以。 但是虚拟摄像头因为是没有真正的摄像头的,它取的景,是底层事先录好一个视频,然后喂给buff的。所以虚拟摄像头,需要修改processCaptureRequest这个函数。
虚拟摄像头,只需要在这个函数里,按照app设置的帧率来循环读取视频里的数据,然后abgr的格式,喂给processCaptureResult这个函数,这个函数,再通过回调mCallbackOps->process_capture_result,返回给上面即可。