自动驾驶-卡尔曼滤波,从CF->KCF->UCF土味讲解
这篇文章目的在于让读者能够从整体思路概念上完全掌握kalman filter,同时对于一些具体细节有一个明确认知。讲解方法主要是结合参数说明的算法讲解。
卡尔曼滤波是什么
这里是让大家对卡尔曼有一个映像,后面通过原理说明来解释。
官方说明
卡尔曼滤波(Kalman filtering)是一种利用线性系统状态方程,根据系统输入(观测数据),对系统状态进行最优估计,更新系统估计状态,输出系统估计状态的方法。由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程。
土味说明
首先明确,卡尔曼滤波器中有一个系统状态量,用于记录最正确的结果;结合系统输入,用两个量计算出一个更精确的值,用这个值替代原来的系统状态量,完成一次卡尔曼滤波,而这个值也就是当次卡尔曼滤波的输出。
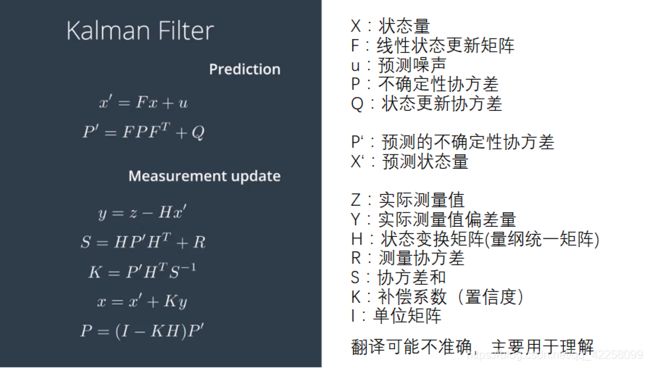
上图为kalman filter的算法步骤以及参量意义说明,下面针对其进行详细说明。
从上面可以直观的发现,x,P即系统状态量及其确定性协方差,不会没被释放,一直在迭代更新输出。
卡尔曼滤波原理
卡尔曼滤波可以简单分成预测和测量更新两个步骤。下面分别对两个阶段进行说明讲解。
Prediction
F是关于时间间隔的状态变换矩阵,可以用上一帧X计算当帧的预测状态量X’。而u是设计模型所带来的预测误差。
P是用来描述X的协方差矩阵,其中对角代表各参数值的精确度,越小越精确;对角外其他数值代表两个参数间的相关性,0代表不相关,数值越大相关性越强。
下面配合例子讲解。
——prediction例子
状态量X=[x,y,vx,vy],表示目标的速度和位置信息,假设模型为匀速模型,基于上一帧X预测当前帧的X’=[x,y,vx,vy]。公式如下所示:
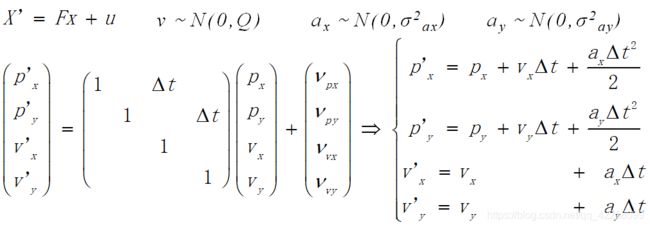
首先,由于是匀速模型,那么当然不用考虑 ax,ay 带来的影响,直接把v当作0进行运算即可,即u=[0,0,0,0]
由于模型为匀速模型,则误差是由于忽略加速度而引起的参数偏差,明确这个误差并无规律性,那么满足ν~N(0,Q)。
ax,ay 通过差分得到,这里就不解释F变换矩阵了,一目了然。
那么这里的v有什么用呢,干嘛一会说直接把v当成0,计算出u;一会把u当成ν~N(0,Q),好像没起到什么作用。
实际是为了计算预测不确定协方差,将在后面讲解。
这里再扩展说一下模型的作用,模型决定了预测的计算公式。只要是模型就一定有误差!但ν~N(0,Q)可能不成立,那么就要找到平均值完成运算,并在末端加上ν~N(0,Q)。总之要明确把误差零均值化!!!(算标准差也是先零均值化的)然后ν~N(0,Q)基于完成P’预测。
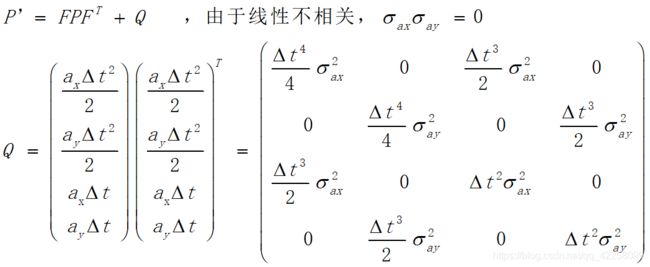
先说明Q,在说明一下FPFT。
前面说明了P是用来说明X的数值精确度以及参量之间的相关性。P‘就是要更新P并考虑上预测误差。已知ν~N(0,Q),v即为误差,那么根据协方差公式,求出Q,描述**X’**的协方差矩阵,其中对角代表各参数值的精确度,越小越精确;对角外其他数值代表两个参数间的相关性,0代表不相关,数值越大相关性越强。(你想想是不是这么回事)
FPFT,通过对比说明,假设p~N(u,σ),X就相当于这里的u,σ相当于P,表示p是关于X的方差为σ的分布。我们可以对于p进行拉伸、缩放、平移等操作,那么u,σ都会随之而变换,其中σ不会因平移而变化,但对于拉伸、缩放就会发生变化,而FPFT就是这样的作用,F是状态变化,那么P‘=FPFT+Q。
Measurement Update

Z是实际测量值,H是把X’与Z量纲统一的线性变换矩阵,比如说X记录使用的是s,km,N;测量值为h,m,kN,就可以通过线性变换完成量纲统一,从而求出y。
既然Hx与Z量纲统一,那么HP’H与R量纲统一,从而求出协方差合S。
下面通过对比说明K,比如你要把100g50元单价糖果合200g70元单价糖果混合成什锦糖果,那么定价一般想法肯定是加权平均嘛,price=1/3x50+2/3x70,那么这里的k也是类似的,用来表示P‘与S的比值,则X=(1-kH)X’+KZ’=X’+Ky。
ps.这里说一下为啥K=P’HTS-1,P’S-1 代表占比值,这里的 HT 是为了实现量纲统一,理解一下。。
这时你就发现不对了,K怎么用来描述Z的权重,(1-K)描述 X’ 的权重??来回忆一下协方差的意义以及我们的目标,协方差用来描述参量的准确性,我们要让准确性越高的量占比更多,从而得到最准确的估计量。那么HP‘HT占比越大代表X’应该占比更小,即P‘与权重成反比!所以这里干脆用K代表Z权重(理解一下!)
基于测量值Z更新完状态量X,下面更新P,既然通过X=X‘+Ky改变了状态量的值,那么P也发生相应变化。
这里也用一个对比说明,假设P,R为非矩阵常数量,那么下式成立。(当然这个变换在矩阵中是不成立的,只是用于理解而已。)

总而言之,P更新时差不多时发生这种变换,从而保证了P一定小于R和P’。
以上说完普通卡尔曼滤波。
扩展卡尔曼滤波
下面说说扩展卡尔曼,还是白话。如果你有注意到的话,KF是针对线性系统的,一些的变换累加都是基于线性系统,而扩展卡尔曼(Extend Kalman Filter)则把手伸向了非线性系统,实现在非线性系统上的滤波迭代作用。
简单说一下线性与非线性的区别,y=kx+b是直线,就是线性的,y=kx2+b就是非线性的,即应变量与变量之间的关系都是线性相关即为线性,否则为非线性。所以自然,三角变换,高次变换,logx,exp(x)都是非线性的。线性变换可以用矩阵表示,而非线性变换不可以!!!
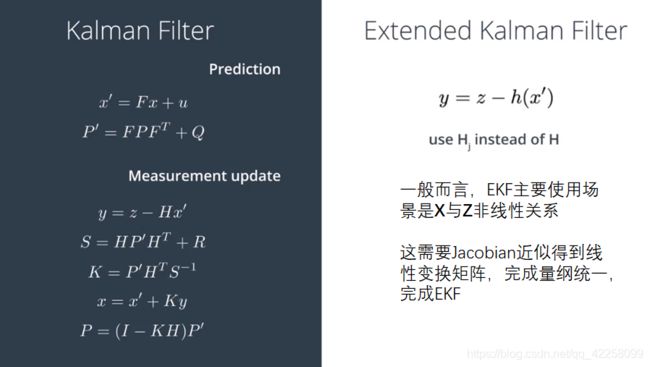
如图所示,EKF与KF的区别只有个,量纲统一矩阵H改变了(改变原因是由于矩阵只能表示线性变化),其他并没有什么不同,下面针对这个变化做一个说明。
前面也说了,EKF使用场景是测量值与状态量不完全满足线性关系,这在多数据源融合的时候较常用到。所以如果能够得到一个近似的线性变换矩阵,那么KF也就可以work了。
下面就介绍一下如何求解这样一个近似的变换矩阵,也就是被称为Jacobian矩阵。
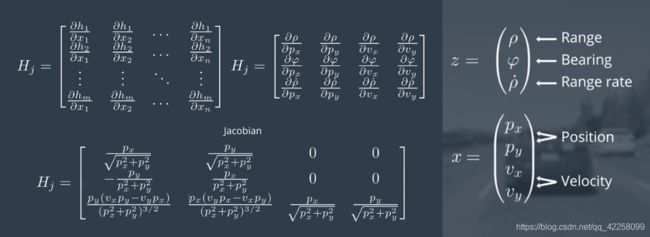
求法如上所示,其实就是关于Z求导X各个参量,直接看图上例子就好了。。。。
无损卡尔曼滤波
EKF解决了非线性系统卡尔曼滤波,KF解决了线性系统卡尔曼滤波,那不就完整了吗,那有无损卡尔曼滤波(Unsent Kalman Filter)什么事情?优化呀!KF已经够精简了,但EKF性能还可以提高。Jacobian矩阵涉及到求导,而求导对于处理器来说并不是一项简单的工作,那么用无损卡尔曼滤波,把非线性系统不通过求导的方式去拟合出一个变换矩阵,得到更好的结果。
写不动了,暂时不写了。。以后再写。。。