tensorflow tutorials(十):用tensorflow实现降噪自编码器(Denoising Auto-Encoder)
声明:版权所有,转载请联系作者并注明出处: http://blog.csdn.net/u013719780?viewmode=contents
降噪自编码器是Pascal Vincent提出来的,有兴趣的童鞋可以看Pascal Vincent的论文原文Stacked Denoising Autoencoders: Learning Useful Representations in a Deep Network with a Local Denoising Criterion。DAE的核心思想是,一个能够从中恢复出原始信号的表达未必是最好的,能够对“被污染”的原始数据编码、解码,然后还能恢复真正的原始数据,这样的特征才是好的。
DENOISING AUTO ENCODER
In [1]:
import numpy as np
import tensorflow as tf
import matplotlib.pyplot as plt
from tensorflow.examples.tutorials.mnist import input_data
%matplotlib inline
print ("PACKAGES LOADED")
MNIST
In [2]:
mnist = input_data.read_data_sets('/tmp/data/', one_hot=True)
train_X = mnist.train.images
train_Y = mnist.train.labels
test_X = mnist.test.images
test_Y = mnist.test.labels
print ("MNIST ready")
DEFINE NETWORK
In [3]:
# NETOWRK PARAMETERS
n_input = 784
n_hidden_1 = 256
n_hidden_2 = 256
n_output = 784
# PLACEHOLDERS
x = tf.placeholder("float", [None, n_input])
y = tf.placeholder("float", [None, n_output])
dropout_keep_prob = tf.placeholder("float")
# WEIGHTS
weights = {
'h1': tf.Variable(tf.random_normal([n_input, n_hidden_1])),
'h2': tf.Variable(tf.random_normal([n_hidden_1, n_hidden_2])),
'out': tf.Variable(tf.random_normal([n_hidden_2, n_output]))
}
biases = {
'b1': tf.Variable(tf.random_normal([n_hidden_1])),
'b2': tf.Variable(tf.random_normal([n_hidden_2])),
'out': tf.Variable(tf.random_normal([n_output]))
}
# MODEL
def denoise_auto_encoder(_X, _weights, _biases, _keep_prob):
layer_1 = tf.nn.sigmoid(tf.add(tf.matmul(_X, _weights['h1']), _biases['b1']))
layer_1out = tf.nn.dropout(layer_1, _keep_prob)
layer_2 = tf.nn.sigmoid(tf.add(tf.matmul(layer_1out, _weights['h2']), _biases['b2']))
layer_2out = tf.nn.dropout(layer_2, _keep_prob)
return tf.nn.sigmoid(tf.matmul(layer_2out, _weights['out']) + _biases['out'])
# MODEL AS A FUNCTION
reconstruction = denoise_auto_encoder(x, weights, biases, dropout_keep_prob)
print ("NETOWRK READY")
DEFINE FUNCTIONS
In [4]:
# COST
cost = tf.reduce_mean(tf.pow(reconstruction-y, 2))
# OPTIMIZER
optm = tf.train.AdamOptimizer(0.01).minimize(cost)
# INITIALIZER
init = tf.initialize_all_variables()
print ("FUNCTIONS READY")
DEFINE SAVER
In [5]:
savedir = "tmp/"
saver = tf.train.Saver(max_to_keep=1)
print ("SAVER READY")
TRAIN
In [6]:
TRAIN_FLAG = 1
epochs = 50
batch_size = 100
disp_step = 10
sess = tf.Session()
sess.run(init)
if TRAIN_FLAG:
print ("START OPTIMIZATION")
for epoch in range(epochs):
num_batch = int(mnist.train.num_examples/batch_size)
total_cost = 0.
for i in range(num_batch):
batch_xs, batch_ys = mnist.train.next_batch(batch_size)
batch_xs_noisy = batch_xs + 0.3*np.random.randn(batch_size, 784)
feeds = {x: batch_xs_noisy, y: batch_xs, dropout_keep_prob: 1.}
sess.run(optm, feed_dict=feeds)
total_cost += sess.run(cost, feed_dict=feeds)
# DISPLAY
if epoch % disp_step == 0:
print ("Epoch %02d/%02d average cost: %.6f"
% (epoch, epochs, total_cost/num_batch))
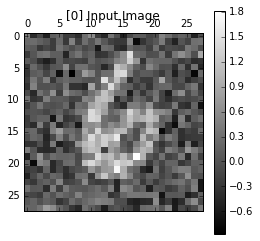
# PLOT
randidx = np.random.randint(test_X.shape[0], size=1)
testvec = test_X[randidx, :]
noisyvec = testvec + 0.3*np.random.randn(1, 784)
outvec = sess.run(reconstruction, feed_dict={x: testvec, dropout_keep_prob: 1.})
outimg = np.reshape(outvec, (28, 28))
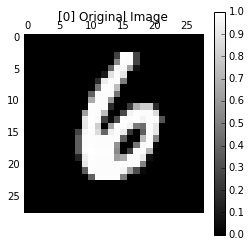
# Plot
plt.matshow(np.reshape(testvec, (28, 28)), cmap=plt.get_cmap('gray'))
plt.title("[" + str(epoch) + "] Original Image")
plt.colorbar()
plt.show()
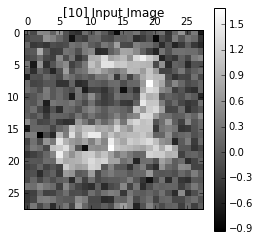
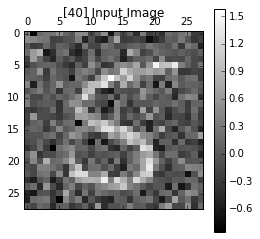
plt.matshow(np.reshape(noisyvec, (28, 28)), cmap=plt.get_cmap('gray'))
plt.title("[" + str(epoch) + "] Input Image")
plt.colorbar()
plt.show()
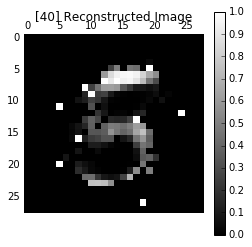
plt.matshow(outimg, cmap=plt.get_cmap('gray'))
plt.title("[" + str(epoch) + "] Reconstructed Image")
plt.colorbar()
plt.show()
# SAVE
saver.save(sess, savedir + 'denoise_auto_encoder.ckpt', global_step=epoch)
print ("OPTIMIZATION FINISHED")






In [9]:
# Restore
load_epoch = 49
saver.restore(sess, "tmp/denoise_auto_encoder.ckpt-" + str(load_epoch))
In [10]:
# Test one
randidx = np.random.randint(test_X.shape[0], size=1)
orgvec = test_X[randidx, :]
testvec = test_X[randidx, :]
label = np.argmax(test_Y[randidx, :], 1)
print ("label is %d" % (label))
# Noise type
ntype = 2 # 1: Gaussian Noise, 2: Salt and Pepper Noise
if ntype is 1:
print ("Gaussian Noise")
noisyvec = testvec + 0.3*np.random.randn(1, 784)
else:
print ("Salt and Pepper Noise")
noisyvec = testvec
rate = 0.15
noiseidx = np.random.randint(test_X.shape[1]
, size=int(test_X.shape[1]*rate))
noisyvec[0, noiseidx] = 1-noisyvec[0, noiseidx]
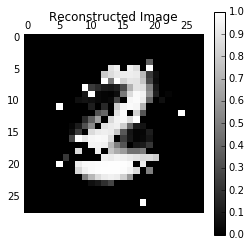
outvec = sess.run(reconstruction, feed_dict={x: noisyvec, dropout_keep_prob: 1})
outimg = np.reshape(outvec, (28, 28))
# Plot
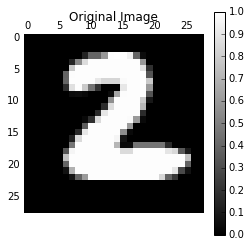
plt.matshow(np.reshape(orgvec, (28, 28)), cmap=plt.get_cmap('gray'))
plt.title("Original Image")
plt.colorbar()
plt.matshow(np.reshape(noisyvec, (28, 28)), cmap=plt.get_cmap('gray'))
plt.title("Input Image")
plt.colorbar()
plt.matshow(outimg, cmap=plt.get_cmap('gray'))
plt.title("Reconstructed Image")
plt.colorbar()
plt.show()

In [11]:
# Visualize Filter
from PIL import Image
def scale_to_unit_interval(ndar, eps=1e-8):
""" Scales all values in the ndarray ndar to be between 0 and 1 """
ndar = ndar.copy()
ndar -= ndar.min()
ndar *= 1.0 / (ndar.max() + eps)
return ndar
def tile_raster_images(X, img_shape, tile_shape, tile_spacing=(0, 0),
scale_rows_to_unit_interval=True,
output_pixel_vals=True):
assert len(img_shape) == 2
assert len(tile_shape) == 2
assert len(tile_spacing) == 2
out_shape = [(ishp + tsp) * tshp - tsp for ishp, tshp, tsp
in zip(img_shape, tile_shape, tile_spacing)]
if isinstance(X, tuple):
assert len(X) == 4
# Create an output numpy ndarray to store the image
if output_pixel_vals:
out_array = np.zeros((out_shape[0], out_shape[1], 4), dtype='uint8')
else:
out_array = np.zeros((out_shape[0], out_shape[1], 4), dtype=X.dtype)
#colors default to 0, alpha defaults to 1 (opaque)
if output_pixel_vals:
channel_defaults = [0, 0, 0, 255]
else:
channel_defaults = [0., 0., 0., 1.]
for i in range(4):
if X[i] is None:
# if channel is None, fill it with zeros of the correct
# dtype
out_array[:, :, i] = np.zeros(out_shape,
dtype='uint8' if output_pixel_vals else out_array.dtype
) + channel_defaults[i]
else:
# use a recurrent call to compute the channel and store it
# in the output
out_array[:, :, i] = tile_raster_images(X[i], img_shape, tile_shape, tile_spacing, scale_rows_to_unit_interval, output_pixel_vals)
return out_array
else:
# if we are dealing with only one channel
H, W = img_shape
Hs, Ws = tile_spacing
# generate a matrix to store the output
out_array = np.zeros(out_shape, dtype='uint8' if output_pixel_vals else X.dtype)
for tile_row in range(tile_shape[0]):
for tile_col in range(tile_shape[1]):
if tile_row * tile_shape[1] + tile_col < X.shape[0]:
if scale_rows_to_unit_interval:
# if we should scale values to be between 0 and 1
# do this by calling the `scale_to_unit_interval`
# function
this_img = scale_to_unit_interval(X[tile_row * tile_shape[1] + tile_col].reshape(img_shape))
else:
this_img = X[tile_row * tile_shape[1] + tile_col].reshape(img_shape)
# add the slice to the corresponding position in the
# output array
out_array[
tile_row * (H+Hs): tile_row * (H + Hs) + H,
tile_col * (W+Ws): tile_col * (W + Ws) + W
] \
= this_img * (255 if output_pixel_vals else 1)
return out_array
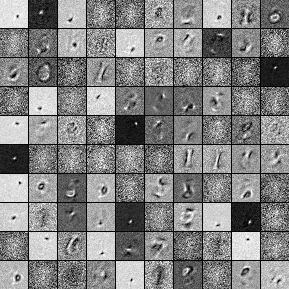
# Visualize filter
w1 = sess.run(weights["h1"])
image = Image.fromarray(tile_raster_images(
X = w1.T,
img_shape=(28, 28), tile_shape=(10, 10),
tile_spacing=(1, 1)))
image
Out[11]: