kalibr 标定记录
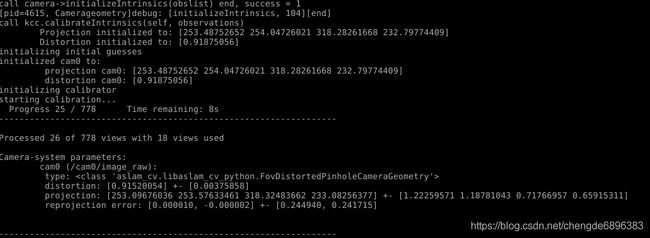
1.标定成功的中间过程
2. 标定失败的中间过程
2.1 由于没有一张完整的apriltag角点检测,故在做initialization of focal length的时候失败
2.2 去掉一张完整的apriltag角点检测约束之后,由于内参估计错误导致的优化失败
使用全角点检测来估计相机的fx/fy 记录:
f_guess = 297.717
[pid=3208, PinholeProjection
f_guess = 308.068
[pid=3208, PinholeProjection
f_guess = 295.569
[pid=3208, PinholeProjection
f_guess = 301.168
[pid=3208, PinholeProjection
f_guess = 301.931
[pid=3208, PinholeProjection
f_guess = 301.151
[pid=3208, PinholeProjection
f_guess = 294.229
[pid=3208, PinholeProjection
f_guess = 299.451
[pid=3208, PinholeProjection
f_guess = 298.4
[pid=3208, PinholeProjection
f_guess = 298.915
[pid=3208, PinholeProjection
f_guess = 298.259
[pid=3208, PinholeProjection
f_guess = 353.848
[pid=3208, PinholeProjection
f_guess = 293.897
[pid=3208, PinholeProjection
f_guess = 303.496
[pid=3208, PinholeProjection
f_guess = 303.71
[pid=3208, PinholeProjection
f_guess = 302.451
[pid=3208, PinholeProjection
f_guess = 293.29
[pid=3208, PinholeProjection
f_guess = 299.908
[pid=3208, PinholeProjection
f_guess = 298.548
[pid=3208, PinholeProjection
f_guess = 299.16
[pid=3208, PinholeProjection
f_guess = 298.353
[pid=3208, PinholeProjection
f_guess = 280.891
[pid=3208, PinholeProjection
f_guess = 294.423
[pid=3208, PinholeProjection
f_guess = 298.41
[pid=3208, PinholeProjection
f_guess = 297.632
[pid=3208, PinholeProjection
f_guess = 289.321
[pid=3208, PinholeProjection
f_guess = 296.495
[pid=3208, PinholeProjection
f_guess = 295.735
[pid=3208, PinholeProjection
f_guess = 296.516
[pid=3208, PinholeProjection
f_guess = 296.077
[pid=3208, PinholeProjection
f_guess = 362.035
[pid=3208, PinholeProjection
f_guess = 315.107
[pid=3208, PinholeProjection
f_guess = 310.4
[pid=3208, PinholeProjection
f_guess = 292.972
[pid=3208, PinholeProjection
f_guess = 302.921
[pid=3208, PinholeProjection
f_guess = 300.281
[pid=3208, PinholeProjection
f_guess = 300.996
[pid=3208, PinholeProjection
f_guess = 299.619
[pid=3208, PinholeProjection
f_guess = 304.073
[pid=3208, PinholeProjection
f_guess = 301.115
[pid=3208, PinholeProjection
f_guess = 286.399
[pid=3208, PinholeProjection
f_guess = 297.617
[pid=3208, PinholeProjection
f_guess = 296.252
[pid=3208, PinholeProjection
f_guess = 297.285
[pid=3208, PinholeProjection
f_guess = 296.567
[pid=3208, PinholeProjection
f_guess = 291.516
[pid=3208, PinholeProjection
f_guess = 274.366
[pid=3208, PinholeProjection
f_guess = 293.637
[pid=3208, PinholeProjection
f_guess = 293.246
[pid=3208, PinholeProjection
f_guess = 294.915
[pid=3208, PinholeProjection
f_guess = 294.592
[pid=3208, PinholeProjection
f_guess = 269.805
[pid=3208, PinholeProjection
f_guess = 294.135
[pid=3208, PinholeProjection
f_guess = 293.478
[pid=3208, PinholeProjection
f_guess = 295.325
[pid=3208, PinholeProjection
f_guess = 294.864
[pid=3208, PinholeProjection
f_guess = 495.39
[pid=3208, PinholeProjection
f_guess = 317.663
[pid=3208, PinholeProjection
f_guess = 316.463
[pid=3208, PinholeProjection
f_guess = 307.269
[pid=3208, PinholeProjection
f_guess = 292.609
[pid=3208, PinholeProjection
f_guess = 296.592
[pid=3208, PinholeProjection
f_guess = 295.321
[pid=3208, PinholeProjection
f_guess = 311.368
[pid=3208, PinholeProjection
f_guess = 297.545
[pid=3208, PinholeProjection
f_guess = 293.644
不使用全检测的记录:
由于存在某些丢失的点,在估计fx/fy的时候会出现异常值f_guess = -nan
i = 64, target.rows() = 12, target.cols() = 12
[pid=25469, GridCalibrationTargetObservation]debug: [imageGridPoint, 202][middle]
0, imagepoint fail
[pid=25469, PinholeProjection
[pid=25469, GridCalibrationTargetObservation]debug: [imageGridPoint, 202][middle]
1, imagepoint fail
[pid=25469, PinholeProjection
[pid=25469, GridCalibrationTargetObservation]debug: [imageGridPoint, 202][middle]
2, imagepoint fail
[pid=25469, PinholeProjection
[pid=25469, GridCalibrationTargetObservation]debug: [imageGridPoint, 202][middle]
3, imagepoint fail
[pid=25469, PinholeProjection
[pid=25469, GridCalibrationTargetObservation]debug: [imageGridPoint, 202][middle]
4, imagepoint fail
[pid=25469, PinholeProjection
[pid=25469, GridCalibrationTargetObservation]debug: [imageGridPoint, 202][middle]
5, imagepoint fail
[pid=25469, PinholeProjection
[pid=25469, GridCalibrationTargetObservation]debug: [imageGridPoint, 202][middle]
8, imagepoint fail
[pid=25469, PinholeProjection
[pid=25469, GridCalibrationTargetObservation]debug: [imageGridPoint, 202][middle]
9, imagepoint fail
[pid=25469, PinholeProjection
[pid=25469, GridCalibrationTargetObservation]debug: [imageGridPoint, 202][middle]
10, imagepoint fail
[pid=25469, PinholeProjection
[pid=25469, GridCalibrationTargetObservation]debug: [imageGridPoint, 202][middle]
11, imagepoint fail
[pid=25469, PinholeProjection
[pid=25469, GridCalibrationTargetObservation]debug: [imageGridPoint, 202][middle]
12, imagepoint fail
[pid=25469, PinholeProjection
[pid=25469, GridCalibrationTargetObservation]debug: [imageGridPoint, 202][middle]
13, imagepoint fail
[pid=25469, PinholeProjection
[pid=25469, GridCalibrationTargetObservation]debug: [imageGridPoint, 202][middle]
14, imagepoint fail
[pid=25469, PinholeProjection
[pid=25469, GridCalibrationTargetObservation]debug: [imageGridPoint, 202][middle]
15, imagepoint fail
[pid=25469, PinholeProjection
[pid=25469, GridCalibrationTargetObservation]debug: [imageGridPoint, 202][middle]
16, imagepoint fail
[pid=25469, PinholeProjection
[pid=25469, GridCalibrationTargetObservation]debug: [imageGridPoint, 202][middle]
17, imagepoint fail
[pid=25469, PinholeProjection
[pid=25469, GridCalibrationTargetObservation]debug: [imageGridPoint, 202][middle]
20, imagepoint fail
[pid=25469, PinholeProjection
[pid=25469, GridCalibrationTargetObservation]debug: [imageGridPoint, 202][middle]
21, imagepoint fail
[pid=25469, PinholeProjection
[pid=25469, GridCalibrationTargetObservation]debug: [imageGridPoint, 202][middle]
22, imagepoint fail
[pid=25469, PinholeProjection
[pid=25469, GridCalibrationTargetObservation]debug: [imageGridPoint, 202][middle]
23, imagepoint fail
[pid=25469, PinholeProjection
[pid=25469, PinholeProjection
[pid=25469, PinholeProjection
f_guess = -nan
[pid=25469, PinholeProjection
f_guess = -nan
[pid=25469, PinholeProjection
f_guess = -nan
[pid=25469, PinholeProjection
f_guess = -nan
[pid=25469, PinholeProjection
f_guess = -nan
[pid=25469, PinholeProjection
f_guess = -nan
[pid=25469, PinholeProjection
f_guess = -nan
[pid=25469, PinholeProjection
f_guess = -nan
[pid=25469, PinholeProjection
f_guess = -nan
[pid=25469, PinholeProjection
f_guess = -nan
[pid=25469, PinholeProjection
f_guess = -nan
[pid=25469, PinholeProjection
f_guess = -nan
[pid=25469, PinholeProjection
f_guess = -nan
[pid=25469, PinholeProjection
f_guess = -nan
[pid=25469, PinholeProjection
f_guess = -nan
[pid=25469, PinholeProjection
f_guess = -nan
[pid=25469, PinholeProjection
f_guess = -nan
[pid=25469, PinholeProjection
f_guess = -nan
[pid=25469, PinholeProjection
f_guess = -nan
[pid=25469, PinholeProjection
f_guess = -nan
[pid=25469, PinholeProjection
f_guess = -nan
[pid=25469, PinholeProjection
f_guess = 293.173
[pid=25469, PinholeProjection
f_guess = 283.173
[pid=25469, PinholeProjection
f_guess = 292.715
[pid=25469, PinholeProjection
f_guess = 293.242
[pid=25469, PinholeProjection
f_guess = 299.201
[pid=25469, PinholeProjection
f_guess = 290.261
[pid=25469, PinholeProjection
f_guess = 295.327
[pid=25469, PinholeProjection
f_guess = 294.727
[pid=25469, PinholeProjection
f_guess = 289.005
[pid=25469, PinholeProjection
f_guess = 255.458
[pid=25469, PinholeProjection
f_guess = 292.344
[pid=25469, PinholeProjection
f_guess = 293.288
[pid=25469, PinholeProjection
f_guess = 301.845
[pid=25469, PinholeProjection
f_guess = 289.191
[pid=25469, PinholeProjection
f_guess = 295.953
[pid=25469, PinholeProjection
f_guess = 295.147
[pid=25469, PinholeProjection
f_guess = 288.122
[pid=25469, PinholeProjection
f_guess = 307.597
[pid=25469, PinholeProjection
f_guess = 305.265
[pid=25469, PinholeProjection
f_guess = 310.554
[pid=25469, PinholeProjection
f_guess = 294.347
[pid=25469, PinholeProjection
f_guess = 300.68
[pid=25469, PinholeProjection
f_guess = 299.417
[pid=25469, PinholeProjection
f_guess = 290.82
[pid=25469, PinholeProjection
f_guess = 297.672
[pid=25469, PinholeProjection
f_guess = 313.004
[pid=25469, PinholeProjection
f_guess = 286.565
[pid=25469, PinholeProjection
f_guess = 297.965
[pid=25469, PinholeProjection
f_guess = 296.545
[pid=25469, PinholeProjection
f_guess = 286.622
[pid=25469, PinholeProjection
f_guess = 318.236
[pid=25469, PinholeProjection
f_guess = 284.121
[pid=25469, PinholeProjection
f_guess = 298.008
[pid=25469, PinholeProjection
f_guess = 296.411
[pid=25469, PinholeProjection
f_guess = 285.701
[pid=25469, PinholeProjection
f_guess = 219.532
[pid=25469, PinholeProjection
f_guess = 284.302
[pid=25469, PinholeProjection
f_guess = 284.32
[pid=25469, PinholeProjection
f_guess = 275.005
[pid=25469, PinholeProjection
f_guess = 320.795
[pid=25469, PinholeProjection
f_guess = 311.309
[pid=25469, PinholeProjection
f_guess = 286.668
[pid=25469, PinholeProjection
f_guess = 284.401
[pid=25469, PinholeProjection
f_guess = 266.201
[pid=25469, PinholeProjection
f_guess = 261.311
[pid=25469, PinholeProjection
针对异常值的出现,通过增加std::isnan(f_guess)判断来消除异常值
针对同一组实验数据,采用全角点估计fx/fy的标定结果如下:
f0 = 296.505
intrinsics guess: [296.50540051 296.50540051 319.5 239.5]
针对同一组实验数据,采用非全角点估计fx/fy的标定结果如下:
f0 = 296.397
intrinsics guess: [296.39693074 296.39693074 319.5 239.5]
对同一相机的另一组实验数据,采用非全角点估计fx/fy的标定结果如下:
f0 = 201.65
intrinsics guess: [201.64985053 201.64985053 319.5 239.5]
实验结果发现标定结果差别不大.
对于第二组实验(另外一个相机),里面没有全角点出现的图片,即非全角点估计fx/fy的标定结果如下:
实验一
f0 = 296.397
intrinsics guess: [242.5069459 242.5069459 319.5 239.5]

实验二
f0 = 271.163
intrinsics guess: [271.16292221 271.16292221 319.5 239.5]
实验三
f0 = 283.309
intrinsics guess: [283.30903368 283.30903368 319.5 239.5]