雷达导论PART-III.9 测量距离与距离分辨
今天我们讲第15章——测量距离与距离分辨。本章目录如下:
15.1 脉冲延时测距法
- 15.1.1测量距离
- 15.1.2简单的模拟式雷达
- 15.1.3复杂的模拟式雷达
- 15.1.4数字式雷达
- 15.1.5距离分辨力
15.2 距离模糊
- 15.2.1距离模糊的本质
- 15.2.2最大不模糊距离
- 15.2.3应对距离模糊
15.3 去除模糊回波
15.4 解决模糊问题
- 15.4.1给脉冲加标签
- 15.4.2多种PRF
- 15.4.3计算距离
- 15.4.4虚影
- 15.4.5虚影举例
- 15.4.6鉴别虚影
15.5 要有多少种PRF
- 15.5.1消除模糊需要的PRF数量
- 15.5.2消除虚影需要的PRF数量
- 15.5.3折衷
- 15.5.4测量精度
15.6增强脉冲标记
15.7 单目标跟踪
15.8 电扫雷达
15.9 总结
我们之前的文章有说过,军用雷达大部分都是脉冲体制的,脉冲测距的基本原理非常简单。就是测出雷达波从发射到回来的时间,把时间乘以光速再除2就是距离。
在测距时会经常遇到一个词,距离门(range gate),或者叫距离波门,这里解释下它的由来。早期的雷达没有数字电路,怎么测出雷达回波的时间呢?如下图所示,右边有一列开关,按照时间顺序依次开合,记下哪一个开关中有目标回波通过,就可以换算出距离。比如总共有100个开关,间隔0.02ms依次顺序开合。不考虑模糊的情况下,可以测到的最大距离为100*0.00002ms*c/2=300km。把开关看作回波通过的门,总共100个距离门,每一个距离门对应3km(最小距离分辨率),如果第66个距离门有回波,则目标距离为198km。

当雷达数字化以后,ADC取代这些开关进行量化。量化后的数字信号存储在距离仓(range bin)内,其实就是缓存区(比如DDR芯片)。所以距离门和距离仓是一回事。距离门这一叫法也一直延续了下来。
有没有感受到雷达是一门理论与工程紧密结合的学科?
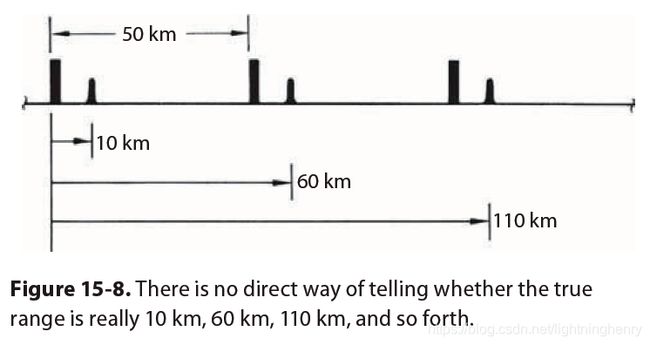
接着,我们来看下测距经常会遇到的一个问题——距离模糊。当雷达波探测到的物体的距离超过了最大不模糊距离时,就会产生距离模糊。那最大不模糊距离是多少呢?这个很好理解,看下图,图中的50km就是该雷达的最大不模糊距离(记为Ru)。当你不确定目标是不是在50km范围内时,你就不知道距离是10km,还是60km,还是110km,还是(10+50*n)km了,也就是说你不知道这个回波是当前发射波的回波,还是前一个发射波的回波,还是前前个发射波的回波。。。这就是距离模糊。
距离模糊不仅仅是因为上面的原因,还有就是雷达会探测到除目标以外的物体,特别是远处的大RCS的物体,峰值也不小。即使你确定目标处在最大不模糊距离内,也会遇到距离模糊的问题。所以雷达测到的距离总是模糊的,
距离模糊的程度通常由所跨越的脉冲间周期数来衡量。在第一个PRT内接收到的回波称为单程(周期)回波。在随后的时间段内接收到的回波称为多程(周期)回波(multiple-time-around echoes, MTAEs)。时延法测距测到的距离都是在一个PRT内换算出来的,所以雷达测距测到的距离不一定是实际距离,我们为这种距离起了个名字,叫视在距离。
那么如何消除距离模糊呢?我们分两种情况来讨论。
第一种情况,我们能够确定目标一定在Ru以内。这种比较好办,我们只需滤掉多程回波即可。最简单有效的办法就是使用两个PRF,交替发射。单程回波对应的视在距离在一次积累时间内几乎是固定的,但是多程回波对应的视在距离就会左右抖动,这样就区分出来了。由于两个PRF差的不多,所以这种技术叫PRF抖动。
第二种情况,我们不能确定目标在Ru以内,这种情况更多,很多情况下,我们的雷达都是中重频或高重频,比如为了抑制静态杂波,为了测速等等,Ru设的比较小。解决方法和PRF抖动的原理一样,区别在于切换的时间要大一些PRF差值也要大一些,这样多程回波对应的视在距离就会从左右抖动变为左右横跳^-^,通过测横跳的距离就可以推出多程回波经过了几个PRT,进而消除模糊,得到目标的实际距离。这种技术叫PRF切换。我们来举个栗子(例1):
某雷达的PRF1为15kHz,则Ru为10km,雷达要探测的目标最远可能会有80km。开40个距离门(有ADC采样率决定),每个距离门代表250m。

假设第24个距离门收到了目标回波,则目标的视在距离为6km,实际距离为(6+10*n)km。消除距离模糊就要确定这个n值。

根据PRF切换技术,先发送PRF1的回波30个,再切换为PRF2再发30个回波,按照此规律循环交替。PRF2对应的Ru为10.25km,开41个距离门(ADC采样率不变),如果是多程回波,则在PRF2的周期内,相对PRF1回波位置会向左移,如果左移的距离门数为3,则n=3。可以计算出实际距离为3*10+6=36km。
解决了例子中两个目标的的模糊问题后,我们来重新计算一下最大模糊距离。单独有PRF1时Ru为10km,加上PRF2后,双重频切换时,Ru增大很多,怎么计算呢?
这其实是一个最小公倍数的问题。看一个新的例子(例2),如下图所示。
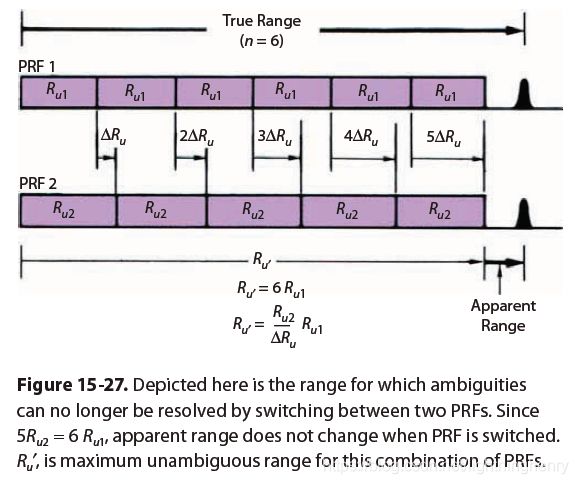
根据例2中的公式,我们来计算下例1的Ru,
Ru=(10.25/0.25)*10km=410km,最大不模糊距离扩大了41倍。实际工程中达不到这种效果,因为PRF的差值做不到只差一个距离门。更多的是像例2。
同理,我可以得出,多个重频的最大不模糊距离的计算公式:
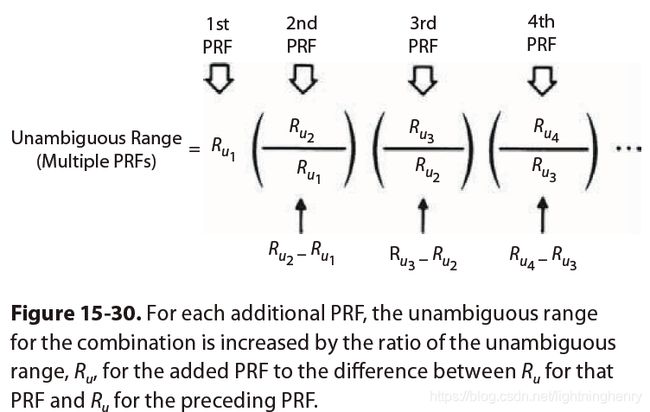
注:上面的这个公式分母写错了,箭头后面的是分母。
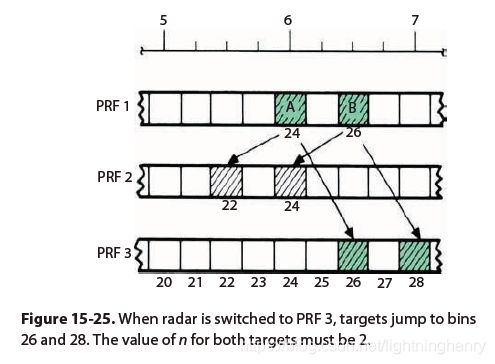
是不是觉得这样就能彻底解决距离模糊问题了?实际操作的时候你就会发现自己too young too simple。实际雷达工作中,进入雷达照射范围的目标可不是一个,特别是这几个目标的角度和速度还很接近的时候。使用PRF切换的方法,如果发生了横跳,你并不能确定左右横跳的到底是谁,如下图所示。如果不加以处理,你就像见鬼了一样,这个距离上明明没有目标,雷达却偏偏告诉你有目标,这种模糊叫做虚影,英文名直接就是见鬼(ghost)。

为了解决这一问题,需要引入第三个重频PRF3,让3个重频交替切换。这样我们就能确定是图中的A目标和B目标的真实距离了。
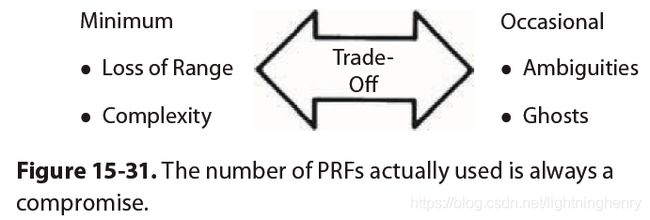
但是图中的例子只有两个目标,如果有3个呢,甚至更多呢?是的,你猜的没错,n个目标需要n+1个重频。理论上是这样的。
但是实际上,PRF一般就只有三五种。因为PRF过多会减少积累时间,导致探测距离减少,并且处理起来很麻烦。所以PRF的数量的选择是一个折衷的选择。另外,虚影也不是一直都存在的,当多目标的角度和速度不同的时候,我们还是很好区分它们的。
最后讲下单目标的距离跟踪,当搜索到目标并且确认了目标的距离以后,就可以切到单目标跟踪模式,这个时候,就只需要看两个距离门内的幅值就可以(目标位于两个距离门的中心),通过均衡两个距离门的幅值来锁定目标,实现距离跟踪。

好了,本章的扩展阅读如下:

本章的问题如下:
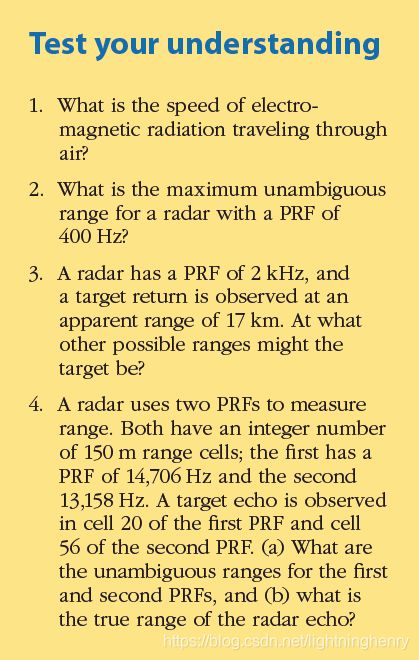
1. 电磁辐射在空气中传播的速度是多少?
答:c=3*10^8m/s,精确值在之前的文章里有提到。
2. PRF为400Hz的雷达的最大不模糊距离是多少?
答:Ru=c/PRF/2=375000m
3.一部雷达的PRF为2kHz,在视在距离17公里处观察到了目标回波。问目标的其他可能的距离是多少?
答:Ru=c/PRF/2=75km
R=n*Ru+17=(75n+17)km,n为自然数
4. 某雷达使用双重频来测量距离,一个距离门均对应150米;第一种重频为14,706 Hz,第二种重频为13,158 Hz。在第一种PRF的回波中目标位于第56个距离门,第二种PRF的回波中目标位于第20个距离门(原题这里应当写反了)。(a)两种重频下的最大不模糊距离分辨是多少? (b)雷达回波的真实距离是多少?
答:(a)Ru1= c/PRF1/2=10200m
Ru2= c/PRF2/2=11400m
(b)两种重频下差的距离门数为(Ru2- Ru1)/150=8;
n=(56-20)/8=4.5,n是小数证明在切换PRF的这段时间内,目标的相对距离产生了变化,那么n取多少呢?
假设目标是在接近雷达,则n取4;
R1=4*10200+56*150=49200m
R2=4*11400+20*150=48600m
则目标距离为48600m~49200m之间
假设目标是在远离雷达,则n取5;
R1=5*10200+56*150=59400m
R2=5*11400+20*150=60000m
则目标距离为59400m~60000m之间