目标检测菜鸟起飞路线: 第一线--YOLOV3代码运行详解
目标检测菜鸟起飞路线
第一线:YOLOV3代码运行详解
我是个小白,我先跑通yolov3代码再说
参考文章:https://blog.csdn.net/m0_37857151/article/details/81330699
https://my.oschina.net/u/876354/blog/1927881
代码地址: https://github.com/qqwweee/keras-yolo3
一 数据集–仿照VOC2007数据集结构进行设置:
1.1 数据集采集
在百度上搜索汽车下载20张.jpg格式图片放到JPEGIMages文件中(如下图所示),本次只是测试,所以采集数据较少。

Annotations:用于存放标注后的xml文件,每一个xml对应一张图像,并且每个xml中存放的是标记的各个目标的位置和类别信息;
ImageSets/Main:用于存放训练集、测试集、验收集的文件列表;
JPEGImages:存储统一规则命名好的原始图像。
Annotations_txt:可忽略。
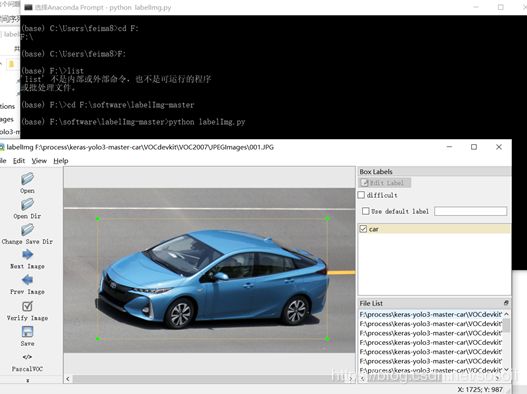
1.2 数据集标注
labelImg标注工具是一个目标检测标注目标的便捷的工具。
代码地址:https://github.com/tzutalin/labelImg
安装之前,在Anaconda Prompt安装
pip install PyQt5
pip install pyqt5-tools
下载labelImg的压缩文件,然后cd到目标文件夹
pyrcc5 -o resources.py resources.qrc
完成后,继续在该目标文件夹下输入
python labelImg.py
出现如下的图形,说明你安装成功。(labelimage 快捷键: A: prev image;D: next image;W:creat rectbox;ctrl+s: save xml)标注完成后,将文件保存到Annotations文件夹下。
1.3 划分训练集、测试集、验证集
完成所有汽车照片的标注后,还要将数据集划分下训练集、测试集和验证集。自动化分脚本:convert_to_txt.py文件
import os
import random
trainval_percent = 0.1
train_percent = 0.9
xmlfilepath = 'F:/process/ssd_kerasV2-master/videos/照片_samll/照片'
txtsavepath = 'VOCdevkit/VOC2007/ImageSets/Main'
total_xml = os.listdir(xmlfilepath)
num = len(total_xml)
list = range(num)
tv = int(num * trainval_percent)
tr = int(tv * train_percent)
trainval = random.sample(list, tv)
train = random.sample(trainval, tr)
ftrainval = open('VOCdevkit/VOC2007/ImageSets/Main/trainval.txt', 'w')
ftest = open('VOCdevkit/VOC2007/ImageSets/Main/test.txt', 'w')
ftrain = open('VOCdevkit/VOC2007/ImageSets/Main/train.txt', 'w')
fval = open('VOCdevkit/VOC2007/ImageSets/Main/val.txt', 'w')
for i in list:
name = total_xml[i][:-4] + '\n'
if i in trainval:
ftrainval.write(name)
if i in train:
ftest.write(name)
else:
fval.write(name)
else:
ftrain.write(name)
ftrainval.close()
ftrain.close()
fval.close()
ftest.close()
执行完毕之后,Main文件下面生成
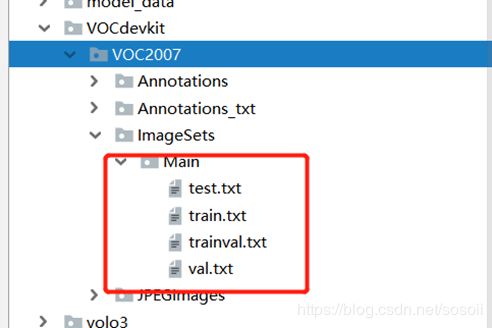
其中,训练集train.txt 文件中每行包含一个图片的名字,共有20*train_percent行名字。
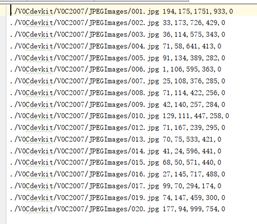
1.4 转换标注数据文件
YOLO采用的标注数据文件,每一行由文件所在路径、标注框的位置(左上角、右下角)、类别ID组成,格式为:image_file_path x_min, y_min,x_max, y_max, class_id

这种文件格式跟前面制作好的VOC_2007标注文件的格式不一样,Keras-yolo3里面提供了voc格式转yolo格式的转换脚本 voc_annotation.py(代码本人已经更改,可根据实际情况进行调整)。在转换格式之前,先打开voc_annotation.py文件,修改里面的classes的值。例如本案例在voc_2007中标注的汽车的物体命名为car,因此voc_annotation.py修改为:
import xml.etree.ElementTree as ET
from os import getcw
sets=[('2007', 'train'), ('2007', 'val'), ('2007', 'test')]
classes = ["car"]
执行完毕之后,自动生成2007_train.txt文件

二 训练模型
2.1 修改参数文件yolo3.cfg
注明一下,这个文件是用于转换官网下载的.weights文件用的。
训练自己的网络可以不用此操作。
IDE里直接打开cfg文件,ctrl+f搜 yolo,总共搜出3个含有yolo的地方!!每个地方都要修改:(这个地方踩了好几次的坑)
[convolutional]
filters:3*(5+len(classes));
[yolo]
classes: len(classes) = 1,这里只有汽车一个类别,所以写成1.
random:原来是1,显存小改为0

2.2 下载预训练模型并转换权重文件
YOLO官网上提供了YOLOv3模型训练好的权重文件,把它下载保存到电脑上。
如果预训练的数据集与yolov3中类别相差太大,不准备进行迁移学习,可以训练新类别的权重,可不下载此权重。
下载地址: https://pjreddie.com/media/files/yolov3.weights
如果要用预训练的权重继续训练,执行以下代码,将权重却换成keras识别的模式:
python convert.py yolov3.cfg yolov3.weights model_data/yolo.h5
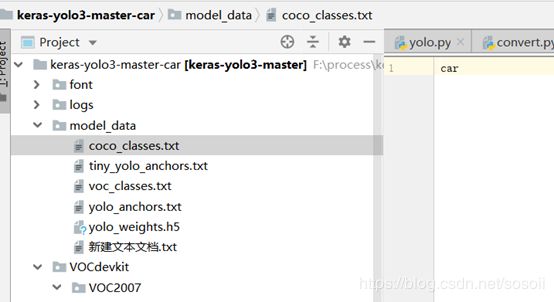
2.3 创建类别文件
将coco-classes.txt和voc_classes.txt中的类别修改为自己的类别,如本次训练模型是汽车-car,

2.4 训练模型
接下来到了关键的步骤:训练模型。首先,修改train.py里面的相关路径配置,主要有:annotation_path、classes_path、weights_path。
def _main():
annotation_path = '2007_train.txt'
log_dir = 'logs/000/'
classes_path = 'model_data/coco_classes.txt'
anchors_path = 'model_data/yolo_anchors.txt'
class_names = get_classes(classes_path)
num_classes = len(class_names)
anchors = get_anchors(anchors_path)
原train.py中有加载预训练权重的代码,并冻结部分层数,在此基础上进行训练。然后执行train.py就可以开始进行训练。训练后的模型,默认保存路径为logs/000/trained_weights_final.h5。
2.5 测试模型
完成模型的训练之后,调用yolo.py即可使用我们训练好的模型。首先,修改yolo.py里面的模型路径、类别文件路径,如下:
class YOLO(object):
_defaults = {
"model_path": 'logs/000/trained_weights_final.h5',
# "model_path": 'model_data/yolo_weights.h5',
"anchors_path": 'model_data/yolo_anchors.txt',
"classes_path": 'model_data/coco_classes.txt',
"score" : 0.3,
"iou" : 0.45,
"model_image_size" : (416, 416),
"gpu_num" : 1,
}
通过调用 YOLO类就能使用YOLO模型,为方便测试,在yolo.py最后增加以下代码,只要修改图像路径后,就能使用自己的yolo模型了
if __name__ == '__main__':
yolo=YOLO()
path = 'F:/process/keras-yolo3-master/VOCdevkit/VOC2007/JPEGImages/DJI_0003.JPG'
# path = 'test1.JPG'
try:
image = Image.open(path)
except:
print('Open Error! Try again!')
else:
r_image = yolo.detect_image(image)
r_image.show()
Keras-YOLOv3中,r_image,_=yolo.detect_image(image)出现’JpegImageFile’ object is not iterable错误,修改为r_image=yolo.detect_image(image)即可。

2.6 补充—训练全新权重
除了以上汽车数据集之外,还有一部份专业领域的图像,因为与原有的yolov3训练集差异太大,所以基本YOLOV3第一阶段的迁移学习阶段对之后的训练过程无用,则直接开始第二段或者重新根据darknet53。
"""
Retrain the YOLO model for your own dataset.
"""
import numpy as np
import keras.backend as K
from keras.layers import Input, Lambda
from keras.models import Model
from keras.callbacks import TensorBoard, ModelCheckpoint, EarlyStopping
from yolo3.model import preprocess_true_boxes, yolo_body, tiny_yolo_body, yolo_loss
from yolo3.utils import get_random_data
def _main():
annotation_path = '2007_train.txt'
log_dir = 'logs/000/'
classes_path = 'model_data/coco_classes.txt'
anchors_path = 'model_data/yolo_anchors.txt'
class_names = get_classes(classes_path)
anchors = get_anchors(anchors_path)
input_shape = (416, 416) # multiple of 32, hw
model = create_model(input_shape, anchors, len(class_names))
train(model, annotation_path, input_shape, anchors, len(class_names), log_dir=log_dir)
def train(model, annotation_path, input_shape, anchors, num_classes, log_dir='logs/'):
model.compile(optimizer='adam', loss={
'yolo_loss': lambda y_true, y_pred: y_pred})
logging = TensorBoard(log_dir=log_dir)
checkpoint = ModelCheckpoint(log_dir + "ep{epoch:03d}-loss{loss:.3f}-val_loss{val_loss:.3f}.h5",
monitor='val_loss', save_weights_only=True, save_best_only=True, period=1)
batch_size = 10
val_split = 0.1
with open(annotation_path) as f:
lines = f.readlines()
np.random.shuffle(lines)
num_val = int(len(lines) * val_split)
num_train = len(lines) - num_val
print('Train on {} samples, val on {} samples, with batch size {}.'.format(num_train, num_val, batch_size))
model.fit_generator(data_generator_wrap(lines[:num_train], batch_size, input_shape, anchors, num_classes),
steps_per_epoch=max(1, num_train // batch_size),
validation_data=data_generator_wrap(lines[num_train:], batch_size, input_shape, anchors,
num_classes),
validation_steps=max(1, num_val // batch_size),
epochs=2,
initial_epoch=1)
model.save_weights(log_dir + 'trained_weights.h5')
def get_classes(classes_path):
with open(classes_path) as f:
class_names = f.readlines()
class_names = [c.strip() for c in class_names]
return class_names
def get_anchors(anchors_path):
with open(anchors_path) as f:
anchors = f.readline()
anchors = [float(x) for x in anchors.split(',')]
return np.array(anchors).reshape(-1, 2)
def create_model(input_shape, anchors, num_classes, load_pretrained=False, freeze_body=False,
weights_path='model_data/yolo_weights.h5'):
K.clear_session() # get a new session
image_input = Input(shape=(None, None, 3))
h, w = input_shape
num_anchors = len(anchors)
y_true = [Input(shape=(h // {0: 32, 1: 16, 2: 8}[l], w // {0: 32, 1: 16, 2: 8}[l], \
num_anchors // 3, num_classes + 5)) for l in range(3)]
model_body = yolo_body(image_input, num_anchors // 3, num_classes)
print('Create YOLOv3 model with {} anchors and {} classes.'.format(num_anchors, num_classes))
if load_pretrained:
model_body.load_weights(weights_path, by_name=True, skip_mismatch=True)
print('Load weights {}.'.format(weights_path))
if freeze_body:
# Do not freeze 3 output layers.
num = len(model_body.layers) - 3
for i in range(num): model_body.layers[i].trainable = False
print('Freeze the first {} layers of total {} layers.'.format(num, len(model_body.layers)))
model_loss = Lambda(yolo_loss, output_shape=(1,), name='yolo_loss',
arguments={'anchors': anchors, 'num_classes': num_classes, 'ignore_thresh': 0.5})(
[*model_body.output, *y_true])
model = Model([model_body.input, *y_true], model_loss)
return model
def data_generator(annotation_lines, batch_size, input_shape, anchors, num_classes):
n = len(annotation_lines)
np.random.shuffle(annotation_lines)
i = 0
while True:
image_data = []
box_data = []
for b in range(batch_size):
i %= n
image, box = get_random_data(annotation_lines[i], input_shape, random=True)
image_data.append(image)
box_data.append(box)
i += 1
image_data = np.array(image_data)
box_data = np.array(box_data)
y_true = preprocess_true_boxes(box_data, input_shape, anchors, num_classes)
yield [image_data, *y_true], np.zeros(batch_size)
def data_generator_wrap(annotation_lines, batch_size, input_shape, anchors, num_classes):
n = len(annotation_lines)
if n == 0 or batch_size <= 0: return None
return data_generator(annotation_lines, batch_size, input_shape, anchors, num_classes)
if __name__ == '__main__':
_main()