科技概念/名词解释
文章目录
- 自然科学
- 算法类
- 无人机
- 互联网
- 软件类
- 硬件类
- 计算机架构类
- 人工智能
自然科学
量子
百度百科
量子(quantum)是现代物理的重要概念。即一个物理量如果存在最小的不可分割的基本单位,则这个物理量是量子化的,并把最小单位称为量子。
研究表明,不但能量表现出这种不连续的分离化性质,其他物理量诸如角动量、自旋、电荷等也都表现出这种不连续的量子化现象。
科学家们把在研究原子、分子、原子核、基本粒子时所观察到的关于微观世界的系列特殊的物理现象,这些现象无法用牛顿经典物理学解释,所以另命名了一个名称,叫做 量子现象 。
在微观领域中,某些物理量的变化是以最小的单位跳跃式进行的,而不是连续的,这个最小的单位叫做 量子 。
光子,原子,能量子,电子等。微观世界不可再分的基本单位都是量子。
**量子是一种非连续性波动的微粒子,它具有 波粒二象性 。 **
波粒二象性(wave-particle duality)指的是所有的粒子或量子不仅可以部分地以粒子的术语来描述,也可以部分地用波的术语来描述。
即有粒子的跳跃式性质,也有波的衍射现象。
电磁波
物质内部得带电粒子一直在做着无规则得变速运动,这种运动会产生交变得电磁场,其在空间传播的能量称为电磁辐射能。
电磁波&机械波
电磁波和机械波的异同点如下:
相同点:
1、都有波的的一切特性,如:都能产生反射、折射、干涉、衍射等现象。2、波速、波长、频率之间具有同样的关系。
不同点:
1、产生机理不同,机械波是由机械振动产生的;电磁波产生机理也不同,有电子的周期性运动产生(无线电波);有原子的外层电子受激发后产生(红外线、可见光、紫外线);有原子的内层电子受激发后产生(伦琴射线);有原子核受激发后产生(射线)。
2、介质对传播速度的影响不同。
①机械波的传播速度由介质决定,与频率无关,即同种介质不同频率的机械波传播速度相同。如声波在温度15时的空气中传播速度为340m/s,温度不同时传播速度不同,但与频率无关。
②电磁波在真空中传播速度相同,均为3×108m/s。在同种介质中不同频率的电磁波传播速度不同,频率越大传播速度越小,如:红光和紫光在同种介质中折射率n红小于n紫。
③机械波不能在真空中传播,电磁波能在真空中传播,其原因是:机械波传播的是振动形式,通过振动形式传递能量,其本身不是物质,故不能在真空中传播;而电磁波是电磁场在空间的传播,本身就是物质,在真空中可以传播,而在介质中传播速度反而受影响
扩展资料:
电磁波是电磁场的一种运动形态。电与磁可说是一体两面,变化的电场会产生磁场(即电流会产生磁场),变化的磁场则会产生电场。
变化的电场和变化的磁场构成了一个不可分离的统一的场,这就是电磁场,而变化的电磁场在空间的传播形成了电磁波,电磁的变动就如同微风轻拂水面产生水波一般,因此被称为电磁波,也常称为电波。
激光&无线电&超声波
激光是频率较高的电磁波,
无线电是频率较低的电磁波,
光是一定频率的电磁波,不同频率的电磁波颜色及可见度不同。
它们都是电磁波的组成部分,不存在是与不是的关系。
本质虽然都是电磁波,但是不能说激光是无线电波,也不能说无线电波是激光。
超声波是声波,
声波:声波是机械波,它传播的是振动以及能量。发声体产生的振动在空气或其他物质中的传播,需要借助介质向四面八方传播

算法类
鲁棒性
https://baike.baidu.com/item/鲁棒性/832302?fr=aladdin
鲁棒是Robust的音译,也就是健壮和强壮的意思。它也是在异常和危险情况下系统生存的能力。比如说,计算机软件在输入错误、磁盘故障、网络过载或有意攻击情况下,能否不死机、不崩溃,就是该软件的鲁棒性。所谓“鲁棒性”,也是指控制系统在一定(结构,大小)的参数摄动下,维持其它某些性能的特性。根据对性能的不同定义,可分为稳定鲁棒性和性能鲁棒性。以闭环系统的鲁棒性作为目标设计得到的固定控制器称为鲁棒控制器。
无人机
PX4
PX4是与平台无关的自动驾驶仪软件(或称为固件),可以驱动无人机或无人车。它可以被烧写在某些硬件(如Pixhawk v2),并与地面控制站在一起组成一个完全独立的自动驾驶系统。
QGroundControl
PX4地面控制站被称为QGroundControl,是PX4自驾系统不可分割的一部分,可以运行在Windows,OS X或Linux等多个平台。
使用QGroundControl,您可以将PX4固件烧写到硬件,设置机器,改变不同的参数,获得实时航班信息,创建和执行完全自主的任务。
pixhawk&PX4&APM
https://blog.csdn.net/znr1995/article/details/78526231
pixhawk是硬件平台;
PX4是pixhawk的原生固件,专门为pixhawk开发的。
APM(Ardupilot Mega)也是硬件;
Ardupilot是APM的固件,所以称ArduPilot固件也叫APM。
后来APM硬件性能不太够,所以APM固件也就针对兼容了Pixhawk硬件平台;
所以在pixhawk硬件平台上可以运行PX4固件(原生固件),也可以运行APM固件;
APM固件程序比较混乱,零散。维护者多,代码风格不太统一,而且是单片机这种调用程序,不好入门。但是成熟稳定,支持硬件多。
PX4固件,在nuttx嵌入式实时操作系统上运行。采用多任务,模块化设计。相对来说方便入门,代码风格比较统一。但是支持硬件少,相比APM固件不太稳定。
电调
电调,全称电子调速器,英文Electronic Speed Control,简称ESC。针对电机不同,可分为有刷电调和无刷电调。它根据控制信号调节电动机的转速。
电调最主要的应用是航模,车模,船模,飞碟,飞盘等等玩具模型上面。这些模型通过电调来驱动电机完成各种指令,模仿其真实工作功能,以达到与真实情况相仿的效果。所以有专门为航模设计的航模电调,为车模设计的车模电调等等。电调的功效就是控制电机,完成规定速度、动作。所以电调在生产生活中也有很广阔的应用。比如电动工具上的电调,医疗设备上的电调,汽车涡轮机上的电调,特种风机专用电调等等,不一而足。某些电调的生产厂家会根据你的不同需要和电机参数,为你量身定制电调。百度百科
IMU 惯性测量单元
IMU(英文Inertial measurement unit,简称 IMU),是测量物体三轴姿态角及加速度的装置。一般IMU包括三轴陀螺仪及三轴加速度计,某些9轴IMU还包括三轴磁力计。
飞机飞行原理3D动态图
www.sohu.com/a/338275005_99958456
系统辨识
系统辨识是根据系统的输入输出时间函数来确定描述系统行为的数学模型。现代控制理论中的一个分支。通过辨识建立数学模型的目的是估计表征系统行为的重要参数,建立一个能模仿真实系统行为的模型,用当前可测量的系统的输入和输出预测系统输出的未来演变,以及设计控制器。对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号。
https://baike.baidu.com/item/系统辨识/5815309?fr=aladdin
桨距:
螺旋桨的桨叶都与旋转平面有一个倾角。假设螺旋桨在一种不能流动的介质中旋转,那么螺旋桨每转一圈,就会向前进一个距离,连续旋转就形成一段螺旋。同一片桨叶旋转一圈所形成的螺旋的距离,就称为桨距。显然,桨叶的角度越大,桨距也越大,角度与旋转平面角度为0,桨距也为0。这个“距”,就是桨叶旋转形成的螺旋的螺距。
https://baike.baidu.com/item/桨距/8033586?fr=aladdin
各种类型无人机
无人机从飞行器类型上区分可以分为固定翼无人机和旋翼无人机(旋翼机又有单旋翼也就是直升机和多旋翼之分),它们各有优缺点。
固定翼无人机优点是:航时更长、速度更快,飞行效率高一旦失去动力还有一定机会靠滑翔降低下降速度减少坠机损失,缺点是需要专门的开阔地用于起飞降落,并且无法实现悬停。
旋翼无人机优点是更易精准的控制,稳定的悬停更是先天优势,缺点是飞行效率低续航时间短,一旦失去动力就只有坠机的份了。
以用途作为划分无人机的标准,是比较常用的做法。按照用途分类,无人机可以分为军用无人机和民用无人机,目前超过 70% 的无人机使用于军事用途。其次是从技术角度划分,将无人机分为 6 大阵营,分别是无人直升机、无人固定翼机、无人多旋翼飞行器、无人飞艇、无人伞翼机、扑翼式微型无人机。
无人直升机:一般这类无人机是靠一个或者两个主旋翼提供升力。如果只有一个主旋翼的话,还必须要有一个小的尾翼抵消主旋翼产生的自旋力。优点是可以垂直起降,续航时间比较中庸,载荷也比较中庸,但结构相对来说比较复杂,操控难度也较大。
无人固定翼机:固定翼,顾名思义,就是机翼固定不变,靠流过机翼的风提供升力。跟我们平时做的飞机一样,固定翼无人机起飞的时候需要助跑,降落的时候必须要滑行,但这类无人机续航时间长、飞行效率高、载荷大。
无人多旋翼飞行器:由多组动力系统组成的飞行平台,一般常见的有四旋翼、六旋翼、八旋翼……甚至更多旋翼组成。多旋翼机械结构非常简单,动力系统只需要电机直接连桨就行。优点是机械简单,能垂直起降,缺点是续航时间最短,载荷小。
无人飞艇:飞艇是一种轻于空气的航空器,它与热气球最大的区别在于具有推进和控制飞行状态的装置。这类飞行器是一种理想的空中平台,无论是用来空中监视、巡逻、中继通信还是空中广告飞行、任务搭载试验、电力架线,其应用范围是广泛的。
无人伞翼机:一种用柔性伞翼代替刚性机翼的飞机,伞翼大部分为三角形,也有长方形的。伞翼可收叠存放,张开后利用迎面气流产生升力而升空,起飞和着陆滑跑距离短,只需百米左右的跑道,常用于运输、通信、侦察、勘探和科学考察等。
扑翼式微型无人机:这类飞行器是从鸟类或者昆虫启发而来的,具有可变形的小型翼翅。它可以利用不稳定气流的空气动力学,以及利用肌肉一样的驱动器代替电动机。在战场上,微型无人机、特别是昆虫式无人机,不易引起敌人的注意。即使在和平时期,微型无人机也是探测核生化污染、搜寻灾难幸存者、监视犯罪团伙的得力工具。
近年来,昆明劲鹰多旋翼无人机因为其轻巧灵活,起飞降落影响因素小,便于携带等优势受到民用领域越来越多的关注,按照现在的发展趋势,多旋翼无人机或将在未来成为主流。
末端攻击
洲际导弹因为飞行距离长,在大气层外飞行阻力小,所以通常洲际导弹都在大气层外飞行。洲际导弹一般飞行时要经历三个阶段。基地的起始阶段;大气层外的飞行阶段;末段攻击阶段。所谓末端攻击就是指导弹接近目标的最后一段距离的攻击。
高动态
互联网
软件类
BSD软件许可
BSD开源协议是一个给予使用者很大自由的协议。基本上使用者可以"为所欲为",可以自由的使用,修改源代码,也可以将修改后的代码作为开源或者专有软件再发布。但"为所欲为"的前提是当你发布使用了BSD协议的代码,或者以BSD协议代码为基础做二次开发自己的产品时,需要满足三个条件:1.如果再发布的产品中包含源代码,则在源代码中必须带有原来代码中的BSD协议。2.如果再发布的只是二进制类库/软件,则需要在类库/软件的文档和版权声明中包含原来代码中的BSD协议。3.不可以用开源代码的作者/机构名字和原来产品的名字做市场推广。
GIS地理信息系统

处理地理信息的系统,将不同层有关地理的信息,如植被覆盖情况作为信息的一层,道路作为地理信息的一层,很多层与地理有关的信息叠加在一起,则需要对应管理及分析不同层地理信息的系统。管理系统+信息数据构成GIS。
Bit下载
https://baike.baidu.com/item/BT下载/373644?fr=aladdin
BT首先在上传端把一个文件分成了Z个部分,甲在服务器随机下载了第N个部分,乙在服务器随机下载了第M个部分,这样甲的BT就会根据情况到乙的电脑上去下载乙已经下载好的M部分,乙的BT就会根据情况到甲的电脑上去下载甲已经下载好的N部分,这样就不但减轻了服务器端的负荷,也加快了用户方(甲乙)的下载速度,效率也提高了,更同样减少了地域之间的限制。比如说丙要连到服务器去下载的话可能才几K,但是要是到甲和乙的电脑连上去下载就快得多了。所以说用的人越多,下载的人越多,大家也就越快,BT的优越性就在这里。
区块链&比特币
finance.ifeng.com/c/7rFZUiUFuU4
区块链原本是一种基于互联网的信息编码、传输、加密、解密、验证技术,提出了去中心化的理念。信息平等化。
比特币的游戏是这么玩的,就两条核心规则。第一,它的货币发行不是由某个机构说了算,而是公开一套算法,每算出一个符合要求的数字,就相当于挖到了若干个比特币。谁都可以去算,绝对公平,谁也作不了弊,因为算法本质上就是一个个数字去凑,凑出一个算一个。第二,比特币的交易信息不是记在某一台服务器上的,而是所有参与这个游戏的玩家电脑中一人一份,同步记录,这种交易记录在理论上几乎是无法篡改的。
jar包
AR 文件就是 Java Archive File,顾名思意,它的应用是与 Java 息息相关的,是 Java 的一种文档格式。JAR 文件非常类似 ZIP 文件——准确的说,它就是 ZIP 文件,所以叫它文件包。JAR 文件与 ZIP 文件唯一的区别就是在 JAR 文件的内容中,包含了一个 META-INF/MANIFEST.MF 文件,这个文件是在生成 JAR 文件的时候自动创建的。
JAR文件是跨平台的,所以不必关心涉及具体平台的问题。除了可以包括声音和图像文件以外,也可以在其中包括类文件。
涉及因特网应用时,JAR文件显得特别有用。在JAR文件之前,Web浏览器必须重复多次请求web服务器,以便下载完构成一个“程序片”(Applet)的所有文件。除此以外,每个文件都是未经压缩的。但在将所有这些文件合并到一个JAR文件里以后,只需向远程服务器发出一次请求即可。同时,由于采用了压缩技术,所以可在更短的时间里获得全部数据。另外,JAR文件里的每个入口(条目)都可以加上数字化签名(详情参考Java用户文档)。
一个JAR文件由一系列采用Zip压缩格式的文件构成,同时还有一张“详情单”,对所有这些文件进行了描述(可创建自己的详情单文件;否则,jar程序会为我们代劳)。在联机用户文档中,可以找到与JAR详情单更多的资料(详情单的英语是“Manifest”)。
jar实用程序已与Sun的JDK配套提供,可以按我们的选择自动压缩文件。请在命令行调用它JAR 文件格式以流行的 ZIP 文件格式为基础。与 ZIP 文件不同的是,JAR 文件不仅用于压缩和发布,而且还用于部署和封装库、组件和插件程序,并可被像编译器和 JVM 这样的工具直接使用。在 JAR 中包含特殊的文件,如 manifests 和部署描述符,用来指示工具如何处理特定的 JAR。
关于使用java语言编写app的原因
网上参考:
选择Java肯定是google经过深思熟虑的抉择,先说能确定的优势,
Java有跨平台优势,手机的硬件可能千差万别,Java软件可以只出一套执行档。而C/C++需要针对机型出专用的编译版。
Java有大量人员优势,几乎不用重复学习就能做android。
Java天生是做应用的语言,和C/C++不同,Java的语言和类库都是多年积累的、应用最需要的常用功能。
关于性能,说些个人看法。
越是应用,新创意的成分可能越多,定式越少。这时候用一些宽松的语言越能快速的实现产品。
相反没有创意的复制,才需要高效的语言。比如压缩算法-视频编码、比如3d绘制算法,都是专家组总结的最佳算法,没有创意只需要实现,这时就需要最高效的语言最大限度的发挥cpu,所以这里用c都不够,甚至要汇编SIMD,甚至要电路硬件解码。
有创意的东西、特别是新东西、还没来得及形成定式,这时需要一些很灵活的语言,比如网页网站一日数变,甚至Java都不够灵活,需要更灵活的脚本语言python、php之类才合用。
总之,Java是个灵活和性能的一种折中,不够最快但够快,不是最灵活但够灵活。所以才适合做这些应用软件。
个人解释:
C/C++的代码对硬件有依赖性,不同的CPU型号,需要的编译器不同,因此,如果用C/C++写app,则要解决不同机型的编译器不同的问题。机型不同,则需要适配编译器,会是非常繁复的工作量。
因此系统需要适配,因为系统底层需要对硬件设备的支持及性能的最大使用优化。所以底层要用C/C++语言编写,最底层需要汇编。
C & C++
C: 主要是面向过程的编程,代码效率高;
C++:在C的基础上加入了面向对象的一系列元素,以及函数的引用及重用等,代码结构更加清晰,方便移植,但是代码效率没有C高;
硬件类
触摸屏原理
http://baijiahao.baidu.com/s?id=1603579964610413218&wfr=spider&for=pc
简单的电容屏是一个四层复合玻璃板,其中有层ITO材料。ITO是一种氧化铟锡材料,它透明,并且可以导电,适合于制造触摸屏幕。
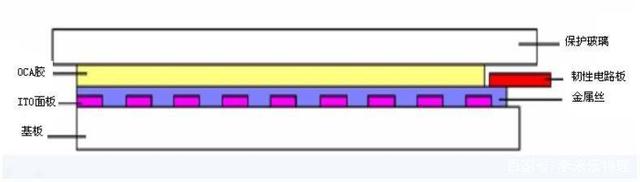
当手指接触屏幕上某个部位时,就会与ITO材料构成耦合电容,改变触点处的电容大小。屏幕的四个角会有导线,由于交流电可以通过电容器,四个导线的电流会奔向触点,并且电流大小与到触点的距离有关。手机内部的芯片可以分析四个角的电流,通过计算就可以得到触点的位置。

GPS工作原理
GPS导航系统的基本原理是测量出已知位置的卫星到用户接收机之间的距离,然后综合多颗卫星的数据就可知道接收机的具体位置。
要达到这一目的,卫星的位置可以根据星载时钟所记录的时间在卫星星历中查出。
而用户到卫星的距离则通过记录卫星信号传播到用户所经历的时间,再将其乘以光速得到(由于大气层电离层的干扰,这一距离并不是用户与卫星之间的真实距离,而是伪距(PR,):当GPS卫星正常工作时,会不断地用1和0二进制码元组成的伪随机码(简称伪码)发射导航电文。
Flash、RAM、ROM
https://blog.csdn.net/weixin_42005205/article/details/80680272
ROM(Read Only Memory),只读存储器。用来存储和保存数据。ROM数据不能随意更新,但是在任何时候都可以读取。即使是断电,ROM也能够保留数据。
RAM(Random Access Memory), 随机存取存储器。是与CPU直接交换数据的内部存储器,也叫内存。它可以随时读写,而且速度很快,通常作为操作系统或其他正在运行中的程序的临时数据存储媒介, 当电源关闭时RAM不能保留数据。
FLASH闪存,它属于内存器件的一种,是一种不挥发性( Non-Volatile )内存,结合了ROM和RAM的长处,不仅具备电子可擦除可编程(EEPROM)的性能,还不会断电丢失数据同时可以快速读取数据(NVRAM的优势),U盘和MP3里用的就是这种存储器。在过去的20年里,嵌入式系统一直使用ROM(EPROM)作为它们的存储设备,然而近年来Flash全面代替了ROM(EPROM)在嵌入式系统中的地位,用作存储Bootloader以及操作系统或者程序代码或者直接当硬盘使用(U盘)。FLASH属于广义上的ROM,和EEPROM的最大区别是FLASH按扇区操作,相对于EEPROM的改进就是擦除时不再以字节为单位,而是以块为单位,一次简化了电路,数据密度更高,降低了成本。上M的ROM一般都是FLASH。而EEPROM则按字节操作。
GPU, CUDA,cuDNN
GPU,CUDA,cuDNN的理解

GPU(图像处理器,Graphics Processing Unit)和CPU(中央处理器,Central Processing Unit)在设计上的主要差异在于GPU有更多的运算单元(如图中绿色的ALU),而Control和Cache单元不如CPU多,这是因为GPU在进行并行计算的时候每个运算单元都是执行相同的程序,而不需要太多的控制。Cache单元是用来做数据缓存的,CPU可以通过Cache来减少存取主内存的次数,也就是减少内存延迟(memory latency)。GPU中Cache很小或者没有,因为GPU可以通过并行计算的方式来减少内存延迟。因此CPU的Cahce设计主要是实现低延迟,Control主要是通用性,复杂的逻辑控制单元可以保证CPU高效分发任务和指令。所以CPU擅长逻辑控制,是串行计算,而GPU擅长高强度计算,是并行计算。打个比方,GPU就像成千上万的苦力,每个人干的都是类似的苦力活,相互之间没有依赖,都是独立的,简单的人多力量大;CPU就像包工头,虽然也能干苦力的活,但是人少,所以一般负责任务分配,人员调度等工作。
可以看出GPU加速是通过大量线程并行实现的,因此对于不能高度并行化的工作而言,GPU就没什么效果了。而CPU则是串行操作,需要很强的通用性,主要起到统管和分配任务的作用。
CUDA
https://blog.csdn.net/feifeiyechuan/article/details/94451052
CUDA是NVIDIA推出的用于自家GPU的并行计算框架,也就是说CUDA只能在NVIDIA的GPU上运行,而且只有当要解决的计算问题是可以大量并行计算的时候才能发挥CUDA的作用。
cuDNN
cuDNN(CUDA Deep Neural Network library):是NVIDIA打造的针对深度神经网络的加速库,是一个用于深层神经网络的GPU加速库。如果你要用GPU训练模型,cuDNN不是必须的,但是一般会采用这个加速库。
总结:简单来说,CPU适合串行计算,擅长逻辑控制。GPU擅长并行高强度并行计算,适用于AI算法的训练学习
CUDA 是NVIDIA专门负责管理分配运算单元(GPU)的框架
cuDNN是用于深层神经网络的gpu加速库
网关
网关(Gateway)又称网间连接器、协议转换器。网关在网络层以上实现网络互连,是复杂的网络互连设备,仅用于两个高层协议不同的网络互连。网关既可以用于广域网互连,也可以用于局域网互连。
用来联通各个局域网之间的通信。网关百科
网关实质上是一个网络通向其他网络的IP地址。比如有网络A和网络B,网络A的IP地址范围为“192.168.1.1~192. 168.1.254”,子网掩码为255.255.255.0;网络B的IP地址范围为“192.168.2.1~192.168.2.254”,子网掩码为255.255.255.0。在没有路由器的情况下,两个网络之间是不能进行TCP/IP通信的,即使是两个网络连接在同一台交换机(或集线器)上,TCP/IP协议也会根据子网掩码(255.255.255.0)判定两个网络中的主机处在不同的网络里。而要实现这两个网络之间的通信,则必须通过网关。如果网络A中的主机发现数据包的目的主机不在本地网络中,就把数据包转发给它自己的网关,再由网关转发给网络B的网关,网络B的网关再转发给网络B的某个主机(如附图所示)。网络A向网络B转发数据包的过程。
usb四针引脚
usb接口从左至右排序,各引脚功能如下:
引脚1:电源。USB设备供电端口(+5V)。
引脚2:接入南桥,传输数据。
引脚3:传输数据。但两个引脚各有不同,是传输信息的高地位不同。 引脚4:接电源地线。构成电路。
引脚,又叫管脚,英文叫Pin。就是从集成电路(芯片)内部电路引出与外围电路的接线,所有的引脚就构成了这块芯片的接口。引线末端的一段,通过软钎焊使这一段与印制板上的焊盘共同形成焊点。引脚可划分为脚跟(bottom)、脚趾(toe)、脚侧(side)等部分。
扩展资料:
usb接口引脚线接口线束颜色:
排列方式从左到右是:红白绿黑。
红色-USB电源:标有-VCC、Power、5V、5VSB字样。引脚1。
白色-USB数据线:(负)-DATA-、USBD-、PD-、USBDT-。引脚2。
绿色-USB数据线:(正)-DATA+、USBD+、PD+、USBDT+。引脚3。
黑色-地线:GND、Ground。引脚4。
USB是一种常用的pc接口,他只有4根线,两根电源两根信号,故信号是串行传输的,usb接口也称为串行口,usb2.0的速度可以达到480Mbps。可以满足各种工业和民用需要。
USB接口的输出电压和电流是: +5V 500mA 实际上有误差,最大不能超过+/-0.2V 也就是4.8-5.2V 。
usb接口的4根线一般是下面这样分配的,需要注意的是千万不要把正负极弄反了,否则会烧掉usb设备或者电脑的南桥芯片:
红线:vcc;白线:data- ;绿线:data+; 黑线:gnd。
直流(DC)及交流(AC)
直流电的电流方向或电流大小都是不变的,而交流电的电流会随时间发生不同的变化。
两者在社会中的应用都是很普遍的,直流电的典型应用就是电池。有了电池很多家用电器这些才能参与运作。而且交流电在我们的生活更是普遍;
我们的家庭用电都是用的交流电,交流量有个典型的好处,那就是方便。大家都知道,我们用的电都有零钱和火线两股,就拿家用的220V电来说,零线的电位是0V,火线因为时间不同分别对零线产生加减的相应电位,加的时候电流是一个方向,减的时候电流又是一个方面,这样就形成了交替变换方向的电流,所以叫做交流电。再说说零线是相对安全的,而火线随时都会产生电流,所以不管是电灯开关,还是电源匝道都是对火线进行的控制。
交流电还有一个好处就是,可以进行升压或者降压,有利用输送,发电的效率更高,生产用的设备更简单方便,相对直流电在这些方面就没有明显的优势。而且它向直流电转换也是很方便的,如果直流电转交流电就麻烦得多了。
关于汇编访问地址
汇编书上讲的,是基于实模式的DOS环境的。
DOS没有采用虚拟内存技术。
在真的DOS中,物理地址就是实际的内存地址。
在采用了虚拟内存技术的操作系统中,所有程序(包括用汇编语言编写的程序)所访问的,都是逻辑地址。
这些逻辑地址,通过操作系统的内存管理,映射到真实的内存中。
这时,程序中的逻辑地址对应的实际内存地址是哪里,与内存管理有关,由内存管理决定。
红外摄像头
目前的摄像机大多数采用CCD作为感光组件,CCD本身就可以感应到红外光线,因此采用CCD作为感光组件的摄像机,只要在CCD前加上红外滤光镜,便具备红外摄像的能力,这也是目前市面上所谓的日夜两用型摄像机的基本运作原理。只不过这种光线的需求比较低,也因此,日夜两用型摄像机有时也被称为低照度摄像头
红外摄像机前端带有红外灯,它可以接受自身发出的红外线的反射光,适合夜间或者光线很暗的场所使用。日夜两用型摄像机白天光线亮度好的时候是彩色模式,夜间会自动根据光线强弱变成红外模式,这个也有红外灯。
一、日夜两用型摄像机的优缺点:
1、日夜两用型摄像机是在白天和晚上都能使用的摄像机,在一些夜晚时的环境光线还不太差的场所,晚上转为黑白后,如果外界有红外灯,就会在彩色和红外之间不停转换。
二、红外摄像机的优缺点
1、夜视距离远、隐蔽性强、性能稳定等优势,但在白天,监控图像偏色。
2、红外灯寿命问题与照射距离有关,照射的距离越长,红外灯所需的功率就越大,而增加功率使得摄像机内部温度提高,摄像机很容易损坏。
3、图像偏色问题
所有的黑白摄像机都是感应红外光的。在可见光条件下,红外光线对于彩色摄像机来讲是一种杂光,会降低彩色摄像机的清晰度和色彩还原。而摄像机使用CCD是感应所有光线(可见光、红外线和紫外线等)的,这就造成在白天所拍摄的影像和我们肉眼只观察到可见光所产生的影像很不同,由于CCD感应到了红外线,它会干扰到DSP的运算,导致偏色。
4、散热问题
由于配置了发热量较大的红外灯,红外灯在启动后,整个工作时间段内(以12小时计)在红外摄像机前部会有热量集中,即腔体内前端温度偏高,如不能散热均匀定会影响摄像机等其他部件正常工作。
由于红外发光LED的辐射功率是和电流成正比的,很多不规范厂家就用加大电流的方式来提高照射效果,然而电流越大温度越高。照射效果虽然提高了,但是机器本身由于LED过热会受到很大的伤害。其中,LED板后面的CCD就是最直接的受害者。CCD一般只能支撑到60-70度。
5、红暴问题
红暴是由于所发射的红外线中包含可见光的成分。波长超过700nm的光线叫做红外线,900nm以上的红外线基本无红暴,波长越短,红暴越强,红外线感应度也越高。
其实,红外灯可以完全无红暴(采用940~950nm波长红外管)或仅有微弱红暴。目前市面上有两种主流红外灯,一种是有轻微红暴的,波长在850nm左右;一种是无红暴的,波长在940nm左右。同一款相机,在850nm波长的感应度比在940nm波长的感应度好到10倍。座椅,850nm这种有轻微红暴的红外灯拥有更高的效率,应当成为红外色号相机的首选项。
红外摄像头的拍出来的是有些偏红。彩色的 ,会偏色。
窄带摄像头(近红外)拍出来的效果 ,有些近似黑白。
普光,红外及纯红外窄带摄像头拍摄原理及效果:
普光+红外:可见光+红外指定频段的光线可以通过,图像彩色、白天效果好、偏色根据红外的频段有所区别,可通过频段高光线的摄像头偏色严重。但是低照度效果好(在光线暗的情况下的拍摄效果好)。
窄带:屏蔽可见光,只允许指定频段附近的红外光线通过,不受其他光线影响,图像黑灰白。
窄带850红外,就是指只允许850nm的光线通过;
窄带940红外,就是指只允许940nm的光线通过;
USB接口系统要保留10%的带宽
USB1.1协议中定义了低速和全速的传输,USB2.0协议中定义了低速、全速和高速的传输。
低速USB的时钟频率是1.5MHz
全速USB的时钟频率是12MHz
高速USB的时钟频率是480MHz
USB传输又分四种:控制、中断、成组和同步(Control, Interrupt, Bulk and Isochronous)。
不同的传输速度下不同的传输方式有不同的理论传输速度,不能笼统地说。
不管哪种传输速度,同步传输的理论传输速度最快,控制传输的理论传输速度最慢。
USB系统要保留10%的带宽
usb1.1 12Mb/s 极限速度是 1MB/s 接口效率为1MB/1.5MB*100%=66.7%
usb2.0 480Mb/s 极限速度约40MB/s
USB 3.0的传输速度是4.8Gbps,是USB 2.0的十倍。没错,是G级的,但这是位(bit),而不是字节(Byte)。就像你拉一条4Mbps的网线,实际下载速度只能达到512KB/S一样。因为8位=1字节,即4.8Gbps=600MB/S,这还是理论值。
移动硬盘USB2.0写速度需要在20MB/s左右
那10%带宽是用在主板和USB接口的控制连接
高清摄像头和红外线摄像头的区别
1.原理不同:红外线摄像头利用红外灯发出红外线照射物体,红外线漫反射,被监控摄像头接收,形成视频图像。类似于夜里使用用手电筒,手电筒相当于红外灯,摄像头相当于人眼球。高清摄像头的工作原理类似于摄像机录像。
2.需要可见光程度不同:红外线摄像头不需要可见光,在夜晚图象清晰度甚至超过白天。高清摄像头工作需要一定程度的可见光,否则图形会模糊不清。
3.面对烟雾效果不同:红外线摄像头可完全穿透浓烟,或者部分衰减地穿透浓雾。高清摄像头工作不能穿透浓烟、浓雾。
4.应用不同:红外线摄像头主要用于视频会议、数码拍照、视频聊天等。高清摄像头主要应用于高铁、森林防火、机场安全、边海防等高端安防领域。
5.监视面积不同:红外热像监控头属于面阵探测设备,监视面积极大。它具有76800个探测器单元,同时测量全画面中76800个像数点的温度数据,成温度分布热图象。高清摄像头的清晰度高,但监视面积小于红外线摄像头。
高清摄像头和红外摄像头都属于监控摄像头的一个分支,高清摄像头可能也带有红外功能,红外摄像头也可能是高清摄像头,区别需要具体型号具体分析。
目前高清摄像头指的是HD 1080P或HD 960P或HD 720P的摄像头,而1080P的称为全高清。
红外摄像机就是指那种可以日夜24小时监控的那种摄像机。又有普通红外摄像机和点阵红外摄像机之分, 点阵红外摄像机比普通的要好,照射距离远, 画质细腻清晰 ,而且使用寿命比普通红外的长。红外摄像头感光就是红外线,在某个波段范围内,比如800nm-1100nm。如果从光谱来讲,和普通摄像头感可见光原理类似。红外摄像头工作原理是红外灯发出红外线照射物体,红外线漫反射,被监控摄像头接收,形成视频图像。
分辨率1920*1080
分辨率1920*1080表示在显示上,长为1920个像素点,宽为1080个像素点。显示分辨率(屏幕分辨率)是屏幕图像的精密度,是指显示器所能显示的像素有多少。由于屏幕上的点、线和面都是由像素组成的,显示器可显示的像素越多,画面就越精细,同样的屏幕区域内能显示的信息也越多,所以分辨率是个非常重要的性能指标之一。可以把整个图像想象成是一个大型的棋盘,而分辨率的表示方式就是所有经线和纬线交叉点的数目。显示分辨率一定的情况下,显示屏越小图像越清晰,反之,显示屏大小固定时,显示分辨率越高图像越清晰。
OTG
OTG是USB On-The-Go的缩写,“OTG技术就是在没有Host的情况下,实现设备间的数据传送。例如数码相机直接连接到打印机上,通过OTG技术,连接两台设备间的USB口,将拍出的相片立即打印出来;也可以将数码照相机中的数据,通过OTG发送到USB接口的移动硬盘上,野外操作就没有必要携带价格昂贵的存储卡,或者背一个便携电脑。 通过OTG技术,可以给智能终端扩展USB接口配件以丰富智能终端的功能,比如扩展遥控器配件,把手机、平板变成万能遥控器使用。”
手机上的OTG有什么用呢?
为设备供电
假如平板或者相机电量剩余不多了,又没有其他电源的情况下,可以将手机插上OTG线,另一端连接需要充电的设备,应急使用。
文件互传
通过OTG线,将手机与U盘、移动设备等USB存储设备相连接,然后进入 文件管理——本地——USB 即可在手机和USB储存设备间互传文件。在没有电脑的和网络的情况下,传输文件方便快捷。
扩展手机内存
手机内存不够用或者资料太多需要备份储存的时候,用OTG连接手机另一端连接U盘或者移动硬盘,把资料传输到外部设备上储存,为手机内存腾出空间。
连接外接设备
简直是爱打手游的盆友们的福音,用OTG连接手机和游戏手柄,可以拥有流畅痛快的游戏体验啦!当你网上学习查资料浏览新闻的时候,可以连接鼠标,更方便快捷。
计算机架构类
嵌入式系统
http://www.eepw.com.cn/article/215672.htm
定义是:嵌入式系统是针对某个应用,软硬件可裁减的,对体积,功耗,成本等等有严格要求的一个计算机系统。看起很复杂很抽象,其实就两点:
第一,嵌入式系统是一个计算机系统
第二,嵌入式系统是针对某个应用的,也就是通常所说的“专用的”。
大家都知道PC,或者笔记本电脑,PC或笔记本电脑是一个计算机系统,只不过是一个通用的计算机系统。通用的意思,是指没有特定的用途,什么都可以干,比如你可以拿笔记本来上网,来听歌,来看电影,来看照片,甚至还可以开发程序,做服务器等等…,反正你想干什么就干什么,没有强制的特定得用途。因此,是通用的,但嵌入式系统是专用的。用就是针对某个特定的用途
安卓架构
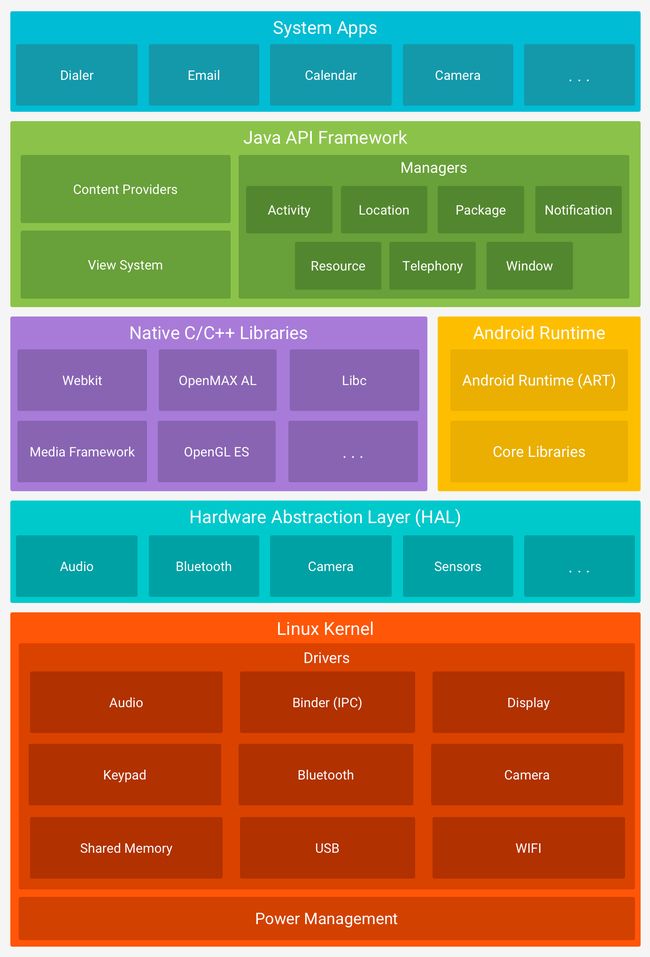
以上来自https://developer.android.google.cn/guide/platform/
GPU:
图像在计算机中是多维矩阵,有RGBA(红绿蓝透)四层通道的,每个像素在四通道的值叠加形成像素点颜色。因此(41024680)大小的矩阵(张量),因此计算是非常庞大的,如果用CPU计算,则CPU负担过大,甚至无法进行其他运算。因此,增加GPU这个构建,专门用于图像的计算,从而使CPU脱离出来去做其他事情。
4G
一种无线信号指定频段的发送接收技术。
4G模块
4G模块是指硬件加载到指定频段,软件支持标准的LTE协议,软硬件高度集成模组化的一种产品的统称。
包括调制解调器等。
modem
调制解调器:计算机在发送数据时,先由Modem把数字信号转换为相应的模拟信号,这个过程称为“调制”。经过调制的信号通过电话载波传送到另一台计算机之前,也要经由接收方的Modem负责把模拟信号还原为计算机能识别的数字信号,这个过程称为“解调”。正是通过这样一个“调制”与“解调”的数模转换过程,从而实现了两台计算机之间的远程通讯。
openGL
用于图形渲染,比如游戏一类的需要制作很多大型图像输出到屏幕。
JVM
JVM是Java Virtual Machine(Java虚拟机)的缩写,JVM是一种用于计算设备的规范,它是一个虚构出来的计算机,是通过在实际的计算机上仿真模拟各种计算机功能来实现的。
引入Java语言虚拟机后,Java语言在不同平台上运行时不需要重新编译。Java语言使用Java虚拟机屏蔽了与具体平台相关的信息,使得Java语言编译程序只需生成在Java虚拟机上运行的目标代码(字节码),就可以在多种平台上不加修改地运行。
Java语言的一个非常重要的特点就是与平台的无关性。而使用Java虚拟机是实现这一特
点的关键。一般的高级语言如果要在不同的平台上运行,至少需要编译成不同的目标代
码。而引入Java语言虚拟机后,Java语言在不同平台上运行时不需要重新编译。Java语
言使用模式Java虚拟机屏蔽了与具体平台相关的信息,使得Java语言编译程序只需生成
在Java虚拟机上运行的目标代码(字节码),就可以在多种平台上不加修改地运行。Java
虚拟机在执行字节码时,把字节码解释成具体平台上的机器指令执行。
简单来说就是要把Java装换成class可以跨平台运行
jni
JNI是Java Native Interface的缩写,通过使用 Java本地接口书写程序,可以确保代码在不同的平台上方便移植。 [1] 从Java1.1开始,JNI标准成为java平台的一部分,它允许Java代码和其他语言写的代码进行交互。JNI一开始是为了本地已编译语言,尤其是C和C++而设计的,但是它并不妨碍你使用其他编程语言,只要调用约定受支持就可以了。
sdk
软件开发工具包一般都是一些软件工程师为特定的软件包、软件框架、硬件平台、操作系统等建立应用软件时的开发工具的集合。
ndk
NDK:(Native Development Kit),原生开发工具包是一组可以让您在Android应用中利用C和c++代码的工具,可用以从您自己的源代码构建,或者利用现有的预构建库。
api
API(Application Programming Interface):应用程序编程接口,是一些预先定义的函数,目的是提供应用程序与开发人员基于某软件或硬件得以访问一组例程的能力,而又无需访问源码,或理解内部工作机制的细节。
URI
java编程概念词。
(Uniform Resource Identifier,统一资源标识符),表示的是web上每一种可用的资源,如 HTML文档、图像、视频片段、程序等都由一个URI进行定位的。
Qt
是一个跨平台的 C++ 开发库,主要用来开发图形用户界面(Graphical User Interface,GUI)程序,当然也可以开发不带界面的命令行(Command User Interface,CUI)程序。
BSP
(Board Support Package),板级支持包,也称为硬件抽象层HAL或者中间层。
人工智能
OpenAI Gym是一款用于研发和比较强化学习算法的工具包
对模型评价指标AUC的理解
https://www.jianshu.com/p/f07a79dfeb1d
https://blog.csdn.net/yinyu19950811/article/details/81288287
在实际的数据集中经常会出现类别不平衡现象,即负样本比正样本多很多(或者相反),而且测试数据中的正负样本的分布也可能随着时间而变化。而在这种情况下,ROC曲线能够保持不变。
PCA及SVD
用于数据降维,可用于数据压缩,将主要信息提取出来,过滤掉不重要或这重复冗余的信息维度。
PCA针对与方阵,求特征值及特征向量的方法,SVD针对与非方阵,奇异值分解的方法。
交叉熵
传统范数最小化
gram矩阵
协方差
方差
相关系数
KL散度
信息熵
Tx 可以理解为对矢量x的旋转及放缩,特征向量可以指示矩阵变换的作用方向,特征值可以指示对应特征向量的影响大小,如只放缩时,放缩的倍数
图像算法类:
图像生成算法:
GAN
https://www.jiqizhixin.com/articles/2019-05-13-12
VAE
NLP
自然语言处理
S2S Attention
GRU
LSTM
EM算法
adaboost
xgboost
hmm
mcmc