凸包算法分析
toleft:
对于toleft的计算,是通过叉积的定义来进行的,叉积代表面积,且方向为顺时针,那么如果大于0,则认为k在ab向量的左边.
对于2个向量a(x1,y1),b(x2,y2),将其进行行列式的计算,第三维补0,计算过程如下:
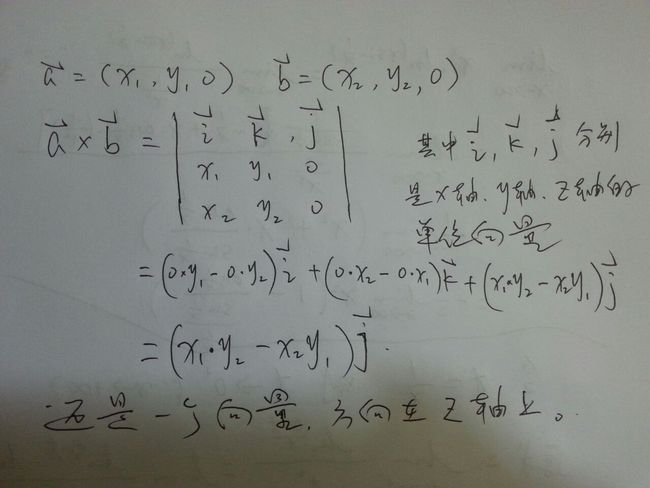
而2个二维向量可以由3个点a(x1,y1),b(x2,y2),k(x3,y3)相减得到,然后我们可以得到计算公式:
//通过向量叉乘符号来进行定义 ,必须严格大于0,在一条线上的也不算left
bool toleft(Point a, Point b, Point k)
{
return (a.x * b.y - a.y * b.x + b.x * k.y - b.y * k.x + k.x * a.y - k.y * a.x) > 0 ? true : false;
}in_triangle:
有了toleft(),我们可以进行点是否在多边形内的判断,比如三角形的话,点在内部则3对3边顺时针进行toleft测试要么都在左要么都在右。
bool in_triangle(Point a, Point b, Point c, Point k)
{
bool r1 = toleft(a, b, k);
bool r2 = toleft(b, c, k);
bool r3 = toleft(c, a, k);
return (r1 == r2) && (r1 == r3);
}我们进行凸包的计算,算法有多种,从O(n^4) ~ O(nlogn)
一、EP(extreme point)算法(O(n^4))
极点:不被任何图形内点构成的三角形所包含的点为极点,通过排除法来找极点。步骤:
1. 全部点表为极点
2. 对每一个点,通过对每个可能的三角形进行in_triangle测试,如果没有一个三角形能包含此点,那么此为极点,否则标记为非极点。

二、EE(extreme edge)极边算法(O(n^3))
极边:图中所有点都在其一侧的边称为极边,可以通过toleft测试判断。步骤:
1、对图中每一条边,对除构成此边2点的其他点进行toleft测试,如果全为false或者全为true,证明所有点都在其一侧,标记为极边。
//返回extreme edge的个数
int EE(Point *a, Point *res, int num)
{
int res_count = 0;
for (int i = 0; i < num; i++)
for (int j = i + 1; j < num; j++)
{
bool flag;
int count = 0,result = 0;
for (int k = 0; k < num ; k++)
{
if (k == i || k == j)
continue;
if (count == 0)//第一个点,确定左右
{
flag = toleft(a[i], a[j], a[k]);
count++;
}
else if (flag != toleft(a[i], a[j], a[k]))//有一个点与前面点不同
{
result = 1;
break;
}
}
if (result == 0)//证明全部点都在a[i] a[j]边的一边
{
res[res_count++] = a[i];
res[res_count++] = a[j];
}
}
return res_count / 2;
}三、Javis march(O(hn))
根据EE的想法,我们可以想到一个凸包所有的边都是连着的,那么在找到一条边之后我们可以顺着其中的顶点继续向下找,而不用将所有的边都进行遍历。步骤:
1. 找到最左下的点LTD->p_now
2. 从p_now出发找到第一条极边FEE,并将另一个顶点赋为p_now
3. 不断重复2步骤,直到p_now = LTD,算法结束
//Jarvis Marching
int JM(Point *a, Point *res, int num)
{
int min_x = INF,min_loc,min_y;
//find ltl(最左下) Point to be the first element in stack s
for (int i = 0; i < num; i++)
if (a[i].x < min_x)
{
min_x = a[i].x;
min_y = a[i].y;
min_loc = i;
}
else if (a[i].x == min_x && a[i].y < min_y)//横坐标一样,取纵坐标小的那个
{
min_x = a[i].x;
min_y = a[i].y;
min_loc = i;
}
//将p1得到并放到第一个的位置,这样好操作
int flag = min_loc,end = flag;
int count = 0;
res[count++] = a[min_loc];
while (flag != end || count == 1)
{
int right_most;//为了防止right_most == flag.
if (flag == num - 1)
right_most = flag - 1;
else
right_most = flag + 1;
for (int i = 0; i < num; i++)//找到a[flag]点最右下的点,那么就是其下一个点,扫一遍即可,一直往toleft的反方向扫
{
if (i == right_most || i == flag )
continue;
if (!toleft(a[flag], a[right_most], a[i]))//证明a[i]比a[right_most]还要右下
right_most = i;
}
res[count++] = a[right_most];
flag = right_most;
}
return count;
}算法复杂度为O(hn),其中h为凸包中点的个数,此算法当h很小(即大部分点全在凸包内)的时候可以认为其为O(n),当h很大的时候(如点全部都在凸包上)则为O(n^2),是一个和最终结果相关的算法。
四、grahamscan(O(nlogn)):
算法步骤
1. 找到最左下的那个点LTD
2. 将剩余点根据与LTD点的角度大小从小到大排序(一般算tan的值)
3. 按照排序后的序列每次找到最右边的点(这个通过2个栈+toleft测试来实现)
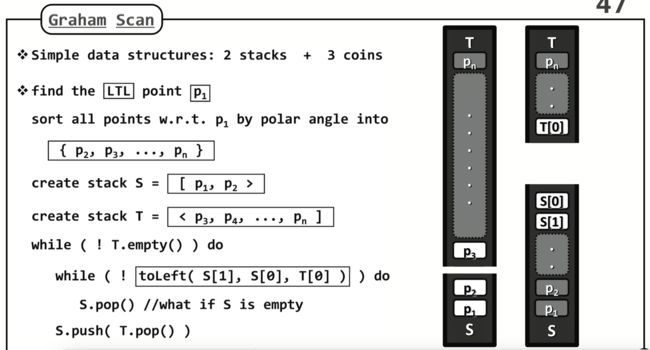
int graham_scan(Point *a, Point *res, int num)
{
stack算法复杂度主要集中在排序过程中为O(nlogn)。如果不排序直接乱序进行toleft测试的话,会出问题,比如:
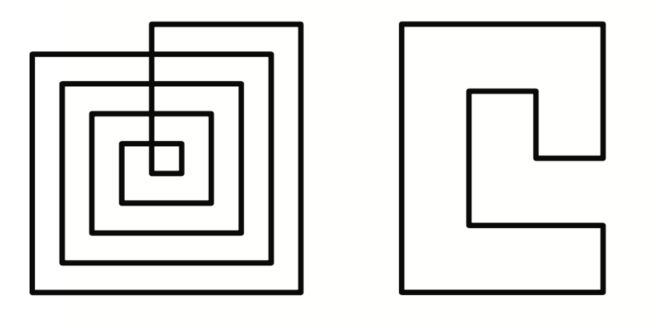
如果按照上面的图形的顺序(顺时针)进行grahamscan的话,那么找出来的凸包会就是原图形,所以不经过犄角排序是不行的。