十、键盘控制无人机 · 下(multirotor_keyboard_control.py解读)
笔记来源于开源项目:基于PX4和ROS的无人机仿真平台
来源于开源项目:GAAS
目录
一、解读启动通信的multirotor_keyboard_control.py脚本
1、库函数以及消息
2、变量及其初始值
3、主函数外的getKey()和print_msg()函数
4、main主函数
(1)、初始值的设立
(2)、while循环监听键盘的输入做出反应
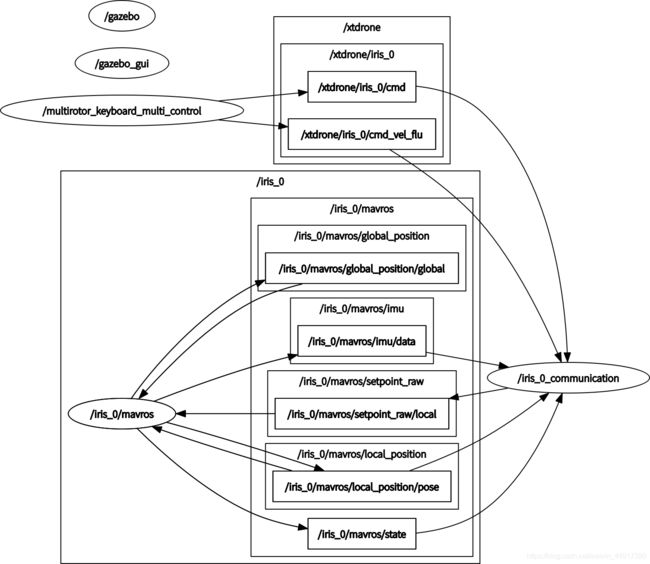
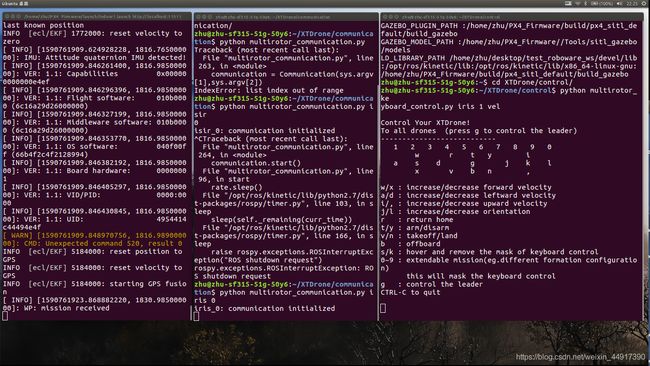
二、打开程序,查看节点话题关系图
一、解读启动通信的multirotor_keyboard_control.py脚本
import rospy
from geometry_msgs.msg import Twist
import sys, select, os
import tty, termios
from std_msgs.msg import String
MAX_LINEAR = 10
MAX_ANG_VEL = 0.1
LINEAR_STEP_SIZE = 0.01
ANG_VEL_STEP_SIZE = 0.01
cmd_vel_mask = False
ctrl_leader = False
msg2all = """
Control Your XTDrone!
To all drones (press g to control the leader)
---------------------------
1 2 3 4 5 6 7 8 9 0
w r t y i
a s d g j k l
x v b n ,
w/x : increase/decrease forward velocity
a/d : increase/decrease leftward velocity
i/, : increase/decrease upward velocity
j/l : increase/decrease orientation
r : return home
t/y : arm/disarm
v/n : takeoff/land
b : offboard
s/k : hover and remove the mask of keyboard control
0~9 : extendable mission(eg.different formation configuration)
this will mask the keyboard control
g : control the leader
CTRL-C to quit
"""
msg2leader = """
Control Your XTDrone!
To the leader (press g to control all drones)
---------------------------
1 2 3 4 5 6 7 8 9 0
w r t y i
a s d g j k l
x v b n ,
w/x : increase/decrease forward velocity
a/d : increase/decrease leftward velocity
i/, : increase/decrease upward velocity
j/l : increase/decrease orientation
r : return home
t/y : arm/disarm
v/n : takeoff(disenabled now)/land
b : offboard
s/k : hover and remove the mask of keyboard control
0~9 : extendable mission(eg.different formation configuration)
this will mask the keyboard control
g : control all drones
CTRL-C to quit
"""
e = """
Communications Failed
"""
def getKey():
tty.setraw(sys.stdin.fileno())
rlist, _, _ = select.select([sys.stdin], [], [], 0.1)
if rlist:
key = sys.stdin.read(1)
else:
key = ''
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)
return key
def print_msg():
if ctrl_leader:
print(msg2leader)
else:
print(msg2all)
if __name__=="__main__":
settings = termios.tcgetattr(sys.stdin)
multirotor_type = sys.argv[1]
multirotor_num = int(sys.argv[2])
control_type = sys.argv[3]
if multirotor_num == 18:
formation_configs = ['waiting', 'cuboid', 'sphere', 'diamond']
elif multirotor_num == 9:
formation_configs = ['waiting', 'cube', 'pyramid', 'triangle']
elif multirotor_num == 6:
formation_configs = ['waiting', 'T', 'diamond', 'triangle']
cmd= String()
twist = Twist()
rospy.init_node('multirotor_keyboard_multi_control')
if control_type == 'vel':
multi_cmd_vel_flu_pub = [None]*multirotor_num
multi_cmd_pub = [None]*multirotor_num
for i in range(multirotor_num):
multi_cmd_vel_flu_pub[i] = rospy.Publisher('/xtdrone/'+multirotor_type+'_'+str(i)+'/cmd_vel_flu', Twist, queue_size=10)
multi_cmd_pub[i] = rospy.Publisher('/xtdrone/'+multirotor_type+'_'+str(i)+'/cmd',String,queue_size=10)
leader_cmd_vel_flu_pub = rospy.Publisher("/xtdrone/leader/cmd_vel_flu", Twist, queue_size=10)
leader_cmd_pub = rospy.Publisher("/xtdrone/leader/cmd", String, queue_size=10)
else:
multi_cmd_accel_flu_pub = [None]*multirotor_num
multi_cmd_pub = [None]*multirotor_num
for i in range(multirotor_num):
multi_cmd_accel_flu_pub[i] = rospy.Publisher('/xtdrone/'+multirotor_type+'_'+str(i)+'/cmd_accel_flu', Twist, queue_size=10)
multi_cmd_pub[i] = rospy.Publisher('/xtdrone/'+multirotor_type+'_'+str(i)+'/cmd',String,queue_size=10)
leader_cmd_accel_flu_pub = rospy.Publisher("/xtdrone/leader/cmd_accel_flu", Twist, queue_size=10)
leader_cmd_pub = rospy.Publisher("/xtdrone/leader/cmd", String, queue_size=10)
forward = 0.0
leftward = 0.0
upward = 0.0
angular = 0.0
print_msg()
while(1):
key = getKey()
if key == 'w' :
forward = forward + LINEAR_STEP_SIZE
print_msg()
if control_type == 'vel':
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
else:
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
elif key == 'x' :
forward = forward - LINEAR_STEP_SIZE
print_msg()
if control_type == 'vel':
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
else:
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
elif key == 'a' :
leftward = leftward + LINEAR_STEP_SIZE
print_msg()
if control_type == 'vel':
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
else:
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
elif key == 'd' :
leftward = leftward - LINEAR_STEP_SIZE
print_msg()
if control_type == 'vel':
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
else:
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
elif key == 'i' :
upward = upward + LINEAR_STEP_SIZE
print_msg()
if control_type == 'vel':
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
else:
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
elif key == ',' :
upward = upward - LINEAR_STEP_SIZE
print_msg()
if control_type == 'vel':
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
else:
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
elif key == 'j':
angular = angular + ANG_VEL_STEP_SIZE
print_msg()
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
elif key == 'l':
angular = angular - ANG_VEL_STEP_SIZE
print_msg()
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
elif key == 'r':
cmd = 'AUTO.RTL'
print_msg()
print('Returning home')
elif key == 't':
cmd = 'ARM'
print_msg()
print('Arming')
elif key == 'y':
cmd = 'DISARM'
print_msg()
print('Disarming')
elif key == 'v':
cmd = 'AUTO.TAKEOFF'
cmd = ''
print_msg()
#print('Takeoff mode is disenabled now')
elif key == 'b':
cmd = 'OFFBOARD'
print_msg()
print('Offboard')
elif key == 'n':
cmd = 'AUTO.LAND'
print_msg()
print('Landing')
elif key == 'g':
ctrl_leader = not ctrl_leader
print_msg()
elif key in ['k', 's']:
cmd_vel_mask = False
forward = 0.0
leftward = 0.0
upward = 0.0
angular = 0.0
cmd = 'HOVER'
print_msg()
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
print('Hover')
else:
for i in range(10):
if key == str(i):
print(str(i))
cmd = formation_configs[i]
print_msg()
print(cmd)
cmd_vel_mask = True
if (key == '\x03'):
break
if forward > MAX_LINEAR:
forward = MAX_LINEAR
elif forward < -MAX_LINEAR:
forward = -MAX_LINEAR
if leftward > MAX_LINEAR:
leftward = MAX_LINEAR
elif leftward < -MAX_LINEAR:
leftward = -MAX_LINEAR
if upward > MAX_LINEAR:
upward = MAX_LINEAR
elif upward < -MAX_LINEAR:
upward = -MAX_LINEAR
if angular > MAX_ANG_VEL:
angular = MAX_ANG_VEL
elif angular < -MAX_ANG_VEL:
angular = - MAX_ANG_VEL
twist.linear.x = forward; twist.linear.y = leftward ; twist.linear.z = upward
twist.angular.x = 0.0; twist.angular.y = 0.0; twist.angular.z = angular
for i in range(multirotor_num):
if ctrl_leader:
if control_type == 'vel':
leader_cmd_vel_flu_pub.publish(twist)
else:
leader_cmd_aceel_flu_pub.publish(twist)
leader_cmd_pub.publish(cmd)
else:
if not cmd_vel_mask:
if control_type == 'vel':
multi_cmd_vel_flu_pub[i].publish(twist)
else:
multi_cmd_accel_flu_pub[i].publish(twist)
multi_cmd_pub[i].publish(cmd)
cmd = ''
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)
1、库函数以及消息
import rospy
from geometry_msgs.msg import Twist
import sys, select, os
import tty, termios
from std_msgs.msg import String-
from geometry_msgs.msg import Twist:几何数据类型的功能包里面引入Twist话题消息
-
from std_msgs.msg import String:标准数据类型功能包里面引入String话题消息
-
select模块:专注于I/O多路复用,要理解select.select模块其实主要就是要理解它的参数, 以及其三个返回值
-
tty模块:终端控制功能(tty在linux中就是终端的意思)
-
termios模块:此模块提供了针对tty I/O 控制的 POSIX 调用的接口。此模块中的所有函数均接受一个文件描述符 fd 作为第一个参数。
-
另外的rospy、sys、os模块就不说了
下面结合具体的函数进行分析
2、变量及其初始值
MAX_LINEAR = 10
MAX_ANG_VEL = 0.1
LINEAR_STEP_SIZE = 0.01
ANG_VEL_STEP_SIZE = 0.01
cmd_vel_mask = False
ctrl_leader = False
msg2all = """
Control Your XTDrone!
To all drones (press g to control the leader)
---------------------------
1 2 3 4 5 6 7 8 9 0
w r t y i
a s d g j k l
x v b n ,
w/x : increase/decrease forward velocity
a/d : increase/decrease leftward velocity
i/, : increase/decrease upward velocity
j/l : increase/decrease orientation
r : return home
t/y : arm/disarm
v/n : takeoff/land
b : offboard
s/k : hover and remove the mask of keyboard control
0~9 : extendable mission(eg.different formation configuration)
this will mask the keyboard control
g : control the leader
CTRL-C to quit
"""
msg2leader = """
Control Your XTDrone!
To the leader (press g to control all drones)
---------------------------
1 2 3 4 5 6 7 8 9 0
w r t y i
a s d g j k l
x v b n ,
w/x : increase/decrease forward velocity
a/d : increase/decrease leftward velocity
i/, : increase/decrease upward velocity
j/l : increase/decrease orientation
r : return home
t/y : arm/disarm
v/n : takeoff(disenabled now)/land
b : offboard
s/k : hover and remove the mask of keyboard control
0~9 : extendable mission(eg.different formation configuration)
this will mask the keyboard control
g : control all drones
CTRL-C to quit
"""
e = """
Communications Failed
"""- MAX_LINEAR=10:表示飞机最大的线速度是10
- MAX_ANG_VEL=0.1:表示飞机最大的角速度是0.1
- LINEAR_STEP_SIZE=0.01:表示飞机改变线速度的时候每次改变0.01
- ANG_STEP_SIZE=0.01:表示飞机改变角速度的时候每次改变0.01
- cmd_vel_mask=False:
- ctrl_leader=False:用来切换控制领导者模式
- msg2all=“......”:To all drones,由于这个控制飞机的程序是基于多机的,因此这个控制模式是所有飞机一起动的控制模式
- msg2leader=“......”:To the leader,这个控制模式是只控制领头的飞机
- e=Communications Failed:出现错误后返回的信息
3、主函数外的getKey()和print_msg()函数
getKey()函数主要涉及监听键盘的按键输入(这个整的看不懂写的是啥意思)
大概就是键盘上按了什么按键,它就读出来是是什么按键
def getKey():
tty.setraw(sys.stdin.fileno())
rlist, _, _ = select.select([sys.stdin], [], [], 0.1)
if rlist:
key = sys.stdin.read(1)
else:
key = ''
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)
return key
- fileno是个文件描述符,文件描述符是一个低级概念,它是一个整数,代表一个打开的文件,也就是说,每打开一个文件都有一个唯一的文件描述符。在在Unix中,按照惯例,三个文件描述符0、1和2分别代表标准输入,标准输出和标准错误。而在Python中输入sys.stdin.fileno()输出为0。
tty模块定义可函数tty.setraw:tty.setraw(fd, when=termios.TCSAFLUSH);这个函数将文件描述符 fd 的模式更改为 raw 。如果 when 被省略,则默认为termios.TCSAFLUSH,并传递给termios.tcsetattr()- sys.stdin:(在Python中的输出是:<_io.TextIOWrapper name='
' mode='r' encoding='UTF-8'>) - select.select()方法接收并监控3个通信列表,进程指定内核监听哪些文件描述符(最多监听1024个fd)的哪些事件, 第一个是所有的输入的data,就是指外部发过来的数据,第2个是监控和接收所有要发出去的data(outgoing data),第3个监控错误信息。
fd_r_list, fd_w_list, fd_e_list = select.select(rlist, wlist, xlist, [timeout]) 参数: 可接受四个参数(前三个必须) rlist: wait until ready for reading wlist: wait until ready for writing xlist: wait for an “exceptional condition” timeout: 超时时间 返回值:三个列表 select方法用来监视文件描述符(当文件描述符条件不满足时,select会阻塞),当某个文件描述符状态改变后,会返回三个列表 1、当参数1 序列中的fd满足“可读”条件时,则获取发生变化的fd并添加到fd_r_list中 2、当参数2 序列中含有fd时,则将该序列中所有的fd添加到 fd_w_list中 3、当参数3 序列中的fd发生错误时,则将该发生错误的fd添加到 fd_e_list中 4、当超时时间为空,则select会一直阻塞,直到监听的句柄发生变化 当超时时间 = n(正整数)时,那么如果监听的句柄均无任何变化,则select会阻塞n秒,之后返回三个空列表,如果监听的句柄有变化,则直接执行。
- 如果序列中的fd满足“可读”条件时,则获取发生变化的fd并添加到rlist中,然后读取出key的值
-
termios.tcsetattr(fd, when, attributes)根据 attributes 列表设置文件描述符 fd 的 tty 属性,该列表即
tcgetattr()所返回的对象。 when 参数确定何时改变属性:TCSANOW表示立即改变,TCSADRAIN表示在传输所有队列输出后再改变,或TCSAFLUSH表示在传输所有队列输出并丢失所有队列输入后再改变。
关于函数print_msg()还是很好理解的,只要控制了ctrl_leader的输出是True还是False,就可以控制输出是全局控制模式还是领导控制模式:
def print_msg():
if ctrl_leader:
print(msg2leader)
else:
print(msg2all) 4、main主函数
if __name__=="__main__":
settings = termios.tcgetattr(sys.stdin)
multirotor_type = sys.argv[1]
multirotor_num = int(sys.argv[2])
control_type = sys.argv[3]
if multirotor_num == 18:
formation_configs = ['waiting', 'cuboid', 'sphere', 'diamond']
elif multirotor_num == 9:
formation_configs = ['waiting', 'cube', 'pyramid', 'triangle']
elif multirotor_num == 6:
formation_configs = ['waiting', 'T', 'diamond', 'triangle']
cmd= String()
twist = Twist()
rospy.init_node('multirotor_keyboard_multi_control')
if control_type == 'vel':
multi_cmd_vel_flu_pub = [None]*multirotor_num
multi_cmd_pub = [None]*multirotor_num
for i in range(multirotor_num):
multi_cmd_vel_flu_pub[i] = rospy.Publisher('/xtdrone/'+multirotor_type+'_'+str(i)+'/cmd_vel_flu', Twist, queue_size=10)
multi_cmd_pub[i] = rospy.Publisher('/xtdrone/'+multirotor_type+'_'+str(i)+'/cmd',String,queue_size=10)
leader_cmd_vel_flu_pub = rospy.Publisher("/xtdrone/leader/cmd_vel_flu", Twist, queue_size=10)
leader_cmd_pub = rospy.Publisher("/xtdrone/leader/cmd", String, queue_size=10)
else:
multi_cmd_accel_flu_pub = [None]*multirotor_num
multi_cmd_pub = [None]*multirotor_num
for i in range(multirotor_num):
multi_cmd_accel_flu_pub[i] = rospy.Publisher('/xtdrone/'+multirotor_type+'_'+str(i)+'/cmd_accel_flu', Twist, queue_size=10)
multi_cmd_pub[i] = rospy.Publisher('/xtdrone/'+multirotor_type+'_'+str(i)+'/cmd',String,queue_size=10)
leader_cmd_accel_flu_pub = rospy.Publisher("/xtdrone/leader/cmd_accel_flu", Twist, queue_size=10)
leader_cmd_pub = rospy.Publisher("/xtdrone/leader/cmd", String, queue_size=10)
forward = 0.0
leftward = 0.0
upward = 0.0
angular = 0.0
print_msg()
while(1):
key = getKey()
if key == 'w' :
forward = forward + LINEAR_STEP_SIZE
print_msg()
if control_type == 'vel':
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
else:
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
elif key == 'x' :
forward = forward - LINEAR_STEP_SIZE
print_msg()
if control_type == 'vel':
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
else:
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
elif key == 'a' :
leftward = leftward + LINEAR_STEP_SIZE
print_msg()
if control_type == 'vel':
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
else:
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
elif key == 'd' :
leftward = leftward - LINEAR_STEP_SIZE
print_msg()
if control_type == 'vel':
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
else:
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
elif key == 'i' :
upward = upward + LINEAR_STEP_SIZE
print_msg()
if control_type == 'vel':
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
else:
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
elif key == ',' :
upward = upward - LINEAR_STEP_SIZE
print_msg()
if control_type == 'vel':
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
else:
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
elif key == 'j':
angular = angular + ANG_VEL_STEP_SIZE
print_msg()
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
elif key == 'l':
angular = angular - ANG_VEL_STEP_SIZE
print_msg()
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
elif key == 'r':
cmd = 'AUTO.RTL'
print_msg()
print('Returning home')
elif key == 't':
cmd = 'ARM'
print_msg()
print('Arming')
elif key == 'y':
cmd = 'DISARM'
print_msg()
print('Disarming')
elif key == 'v':
cmd = 'AUTO.TAKEOFF'
cmd = ''
print_msg()
#print('Takeoff mode is disenabled now')
elif key == 'b':
cmd = 'OFFBOARD'
print_msg()
print('Offboard')
elif key == 'n':
cmd = 'AUTO.LAND'
print_msg()
print('Landing')
elif key == 'g':
ctrl_leader = not ctrl_leader
print_msg()
elif key in ['k', 's']:
cmd_vel_mask = False
forward = 0.0
leftward = 0.0
upward = 0.0
angular = 0.0
cmd = 'HOVER'
print_msg()
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
print('Hover')
else:
for i in range(10):
if key == str(i):
print(str(i))
cmd = formation_configs[i]
print_msg()
print(cmd)
cmd_vel_mask = True
if (key == '\x03'):
break
if forward > MAX_LINEAR:
forward = MAX_LINEAR
elif forward < -MAX_LINEAR:
forward = -MAX_LINEAR
if leftward > MAX_LINEAR:
leftward = MAX_LINEAR
elif leftward < -MAX_LINEAR:
leftward = -MAX_LINEAR
if upward > MAX_LINEAR:
upward = MAX_LINEAR
elif upward < -MAX_LINEAR:
upward = -MAX_LINEAR
if angular > MAX_ANG_VEL:
angular = MAX_ANG_VEL
elif angular < -MAX_ANG_VEL:
angular = - MAX_ANG_VEL
twist.linear.x = forward; twist.linear.y = leftward ; twist.linear.z = upward
twist.angular.x = 0.0; twist.angular.y = 0.0; twist.angular.z = angular
for i in range(multirotor_num):
if ctrl_leader:
if control_type == 'vel':
leader_cmd_vel_flu_pub.publish(twist)
else:
leader_cmd_aceel_flu_pub.publish(twist)
leader_cmd_pub.publish(cmd)
else:
if not cmd_vel_mask:
if control_type == 'vel':
multi_cmd_vel_flu_pub[i].publish(twist)
else:
multi_cmd_accel_flu_pub[i].publish(twist)
multi_cmd_pub[i].publish(cmd)
cmd = ''
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)(1)、初始值的设立
-
settings = termios.tcgetattr(sys.stdin):这个和键盘的输入有关
-
multirotor_type = sys.argv[1]:返回输入执行Python文件时候后面跟着的第一个参数:飞机的机型
multirotor_num = int(sys.argv[2]):返回第二个参数:飞机的数量
control_type = sys.argv[3]:返回第三个参数:控制的类型(是速度vel控制,还是加速度控制)
- 现在针对多机情况:如果飞机数量是18,9,6,这里就有对应的formation_config(飞行结构配置,飞行队形把应该)
- 设置消息:cmd、twist
-
rospy.init_node('multirotor_keyboard_multi_control'):初始化节点,节点的名字叫做multirotor_keyboard_multi_control(无人机键盘的多样控制)
-
if-else control_type:读取上面的参数之后可以确定control_type的值,然后通过这个值(vel或者空)来判断是速度控制还是加速度控制。我们选取速度(vel)控制来分析:for i in range(multirotor_num)表示对每一架飞机都进行创建发布控制指令消息String以及速度控制消息Twist的Publisher,然后对于领导飞机有专门创建发布领导飞机的控制指令消息String以及速度控制消息Twist的Publisher
-
初始化 forward、leftward、upward 、angular四个方向的速度都为0.0这个基础值
-
print_msg()在终端输出对应的键盘控制模式图
(2)、while循环监听键盘的输入做出反应
key = getKey()表示的key得到为键盘按键的值
下面的程序几乎一个样子,选择一个来具体分析一下:
if key == 'w' :
forward = forward + LINEAR_STEP_SIZE
print_msg()
if control_type == 'vel':
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
else:
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))当有按键按下为”w“的时候,forword的值就是原来的值再加上按一次就加上一次速度增加的步长
然后在输出一次现在的控制模式
如果现在的控制模式是速度模式,那么就在终端输出此刻的f,l,u,a的值
elif key == 'r':
cmd = 'AUTO.RTL'
print_msg()
print('Returning home')当有按键按下为”r“的时候就把cmd的模式调整为'AUTO.RTL',还记得这个cmd吗,前面cmd=String(),然后是通过这个消息发布出去的。那你还记得multirotor_communication.py这个上一篇教程解读里面不是有几个订阅消息的subscriber嘛,比如,就是这里的cmd发布出去指令的string()消息,然后上一篇的通讯连接中的cmd订阅到然后做出分析的。
这两个可以提出来给大家看一下:
elif key == 'g':
ctrl_leader = not ctrl_leader
print_msg()
elif key in ['k', 's']:
cmd_vel_mask = False
forward = 0.0
leftward = 0.0
upward = 0.0
angular = 0.0
cmd = 'HOVER'
print_msg()
print("currently:\t forward vel %.2f\t leftward vel %.2f\t upward vel %.2f\t angular %.2f " % (forward, leftward, upward, angular))
print('Hover')这一段代码是配置多机的飞机队伍的时候用到的,看看就行了:
感觉源代码的格式有点问题,我就调整了一下空格:
else:
for i in range(10):
if key == str(i):
print(str(i))
cmd = formation_configs[i]
print_msg()
print(cmd)
cmd_vel_mask = True
if (key == '\x03'):
break下面是一大段对最大值的比较,就是不能超过最大值
同时,这里也定义了数据消息Twist的值:
twist.linear.x = forward; twist.linear.y = leftward ; twist.linear.z = upward
twist.angular.x = 0.0; twist.angular.y = 0.0; twist.angular.z = angular然后每一只飞机都发布出去新的位置消息(之前那个是在循环外面的,是创建好了要发布所有的节点的消息以及初始位置的消息的Publisher):
for i in range(multirotor_num):
if ctrl_leader:
if control_type == 'vel':
leader_cmd_vel_flu_pub.publish(twist)
else:
leader_cmd_aceel_flu_pub.publish(twist)
leader_cmd_pub.publish(cmd)
else:
if not cmd_vel_mask:
if control_type == 'vel':
multi_cmd_vel_flu_pub[i].publish(twist)
else:
multi_cmd_accel_flu_pub[i].publish(twist)
multi_cmd_pub[i].publish(cmd)最后的这个一条也和键盘的输入有关吧,反正不是很明白:
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)二、打开程序,查看节点话题关系图