TensorFlow实现AlexNet(forward和backward耗时计算)
AlexNet主要使用到的技术点:
一、使用ReLU作为CNN激活函数,成功解决了Sigmoid在网络较深时的梯度弥撒问题。
二、训练时使用Dropout随机忽略一部分神经元,以避免模型过拟合。(AlexNet中主要在最后几个全连接层使用Dropout)
三、AlexNet全部使用最大池化,避免平均池化的模糊化效果。并且AlexNet提出让步长比池化核的尺寸小,这样池化层的输出之间会有重叠和覆盖,提升了特征的丰富性。
四、提出LRN层,对局部神经元的活动创建竞争机制,使得其中响应比较大的值变得相对更大,并抑制其他反馈较小的神经元,提升了的模型的泛化能力。
五、使用CUDA加速深度卷积网络的训练。
六、数据增强。随机地从256*256的原始图像中截取224*224大小的区域(以及水平翻转的镜像),相当于增加了(256-224)*(256-224)*2=2048倍的数据量。数据增强后可以大大减轻过拟合,提升泛化能力。进行预测时,则是取图片的四个角加中间共五个位置,并进行左右翻转,一共获得10张图片,对他们进行预测并对10次结果求平均值。另外,对图像的RGB数据进行PCA处理,并对主成分做一个标准差为0.1的高斯扰动(具有高斯分布的随机扰动),增加一些噪声,这个Trick可以让错误率再下降1%。
备注:AlexNet需要训练参数的层是卷积层和全连接层(不包括池化层和LRN)。卷积层有用的地方就是可以通过较小的参数量提取有效的特征。
(由于考虑到耗时原因)本文会建立一个完整的AlexNet卷积神经网络,然后对它每个batch的前馈计算(forward)和反馈计算(backward)的速度进行测试。使用随机图片数据计算每轮前馈、反馈的平均耗时。
# coding:UTF-8
# 每个batch的forward和backward进行速度测试
# 首先导入接下来会用到的几个系统库
from __future__ import absolute_import
from __future__ import division
from __future__ import print_function
import argparse
from datetime import datetime
import math
import sys
import time
from six.moves import xrange # pylint: disable=redefined-builtin
import tensorflow as tf
# 共测试100个batch的数据
# batch_size = 32
# num_batches = 100
FLAGS = None
# 展示每一个卷积层或池化层输出的Tensor。
# 函数接受一个tensor作为输入,并显示其名称(t.op.name)和尺寸(t.get_shape().as_list())
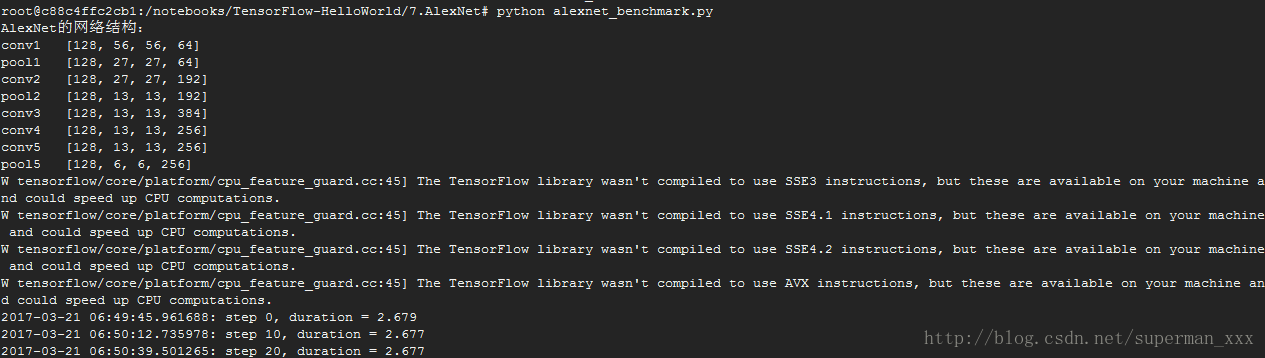
print ('AlexNet的网络结构:')
def print_activations(t):
print(t.op.name, ' ', t.get_shape().as_list())
########设计AlexNet网络结构########
def inference(images):
# images: Images Tensor
# Reurn:
# pool5: 返回最后一层(第五个池化层)
# parameters: 返回AlexNet中所有需要训练的模型参数
parameters = []
# conv1
with tf.name_scope('conv1') as scope: # 将scope内生成的Variable自动命名为conv1/xxx,区分不同卷积层之间的组件。
kernel = tf.Variable(tf.truncated_normal([11, 11, 3, 64], dtype=tf.float32, # 截断的正太分布初始化卷积核
stddev=1e-1), name='weights') # 标准差0.1、尺寸11*11,颜色通道3,数量64
conv = tf.nn.conv2d(images, kernel, [1, 4, 4, 1], padding='SAME') # 对输入images完成卷积操作,strides为4*4
biases = tf.Variable(tf.constant(0.0, shape=[64], dtype=tf.float32),
trainable=True, name='biases')
bias = tf.nn.bias_add(conv, biases)
conv1 = tf.nn.relu(bias, name=scope) # 非线性处理
print_activations(conv1) # 将这层输出tensor conv1的结构打印出来
parameters += [kernel, biases] # 将这层可训练的参数kernel、biases添加到parameters中
# lrn1
# 考虑到LRN层效果不明显,而且会让forward和backwood的速度大大下降所以没有添加
# pool1
pool1 = tf.nn.max_pool(conv1,
ksize=[1, 3, 3, 1], # 这里池化尺寸为3*3,即将3*3的像素块降为1*1
strides=[1, 2, 2, 1], # 取样步长2*2,步长比池化尺寸小,提高特征的丰富性
padding='VALID', # 即取样时不能超过边框(SAME模式填充边界外的点)
name='pool1') #
print_activations(pool1) # 输出结果pool1的结构打印
# conv2
with tf.name_scope('conv2') as scope:
kernel = tf.Variable(tf.truncated_normal([5, 5, 64, 192], dtype=tf.float32,
stddev=1e-1), name='weights')
conv = tf.nn.conv2d(pool1, kernel, [1, 1, 1, 1], padding='SAME') # 步长为1,即扫描全图
biases = tf.Variable(tf.constant(0.0, shape=[192], dtype=tf.float32),
trainable=True, name='biases')
bias = tf.nn.bias_add(conv, biases)
conv2 = tf.nn.relu(bias, name=scope)
parameters += [kernel, biases]
print_activations(conv2)
# pool2
pool2 = tf.nn.max_pool(conv2,
ksize=[1, 3, 3, 1], # 设置与上一层相同
strides=[1, 2, 2, 1],
padding='VALID',
name='pool2')
print_activations(pool2)
# conv3
with tf.name_scope('conv3') as scope:
kernel = tf.Variable(tf.truncated_normal([3, 3, 192, 384],
dtype=tf.float32,
stddev=1e-1), name='weights')
conv = tf.nn.conv2d(pool2, kernel, [1, 1, 1, 1], padding='SAME') # 步长为1,即扫描全图
biases = tf.Variable(tf.constant(0.0, shape=[384], dtype=tf.float32),
trainable=True, name='biases')
bias = tf.nn.bias_add(conv, biases)
conv3 = tf.nn.relu(bias, name=scope)
parameters += [kernel, biases]
print_activations(conv3)
# conv4
with tf.name_scope('conv4') as scope:
kernel = tf.Variable(tf.truncated_normal([3, 3, 384, 256],
dtype=tf.float32,
stddev=1e-1), name='weights')
conv = tf.nn.conv2d(conv3, kernel, [1, 1, 1, 1], padding='SAME')
biases = tf.Variable(tf.constant(0.0, shape=[256], dtype=tf.float32),
trainable=True, name='biases')
bias = tf.nn.bias_add(conv, biases)
conv4 = tf.nn.relu(bias, name=scope)
parameters += [kernel, biases]
print_activations(conv4)
# conv5
with tf.name_scope('conv5') as scope:
kernel = tf.Variable(tf.truncated_normal([3, 3, 256, 256],
dtype=tf.float32,
stddev=1e-1), name='weights')
conv = tf.nn.conv2d(conv4, kernel, [1, 1, 1, 1], padding='SAME')
biases = tf.Variable(tf.constant(0.0, shape=[256], dtype=tf.float32),
trainable=True, name='biases')
bias = tf.nn.bias_add(conv, biases)
conv5 = tf.nn.relu(bias, name=scope)
parameters += [kernel, biases]
print_activations(conv5)
# pool5
pool5 = tf.nn.max_pool(conv5,
ksize=[1, 3, 3, 1],
strides=[1, 2, 2, 1],
padding='VALID',
name='pool5')
print_activations(pool5)
return pool5, parameters # 返回最后一层pool5的结果及所有需要训练的模型参数
########评估AlexNet每轮计算时间########
def time_tensorflow_run(session, target, info_string):
# Args:
# session:the TensorFlow session to run the computation under.
# target:需要评测的运算算子。
# info_string:测试名称。
num_steps_burn_in = 10 # 先定义预热轮数(头几轮跌代有显存加载、cache命中等问题因此可以跳过,只考量10轮迭代之后的计算时间)
total_duration = 0.0 # 记录总时间
total_duration_squared = 0.0 # 总时间平方和 -----用来后面计算方差
for i in xrange(FLAGS.num_batches + num_steps_burn_in): # 迭代轮数
start_time = time.time() # 记录时间
_ = session.run(target) # 每次迭代通过session.run(target)
duration = time.time() - start_time #
if i >= num_steps_burn_in:
if not i % 10:
print ('%s: step %d, duration = %.3f' %
(datetime.now(), i - num_steps_burn_in, duration))
total_duration += duration # 累加便于后面计算每轮耗时的均值和标准差
total_duration_squared += duration * duration
mn = total_duration / FLAGS.num_batches # 每轮迭代的平均耗时
vr = total_duration_squared / FLAGS.num_batches - mn * mn #
sd = math.sqrt(vr) # 标准差
print ('%s: %s across %d steps, %.3f +/- %.3f sec / batch' %
(datetime.now(), info_string, FLAGS.num_batches, mn, sd))
########定义主函数########
def run_benchmark():
"""Run the benchmark on AlexNet."""
with tf.Graph().as_default(): # 定义默认的Graph方便后面使用
image_size = 224 # 图片尺寸
images = tf.Variable(tf.random_normal([FLAGS.batch_size, # batch大小
image_size,
image_size, 3], # 第四个维度是颜色通道数
dtype=tf.float32,
stddev=1e-1)) # 使用tf.random_normal函数构造正态分布(标准差0.1)的随机tensor
# inference model.
pool5, parameters = inference(images) # 使用前面定义的inference函数构建整个AlexNet网络(得到pool5和parameters集合)
# Build an initialization operation.
init = tf.global_variables_initializer()
# 创建新的session并且通过上面一条语句初始化参数
sess = tf.Session()
sess.run(init)
# Run the forward benchmark.
time_tensorflow_run(sess, pool5, "Forward")
# Add a simple objective so we can calculate the backward pass.设置优化目标loss
objective = tf.nn.l2_loss(pool5)
# Compute the gradient with respect to all the parameters.根据梯度更新参数
grad = tf.gradients(objective, parameters)
# Run the backward benchmark.
time_tensorflow_run(sess, grad, "Forward-backward")
def main(_):
run_benchmark()
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument(
'--batch_size',
type=int,
default=128,
help='Batch size.'
)
parser.add_argument(
'--num_batches',
type=int,
default=100,
help='Number of batches to run.'
)
FLAGS, unparsed = parser.parse_known_args()
tf.app.run(main=main, argv=[sys.argv[0]] + unparsed)
CNN的训练过程backword通常比较耗时,而不像预测过程forward。
深度学习的参数并不一定比传统的机器学习模型多,尤其卷积层使用的参数量其实很少,但是其抽取特征的能力是非常强的,这也是CNN之所以有效的原因。