算法解剖系列-Otsu二值化原理及实现
基本原理
Otsu是以统计决策为基础的;
Otsu方法在类间方差最大的情况下获取最佳阈值,达到最佳分割效果;(即,在目标与背景之间差别最大时获取的阈值)
Otsu方法是以图像的相对直方图(归一化直方图)为基础对一维阵列进行计算的;
推导大致过程:
对一幅大小为 M×N 的数字图像:
令 L 表示灰度级数;
ni 表示灰度级为 i 的像素数,则图像中像素总数 MN=n1+n2+n3+⋅⋅⋅+nL;
pi=ni/MN,pi 为相对直方图,即灰度级为 i 出现的概率。则 ∑Li=1pi=1 ;
设阈值 T(k)=k,1<k<L可以将图像分为C1和C2两类,灰度值范围分别为[1,k]和[k+1,L] 。
则被分到 C1和C2 的概率分别为:
P1(k)=∑ki=1pi(1)
P2(k)=∑Li=k+1pi=1−P1(k)(2)则被分到 C1和C2 像素的灰度均值分别为:
m1(k)=∑ki=1iP(i/C1)=∑ki=1iP(C1/i)P(i)/P(C1)=1P1(k)∑ki=1ipi(3)
m2(k)=∑Li=k+1iP(i/C2)=1P2(k)∑Li=k+1ipi(4)直至 k 级的累加均值:
m(k)=∑ki=1ipi(5)图像的灰度均值(即全局均值):
mG=∑Li=1ipi(6)
由 (3)和(4) 得:
P1m1+P2m2=mG(7)
类间方差:
σ2B=P1(m1−mG)2+P2(m2−mG)2(8)
将 (7)中的mG代入(8)中,以及由P1+P2=1 得:
σ2B=P1P2(m1−m2)2(9)
最后由 (3)(5)得m1=1P1m,由(7)得m2=mG−P1mP2,以及由P1+P2=1得 :
σ2B=(mGP1−m)2P1(P1−1)
所以要获取类间方差,只需要计算全局均值 mG、k级的累加均值m和累加概率P1 。
设 σ2G代表全局方差,η 表示可分性度量,表示可分割性:
σ2G=∑i=1L(i−mG)2pi
η=σ2Bσ2G
最终的要计算的是:
σ2B(k)=(mGP1(k)−m(k))2P1(k)(P1(k)−1)(10)
η(k∗)=σ2B(k∗)σ2G(11)
k∗是最佳阈值,即σ2B(k)为最大值的k值。
算法基本步骤
1. 计算输入图像的相对直方图:根据 pi=ni/MN ;
2. 计算像素被分到 C1累计和P1(k),根据上式(1) ;
3. 计算累计均值 m(k),根据上式(5) ;
4. 计算全局灰度均值 mG,根据上式(6) ;
5. 计算类间方差 σ2B(k),根据上式(10) ;
6. 获取最大的 σ2B(k)中的k 值,即为最佳阈值;
7. 计算可分性度量 η∗,根据上式(11) 。
算法实现
matlab 代码
close all;
clear all;
clc;
input = imread('R.png');%读图
input = rgb2gray(input);%灰度转换
L = 256;%给定灰度级
[ni, li] = imhist(input,L); %ni-各灰度等级出现的次数;li-对应的各灰度等级
% figure,plot(xi,ni);%显示绝对直方图统计
% title('绝对直方图统计')
[M,N] = size(input);%获取图像大小
MN = M*N;%像素点总数
%%Step1 计算归一化直方图
pi = ni/MN; %pi-统计各灰度级出现的概率
figure,plot(li,pi);%显示相对直方图统计
title('相对直方图统计')
%%Step2 计算像素被分到C1中的概率P1(k)
sum = 0;%用来存储各灰度级概率和
P1 = zeros(L,1);%用来存储累积概率和
for k = 1:L
sum = sum +pi(k,1);
P1(k,1) = sum;%累加概率
end
%%Step3 计算像素至K级的累积均值m(k)
sum1 = 0;%用来存储灰度均值
m = zeros(L,1);%用来存储累计均值
for k = 1:L
sum1 = sum1+k*pi(k,1);
m(k,1) = sum1;%累积均值
end
%%Step4 计算全局灰度均值mg
mg = sum1;
%%Step5 计算类间方差sigmaB2
sigmaB2 = zeros(L,1);
for k = 1:L
if(P1(k,1) == 0)
sigmaB2(k,1) = 0; %为了防止出现NaN
else
sigmaB2(k,1) = ((mg*P1(k,1)-m(k,1))^2)/(P1(k,1)*(1-P1(k,1)));
end
end
%%Step6 得到最大类间方差以及阈值
[MsigmaB2,T] = max(sigmaB2);%获取最大类间方差MsigmaB2,以及所在位置(即阈值)
output = zeros(M,N);%定义二值化输出图像
for i = 1:M
for j = 1:N
if input(i,j)>T
output(i,j) = 1;
else
output(i,j)=0;
end
end
end
figure,imshow(output);%显示结果
%%Step7 可分性度量eta
sigmaG2 = 0;%全局方差
for k = 1:L
sigmaG2 = sigmaG2+(k-mg)^2*pi(k,1);
end
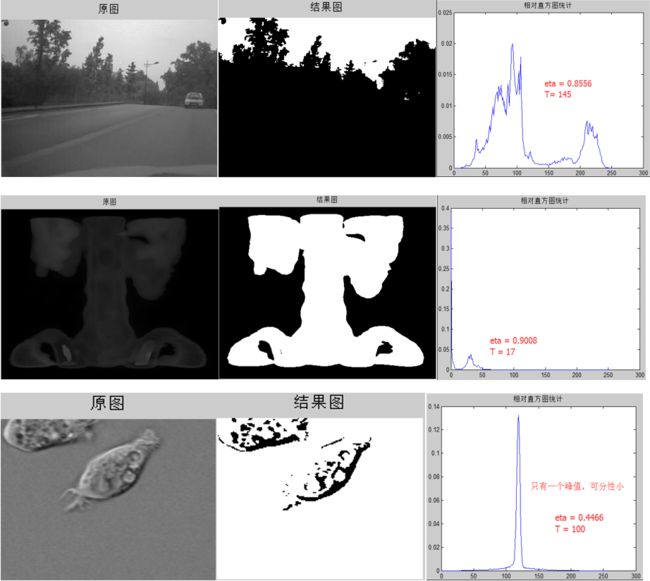
eta = MsigmaB2/sigmaG2;效果图