ROS学习笔记12 —— urdf/xacro的使用以及gazebo属性的描述
文章目录
- 1. link 标签包含的元素
- 2. joint标签
- 3. xacro
- 1) 常量定义与使用
- 2) 数学
- 3) 宏定义macro
- 示例:
- 4) 条件块
- 5) rospack命令
- 6) 包含其他xacro文件
- 7) YAML
- 8) 其他
- 4. Gazebo标签
- 1) 必须的标签
- 2) 纹理相关
- 3) 固定到世界坐标系
- 4) transmission标签
- 5) 验证gazebo模型
- Node:

1. link 标签包含的元素
注意,如果link标签没有inertial,那么在gazebo中将无法看到.
颜色定义:
<material name="orange">
<color rgba="${255/255} ${108/255} ${10/255} 1.0"/>
material>
2. joint标签
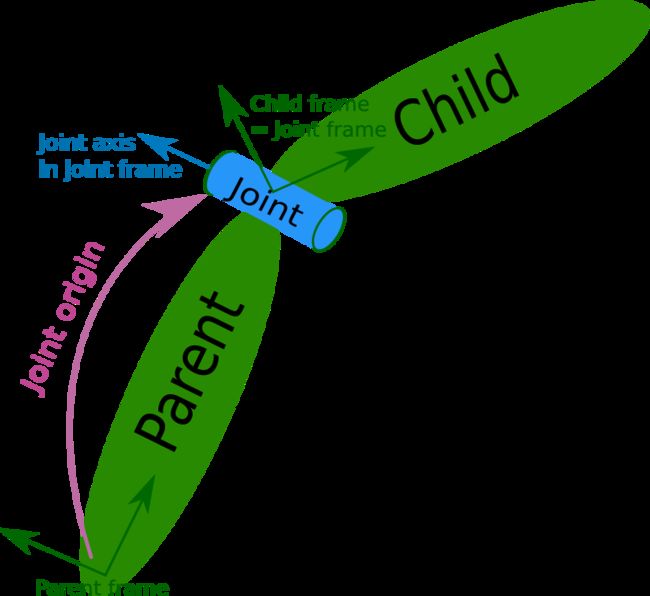
<joint name="car_base_wheel" type="continuous">
<origin xyz="${(wheel_length+car_width)/2.0} 0.0 0.0" rpy="0.0 0.0 0.0"/>
<parent link="car_link"/>
<child link="wheel"/>
<axis xyz="0.0 1.0 0.0"/>
joint>
关节类型如下:
- 旋转(revolute):具有由上限和下限指定的有限范围
- 连续(continuous) :绕轴旋转,没有上限和下限,例如轮子
- 棱柱形(prismatic) :滑动接头,沿轴线滑动,并具有由上限和下限指定的有限范围
- 固定(fixed) :自由度为0
- 浮动(floating) :关节允许所有6个自由度的运动
- 平面(planar):此允许在垂直于轴的平面内运动
其他属性参见:http://wiki.ros.org/urdf/XML/joint
注:这些属性在sw2urdf时可设置。
3. xacro
1) 常量定义与使用
<xacro:property name=”robotname” value=”marvin” />
<link name=”${robotname}s_leg” />
<xacro:property name="the_radius" value="2.1" />
<xacro:property name="the_length" value="4.5" />
<geometry type="cylinder" radius="${the_radius}" length="${the_length}" />
2) 数学
可以使用+-*/()
<cylinder radius="${wheeldiam/2}" length="0.1"/>
<origin xyz="${reflect*(width+.02)} 0 0.25" />
<xacro:property name="R" value="2" />
<xacro:property name="alpha" value="${30/180*pi}" />
<circle circumference="${2 * pi * R}" pos="${sin(alpha)} ${cos(alpha)}" />
<limit lower="${radians(-90)}" upper="${radians(90)}" effort="0" velocity="${radians(75)}" />
3) 宏定义macro
简单宏定义:
<xacro:macro name="default_inertial" params="mass">
<inertial>
<mass value="${mass}" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0"
iyy="1.0" iyz="0.0"
izz="1.0" />
inertial>
xacro:macro>
<xacro:default_inertial mass="10"/>
参数宏定义:
<xacro:macro name="blue_shape" params="name *shape">
<link name="${name}">
<visual>
<geometry>
<xacro:insert_block name="shape" />
geometry>
<material name="blue"/>
visual>
<collision>
<geometry>
<xacro:insert_block name="shape" />
geometry>
collision>
link>
xacro:macro>
<xacro:blue_shape name="base_link">
<cylinder radius=".42" length=".01" />
xacro:blue_shape>
示例:
例1:
<robot name="test" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:property name="PI" value="3.1415926"/>
<xacro:property name="width" value="0.2" />
<xacro:property name="bodylen" value="0.6" />
<link name="base_link">
<visual>
<geometry>
<cylinder radius="${width}" length="${bodylen}"/>
geometry>
<material name="blue"/>
visual>
<collision>
<geometry>
<cylinder radius="${width}" length="${bodylen}"/>
geometry>
collision>
link>
robot>
例2:使用宏定义,定义多条腿,降低代码量
<xacro:macro name="leg" params="prefix reflect">
<link name="${prefix}_leg">
<visual>
<geometry>
<box size="${leglen} 0.1 0.2"/>
geometry>
<origin xyz="0 0 -${leglen/2}" rpy="0 ${pi/2} 0"/>
<material name="white"/>
visual>
<collision>
<geometry>
<box size="${leglen} 0.1 0.2"/>
geometry>
<origin xyz="0 0 -${leglen/2}" rpy="0 ${pi/2} 0"/>
collision>
<xacro:default_inertial mass="10"/>
link>
<joint name="base_to_${prefix}_leg" type="fixed">
<parent link="base_link"/>
<child link="${prefix}_leg"/>
<origin xyz="0 ${reflect*(width+.02)} 0.25" />
joint>
xacro:macro>
<xacro:leg prefix="right" reflect="1" />
<xacro:leg prefix="left" reflect="-1" />
4) 条件块
xacro具有类似于roslaunch的条件块,这对于诸如可配置的机器人或加载不同的Gazebo插件之类的事情很有用。任意bool型的python条件句都是可以的:
<xacro:if value="" >
<... some xml code here ...>
xacro:if>
<xacro:unless value="" >
<... some xml code here ...>
xacro:unless>
<xacro:property name="var" value="useit"/>
<xacro:if value="${var == 'useit'}"/>
<xacro:if value="${var.startswith('use') and var.endswith('it')}"/>
<xacro:property name="allowed" value="${[1,2,3]}"/>
<xacro:if value="${1 in allowed}"/>
5) rospack命令
<foo value="$(find xacro)" />
<foo value="$(arg myvar)" />
<xacro:arg name="myvar" default="false"/>
<param name="robot_description" command="$(find xacro)/xacro.py $(arg model) myvar:=true" />
6) 包含其他xacro文件
<xacro:include filename="$(find package)/other_file.xacro" />
<xacro:include filename="other_file.xacro" />
<xacro:include filename="$(cwd)/other_file.xacro" />
<xacro:include filename="other_file.xacro" ns="namespace"/>
${namespace.property}
7) YAML
校准数据时,从YAML中加载是理想的选择!
<xacro:property name="yaml_file" value="$(find package)/config/props.yaml" />
<xacro:property name="props" value="${load_yaml(yaml_file)}"/>
<xacro:property name="props" value="${dict(a=1, b=2, c=3)}"/>
<xacro:property name="numbers" value="${[1,2,3,4]}"/>
<xacro:property name="val1" value="${props['val1']}" />
8) 其他
从CMakeLists.txt中构建xacro、元素和属性等等,略~
4. Gazebo标签
1) 必须的标签
对于link:
<link name="link1">
<collision>
<origin xyz="0 0 ${height1/2}" rpy="0 0 0"/>
<geometry>
<box size="${width} ${width} ${height1}"/>
geometry>
collision>
<visual>
<origin xyz="0 0 ${height1/2}" rpy="0 0 0"/>
<geometry>
<box size="${width} ${width} ${height1}"/>
geometry>
<material name="orange"/>
visual>
<inertial>
<origin xyz="0 0 1" rpy="0 0 0"/>
<mass value="1"/>
<inertia
ixx="1.0" ixy="0.0" ixz="0.0"
iyy="1.0" iyz="0.0"
izz="1.0"/>
inertial>
link>
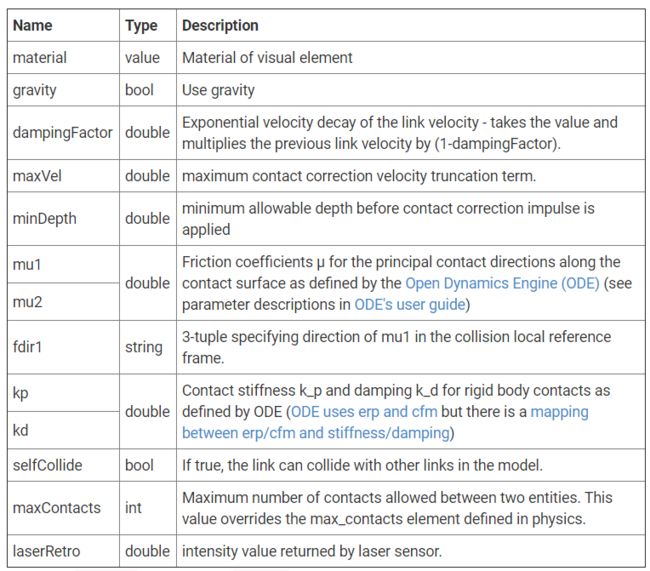
其他可给link添加的标签:
对于joint:
<joint name="joint2" type="continuous">
<parent link="link2"/>
<child link="link3"/>
<origin xyz="0 ${width} ${height2 - axel_offset*2}" rpy="0 0 0"/>
<axis xyz="0 1 0"/>
<dynamics damping="0.7"/>
joint>
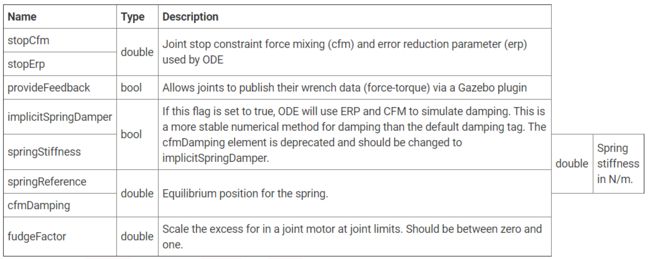
其他可给joint设置的标签:
2) 纹理相关
gazebo中模型渲染纹理:传送门
<gazebo reference="link_name">
<material>Gazebo/WoodFloormaterial>
<mu1>0.5mu1>
<mu2>0.5mu2>
gazebo>
<gazebo reference="link1">
<material>Gazebo/Orangematerial>
gazebo>
mu1、mu2转到这篇博文:传送门
像在Rviz中一样,Gazebo可以同时使用STL和Collada文件。通常建议您使用Collada(.dae)文件,因为它们支持颜色和纹理,而对于STL文件,您只能使用纯色链接。
加载.dae文件:在
<mesh filename="package://myrobot_description/meshes/kinect.dae">
3) 固定到世界坐标系
<link name="world"/>
<joint name="fixed" type="fixed">
<parent link="world"/>
<child link="link1"/>
joint>
4) transmission标签
该标签是为了实现gazebo对模型的驱动!
type: 目前只有一个值:transmission_interface/SimpleTransmissionjoint:首先要指明transmission服务的joint的名称,之后其中包含一个必填属性
hardwareInterface:该属性表明了这个joint是什么类型的,常用的三个属性值:
EffortJointInterface(通过输入力控制电机)VelocityJointInterface(控制电机的转速)PositionJointInterface(控制电机的位置)
actuator:首先要为你的执行器起一个名字(一般就是什么什么motor),之后指定执行器的内部属性mechanicalReduction:指明电机的减速比hardwareInterface:这个可以不指明,因为在joint中已经指明了
注:该部分转自https://blog.csdn.net/wubaobao1993/article/details/80960584
5) 验证gazebo模型
# 检查urdf能否正确的转换为sdf
gz sdf -p test.urdf
# 查看sdf所需信息丢失的任何警告
cat ~/.gazebo/gzsdf.log
具体实例参考:传送门
URDF只能单独指定单个机器人的运动学和动力学特性,而无法指定机器人本身在世界中的姿态,同时它也不是通用的描述格式,并且缺乏摩擦和其他特性。为了解决这些缺点,可以使用SDF文件描述模型
Node:
-
ros中joint驱动靠TF,gazebo中靠物理引擎!
-
使用名称前缀获取两个相似的对象
-
利用
urdf_tutorial功能包查看生成的模型:roslaunch urdf_sim_tutorial display.launch model:=rbo.urdf.xacro -
将xacro转换为urdf:
rosrun xacro xacro.py test.xacro > test.urdf -
launch文件中调用xacro文件解析器
<arg name="model" default="$(find xacro)/xacro --inorder '$(find robot_description)/urdf/test.xacro'"/> <param name="robot_description" command="$(arg model)"/> -
将sdf文件转为urdf
rosrun pysdf sdf2urdf test.sdf test.urdf注意,转完后关节力和速度限位默认为-1,如果有需要,记得修改;该转换仅对单纯的模型描述有效,如果引入球关节等urdf实现不了的文件,则会失败
-
检查sdf转urdf后的文件:
sudo apt-get install liburdfdom-tools check_urdf test.urdf
参考文献:
- http://wiki.ros.org/urdf/Tutorials/Using%20Xacro%20to%20Clean%20Up%20a%20URDF%20File
- http://wiki.ros.org/xacro#Math_expressions
- https://blog.csdn.net/wubaobao1993/article/details/80947968
- http://gazebosim.org/tutorials?tut=ros_urdf&cat=connect_ros
- https://blog.csdn.net/wubaobao1993/article/details/80960584
- http://wiki.ros.org/urdf/XML/joint