机器学习中的数学(4)-线性判别分析(LDA), 主成分分析(PCA)、奇异值分解(SVD)
1、What & Why PCA(主成分分析)
PCA,Principal components analyses,主成分分析。广泛应用于降维,有损数据压缩,特征提取和数据可视化。也被称为Karhunen-Loeve变换
从降维的方法角度来看,有两种PCA的定义方式,方差最大和损失最小两种方式。这里需要有一个直观的理解:什么是变换(线性代数基础)。
但是总的来说,PCA的核心目的是寻找一个方向(找到这个方向意味着二维中的点可以被压缩到一条直线上,即降维),这个方向可以:
- 最大化正交投影后数据的方差(让数据在经过变换后更加分散)
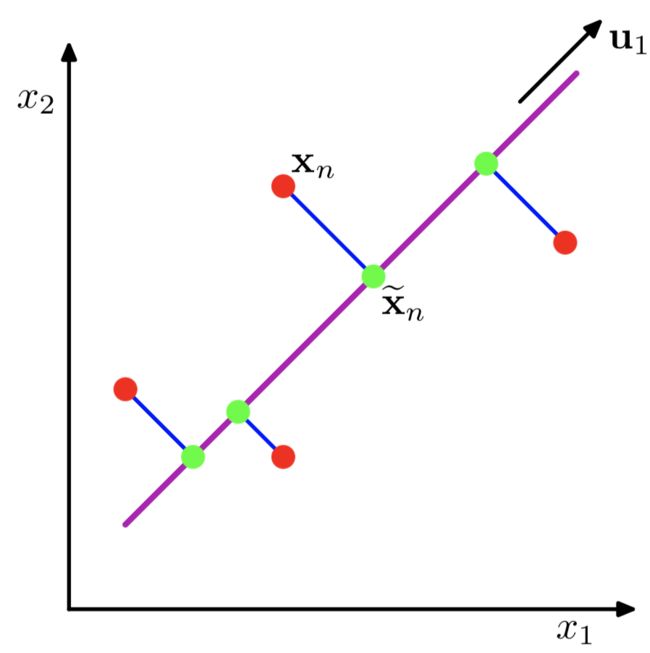
紫色的直线 u1即是关于 x1,x2二维的正交投影的对应一维表示
PCA定义为使绿色点集的方差最小(方差是尽量让绿色所有点都聚在一坨)其中的蓝线是原始数据集(红点)到低纬度的距离,这可以引出第二种定义方式
- 最小化投影造成的损失(下图中所有红线(投影造成的损失)加起来最小)
PCA 主成分分析主要目的是为了减少数据维数,其中Auto-encoder也是一种精巧的降维手段。
2、奇异值分解(SVD)
详细的描述:机器学习中的数学(5)-强大的矩阵奇异值分解(SVD)及其应用
SVD不仅是一个数学问题,在工程应用中的很多地方都有它的身影,比如前面讲的PCA,掌握了SVD原理后再去看PCA那是相当简单的,在推荐系统方面,SVD更是名声大噪,将它应用于推荐系统的是Netflix大奖的获得者Koren,可以在Google上找到他写的文章;用SVD可以很容易得到任意矩阵的满秩分解,用满秩分解可以对数据做压缩。可以用SVD来证明对任意M*N的矩阵均存在如下分解:

在开始讲解SVD之前,先补充一点矩阵代数的相关知识。
相关概念
参考自维基百科。
- 正交矩阵:若一个方阵其行与列皆为正交的单位向量,则该矩阵为正交矩阵,且该矩阵的转置和其逆相等。两个向量正交的意思是两个向量的内积为 0
- 正定矩阵:如果对于所有的非零实系数向量 z,都有
,则称矩阵 A 是正定的。正定矩阵的行列式必然大于 0, 所有特征值也必然 > 0。相对应的,半正定矩阵的行列式必然 ≥ 0。
能学到SVD和PCA的情况下,我这里就默认大家都懂了特征值与特征向量的意义,如果连这2个名词的意义都不懂的话,我建议再回去补一下(我这里不是单纯的指大学里学的如何懂得求特征值、特征向量,这是最lou的了,希望懂的是它的几何意义),这里我就不赘述的去说了。
它其实对应的线性变换是下面的形式:
上面的矩阵是对称的,所以这个变换是一个对x,y轴的方向一个拉伸变换(每一个对角线上的元素将会对一个维度进行拉伸变换,当值>1时,是拉长,当值<1时时缩短),当矩阵不是对称的时候,假如说矩阵是下面的样子:

在图中,蓝色的箭头是一个最主要的变化方向(变化方向可能有不止一个),如果我们想要描述好一个变换,那我们就描述好这个变换主要的变化方向就好了。反过头来看看之前特征值分解的式子,分解得到的Σ矩阵是一个对角阵,里面的特征值是由大到小排列的,这些特征值所对应的特征向量就是描述这个矩阵变化方向(从主要的变化到次要的变化排列)
当矩阵是高维的情况下,那么这个矩阵就是高维空间下的一个线性变换,这个线性变化可能没法通过图片来表示,但是可以想象,这个变换也同样有很多的变换方向,我们通过特征值分解得到的前N个特征向量,那么就对应了这个矩阵最主要的N个变化方向。我们利用这前N个变化方向,就可以近似这个矩阵(变换)。也就是之前说的:提取这个矩阵最重要的特征。总结一下,特征值分解可以得到特征值与特征向量,特征值表示的是这个特征到底有多重要,而特征向量表示这个特征是什么,可以将每一个特征向量理解为一个线性的子空间,我们可以利用这些线性的子空间干很多的事情。不过,特征值分解也有很多的局限,比如说变换的矩阵必须是方阵。
下面谈谈奇异值分解。特征值分解是一个提取矩阵特征很不错的方法,但是它只是对方阵而言的,在现实的世界中,我们看到的大部分矩阵都不是方阵,比如说有N个学生,每个学生有M科成绩,这样形成的一个N * M的矩阵就不可能是方阵,我们怎样才能描述这样普通的矩阵呢的重要特征呢?奇异值分解可以用来干这个事情,奇异值分解是一个能适用于任意的矩阵的一种分解的方法:

注意:本篇文章内如未作说明矩阵均指实数矩阵。
假设有 m×n 的矩阵 A ,那么 SVD 就是要找到如下式的这么一个分解,将 A分解为 3 个矩阵的乘积:
![]()
其中,U和 V都是正交矩阵,而 Σ就是一个非负实对角矩阵。
SVD求解
U和 V的列分别叫做 A的 左奇异向量(left-singular vectors)和 右奇异向量(right-singular vectors),Σ 的对角线上的值叫做 A的奇异值(singular values)。
其实整个求解 SVD 的过程就是求解这 3 个矩阵的过程,而求解这 3 个矩阵的过程就是求解特征值和特征向量的过程,问题就在于 求谁的特征值和特征向量。
- U 的列由
 的单位化过的特征向量构成
的单位化过的特征向量构成 - V的列由
 的单位化过的特征向量构成
的单位化过的特征向量构成 - Σ的对角元素来源于 或 的特征值的平方根,并且是按从大到小的顺序排列的
知道了这些,那么求解 SVD 的步骤就显而易见了:
- 求 的特征值和特征向量,用单位化的特征向量构成 U
- 求 的特征值和特征向量,用单位化的特征向量构成 V
- 将 或者 的特征值求平方根,然后构成 Σ
举例
那么可以计算得到
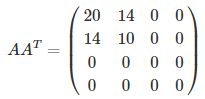
接下来就是求这个矩阵的特征值和特征向量了
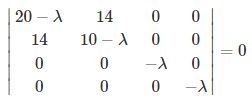
可以得到 λ1≈29.86606875,λ2≈0.13393125,λ3=λ4=0,有 4 个特征值。
对应的单位化过的特征向量为:
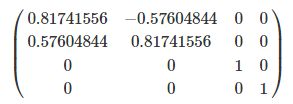
这就是矩阵 U了。
同样的过程求解 ATAATA 的特征值和特征向量,求得 λ1≈0.13393125,λ2≈29.86606875,将特征值降序排列后对应的单位化过的特征向量为:
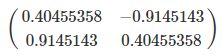
这就是矩阵 V了。
而矩阵 Σ根据上面说的为特征值的平方根构成的对角矩阵
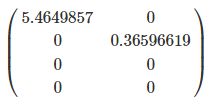
到此,SVD 分解就结束了,原来的矩阵 A就被分解成了 3 个矩阵的乘积。
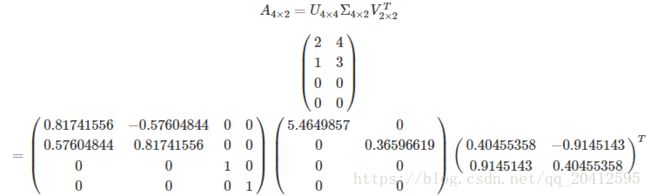
对奇异值分解的理解
紧接上面所说,为什么SVD能够抽取数据里的主要特征呢,前面还一直没有谈到,那接下来就着重说说奇异值分解的一些内在含义。
分解之后再截断近似计算:
这里我们借用分块矩阵来叙述:
我们将U按列进行分块,有U=(u1,u2,u3,...un),V按行向量进行划分,有V=(v1,v2,v3,...vm)
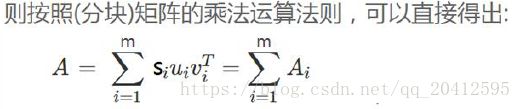
这里我们要注意,![]() 中
中![]() 表示的一个列向量,
表示的一个列向量,![]() 表示的是一个行向量,他们相乘将会得到一个mxn的矩阵(同原矩阵一样的大小,只是值不同而已),在乘上对应的特征值,表示这个乘起来的矩阵的重要程度,那么原矩阵A就被分解成了m个相同大小的分矩阵的和(分矩阵的维度为mxn)。
表示的是一个行向量,他们相乘将会得到一个mxn的矩阵(同原矩阵一样的大小,只是值不同而已),在乘上对应的特征值,表示这个乘起来的矩阵的重要程度,那么原矩阵A就被分解成了m个相同大小的分矩阵的和(分矩阵的维度为mxn)。

近似计算的形象理解
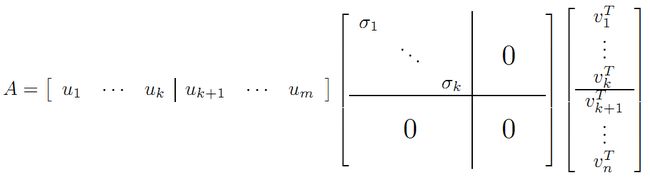
利用矩阵分块乘法展开得:

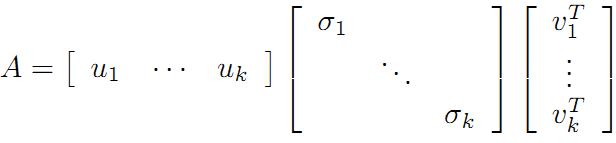
这样矩阵的乘法看起来像是下面的样子:

整个SVD的推导过程就是这样的。
3、奇异值与主成分分析(PCA)
主成分分析在上面也讲了一些,这里主要谈谈如何用SVD去解PCA的问题。PCA的问题其实是一个基的变换,使得变换后的数据有着最大的方差。方差的大小描述的是一个变量的信息量,我们在讲一个东西的稳定性的时候,往往说要减小方差,如果一个模型的方差很大,那就说明模型不稳定了。但是对于我们用于机器学习的数据(主要是训练数据),方差大才有意义,不然输入的数据都是同一个点,那方差就为0了,这样输入的多个数据就等同于一个数据了。以下面这张图为例子:

这个假设是一个摄像机采集一个物体运动得到的图片,上面的点表示物体运动的位置,假如我们想要用一条直线去拟合这些点,那我们会选择什么方向的线呢?当然是图上标有signal的那条线。如果我们把这些点单纯的投影到x轴或者y轴上,最后在x轴与y轴上得到的方差是相似的(因为这些点的趋势是在45度左右的方向,所以投影到x轴或者y轴上都是类似的),如果我们使用原来的xy坐标系去看这些点,容易看不出来这些点真正的方向是什么。但是如果我们进行坐标系的变化,横轴变成了signal的方向,纵轴变成了noise的方向,则就很容易发现什么方向的方差大,什么方向的方差小了。
一般来说,方差大的方向是信号的方向,方差小的方向是噪声的方向,我们在数据挖掘中或者数字信号处理中,往往要提高信号与噪声的比例,也就是信噪比。对上图来说,如果我们只保留signal方向的数据,也可以对原数据进行不错的近似了。
PCA的全部工作简单点说,就是对原始的空间中顺序地找一组相互正交的坐标轴,第一个轴是使得方差最大的,第二个轴是在与第一个轴正交的平面中使得方差最大的,第三个轴是在与第1、2个轴正交的平面中方差最大的,这样假设在N维空间中,我们可以找到N个这样的坐标轴,我们取前r个去近似这个空间,这样就从一个N维的空间压缩到r维的空间了,但是我们选择的r个坐标轴能够使得空间的压缩使得数据的损失最小。
还是假设我们矩阵每一行表示一个样本,每一列表示一个feature,用矩阵的语言来表示,将一个m * n的矩阵A的进行坐标轴的变化,P就是一个变换的矩阵从一个N维的空间变换到另一个N维的空间,在空间中就会进行一些类似于旋转、拉伸的变化。
而将一个m * n的矩阵A变换成一个m * r的矩阵,这样就会使得本来有n个feature的,变成了有r个feature了(r < n),这r个其实就是对n个feature的一种提炼,我们就把这个称为feature的压缩。用数学语言表示就是:

但是这个怎么和SVD扯上关系呢?之前谈到,SVD得出的奇异向量也是从奇异值由大到小排列的,按PCA的观点来看,就是方差最大的坐标轴就是第一个奇异向量,方差次大的坐标轴就是第二个奇异向量…我们回忆一下之前得到的SVD式子:

在矩阵的两边同时乘上一个矩阵V,由于V是一个正交的矩阵,所以V转置乘以V得到单位阵I,所以可以化成后面的式子

将后面的式子与AxP那个mxn的矩阵变换为mxr的矩阵的式子对照看看,在这里,其实V就是P,也就是一个变化的向量。这里是将一个mxn的矩阵压缩到一个mxr的矩阵,也就是对列进行压缩,如果我们想对行进行压缩(在PCA的观点下,对行进行压缩可以理解为,将一些相似的sample合并在一起,或者将一些没有太大价值的sample去掉)怎么办呢?同样我们写出一个通用的行压缩例子:

这样就从一个m行的矩阵压缩到一个r行的矩阵了,对SVD来说也是一样的,我们对SVD分解的式子两边乘以U的转置U'

这样我们就得到了对行进行压缩的式子。可以看出,其实PCA几乎可以说是对SVD的一个包装,如果我们实现了SVD,那也就实现了PCA了,而且更好的地方是,有了SVD,我们就可以得到两个方向的PCA,如果我们对![]() 进行特征值的分解,只能得到一个方向的PCA。
进行特征值的分解,只能得到一个方向的PCA。
4、线性判别分析(LDA)
详细的讲解移到:PCA&LDA的详细推导
参考资料:
https://charlesliuyx.github.io/2017/10/05/%E3%80%90%E7%9B%B4%E8%A7%82%E8%AF%A6%E8%A7%A3%E3%80%91%E4%BB%80%E4%B9%88%E6%98%AFPCA%E3%80%81SVD/
https://blog.csdn.net/u010099080/article/details/68060274
https://blog.csdn.net/zhongkejingwang/article/details/43053513
https://www.cnblogs.com/LeftNotEasy/archive/2011/01/19/svd-and-applications.html