关于CRNN文本识别算法的理解
一、简介
常用文本识别算法有两种:
- CNN+RNN+CTC(CRNN+CTC)
- CNN+Seq2Seq+Attention
其中CTC与Attention相当于是一种对齐方式,具体算法原理比较复杂,就不做详细的探讨。其中CTC可参考这篇博文,关于Attention机制的介绍,可以参考我的另一篇博文。

CRNN 全称为 Convolutional Recurrent Neural Network,在2015年被提出,是一种卷积循环神经网络结构,用于解决基于图像的序列识别问题,特别是场景文字识别问题。最大的特点就是不用先对单个文字进行切割,而是将文本识别转化为时序依赖的序列学习问题,就是基于图像的序列识别。
文章认为文字识别是对序列的预测方法,所以采用了对序列预测的RNN网络。通过CNN将图片的特征提取出来后采用RNN对序列进行预测,最后通过一个CTC的翻译层得到最终结果。
论文地址:An End-to-End Trainable Neural Network for Image-based Sequence Recognition and Its Application to Scene Text Recognition
二、细节
CRNN共由三部分组成,包括卷积层(CNN)、循环层(RNN)、CTC loss层。结构图如下:
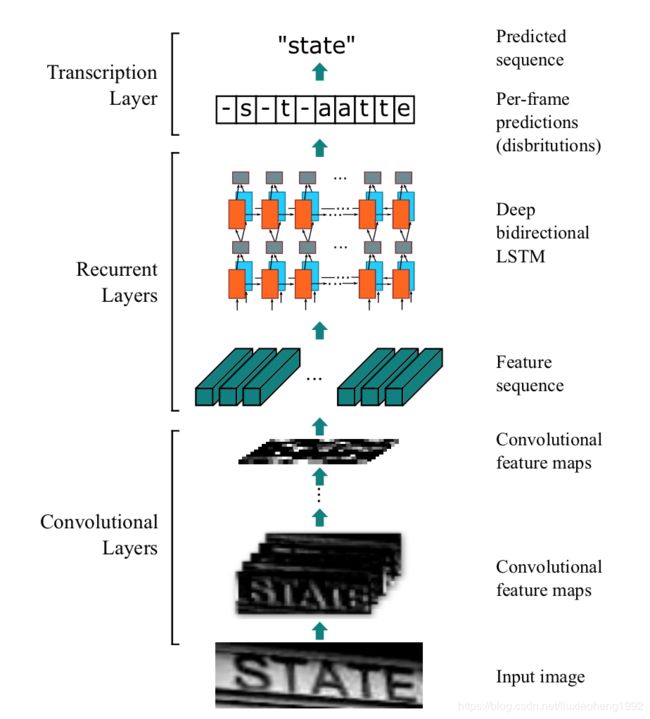
其中卷积层用CNN提取特征,循环层使用双向RNN(BLSTM)对特征序列进行预测,对序列中的每个特征向量进行学习,并输出预测标签(真实值)分布,CTC转录层则是使用 CTC 损失,把从循环层获取的一系列标签分布转换成最终的标签序列。
1、卷积层
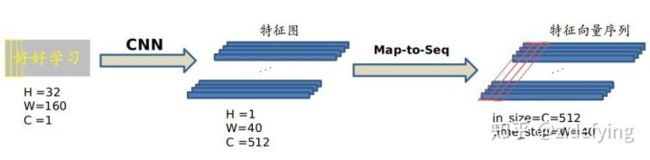
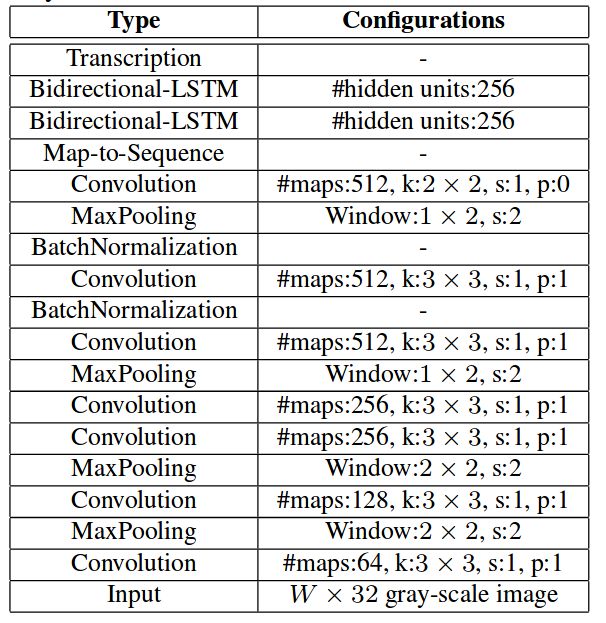
卷积层共包含7层卷积神经网络,基础结构是VGG结构,其中输入是把灰度图缩放到尺寸为W*32,即固定高。值得注意的是在第三个和第四个池化层的时候,为了追求真实的高宽比例,采用的核尺寸为1x2(并非2x2)。为了加速收敛并引入了BN层。
把CNN提取到的特征图按列切分(MaptoSequence)每一列的512维特征,输入到两层各256单元的双向LSTM进行分类。在训练过程中,通过CTC损失函数的指导,实现字符位置与类标的近似软对齐。
示例:
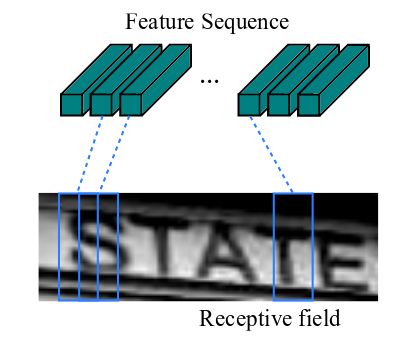
现在需要从 CNN 模型产生的特征图中提取特征向量序列,每一个特征向量(如上图中的一个红色框)在特征图上按列从左到右生成,每一列包含512维特征,这意味着第 i 个特征向量是所有的特征图第 i 列像素的连接,这些特征向量就构成一个序列。
由于卷积层,最大池化层和激活函数在局部区域上执行,因此它们是平移不变的。因此,特征图的每列(即一个特征向量)对应于原始图像的一个矩形区域(称为感受野),并且这些矩形区域与特征图上从左到右的相应列具有相同的顺序。特征序列中的每个向量关联一个感受野。
提取的特征序列中的向量是从特征图上从左到右按照顺序生成的,每个特征向量表示了图像上一定宽度上的特征,论文中使用的这个宽度是1,就是单个像素。
文中举例说明了,如果一张包含10个字符的图片大小为100×32,经过上述的CNN网络得到的特征尺度为25×1(这里忽略通道数),这样得到一个序列,每一列特征对应原图的一个矩形区域(如下图所示),这样就很方便作为RNN的输入进行下一步的计算了,而且每个特征与输入有一个一对一的对应关系。
假设现在输入有个图像,为了将特征输入到Recurrent Layers,做如下处理:
- 首先会将图像缩放到 32×W×1 大小
- 然后经过CNN后变为 1×(W/4)× 512
- 接着针对LSTM,设置 T=(W/4) , D=512 ,即可将特征输入LSTM。
- LSTM有256个隐藏节点,经过LSTM后变为长度为T × nclass的向量,再经过softmax处理,列向量每个元素代表对应的字符预测概率,最后再将这个T的预测结果去冗余合并成一个完整识别结果即可。
2、循环层
因为 RNN 有梯度消失的问题,不能获取更多上下文信息,所以 CRNN 中使用的是 LSTM,LSTM 的特殊设计允许它捕获长距离依赖。
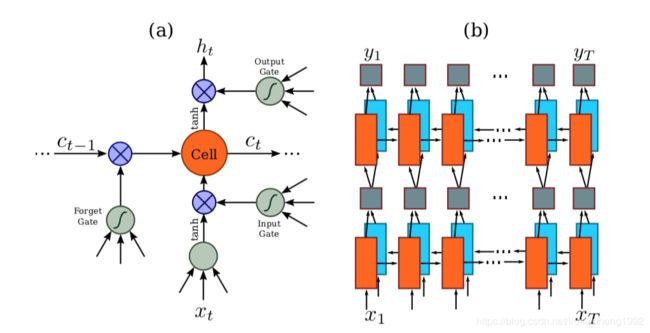
RNN网络是对于CNN输出的特征序列 x = x 1 , ⋯ , x t x=x1 ,⋯,xt x=x1,⋯,xt,每一个输入 x t x_{t} xt都有一个输出 y t y_{t} yt为了防止训练时梯度的消失,文章采用了LSTM神经单元作为RNN的单元。文章认为对于序列的预测,序列的前向信息和后向信息都有助于序列的预测,所以文章采用了双向RNN网络。LSTM神经元的结构和双向RNN结构如下图所示。
示例:
通过上面一步,我们得到了40个特征向量,每个特征向量长度为512,在 LSTM 中一个时间步就传入一个特征向量进行分类,这里一共有40个时间步。
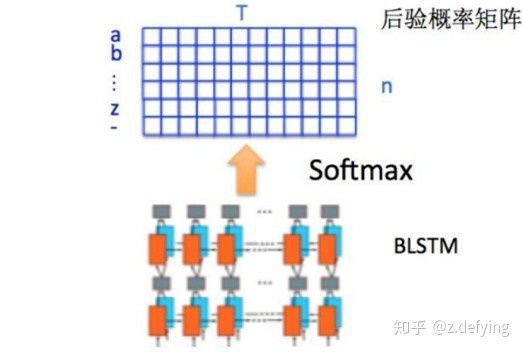
我们知道一个特征向量就相当于原图中的一个小矩形区域,RNN 的目标就是预测这个矩形区域为哪个字符,即根据输入的特征向量,进行预测,得到所有字符的softmax概率分布,这是一个长度为字符类别数的向量,作为CTC层的输入。
因为每个时间步都会有一个输入特征向量 ,输出一个所有字符的概率分布 ,所以输出为 40 个长度为字符类别数的向量构成的后验概率矩阵,然后将这个后验概率矩阵传入转录层。
这部分代码如下:
self.rnn = nn.Sequential(
BidirectionalLSTM(512, nh, nh),
BidirectionalLSTM(nh, nh, nclass))
nh=256
nclass = len(opt.alphabet) + 1
nc = 1
class BidirectionalLSTM(nn.Module):
def __init__(self, nIn, nHidden, nOut):
super(BidirectionalLSTM, self).__init__()
self.rnn = nn.LSTM(nIn, nHidden, bidirectional=True)
self.embedding = nn.Linear(nHidden * 2, nOut)
def forward(self, input):
recurrent, _ = self.rnn(input)
T, b, h = recurrent.size()
t_rec = recurrent.view(T * b, h)
output = self.embedding(t_rec) # [T * b, nOut]
output = output.view(T, b, -1)
return output
#所以第一次LSTM得到的output=[40*256,256],然后view成output=[40,256,256]
#第二次LSTM得到的结果是output=[40*256,nclass],然后view成output=[40,256,nclass]
3、转录层
端到端OCR识别的难点在于怎么处理不定长序列对齐的问题!(因为是不定长序列,按照以前的方法我们很难去计算loss,如果是定长的话容易造成信息的丢失,而且局限性太大!)
转录是将 RNN 对每个特征向量所做的预测转换成标签序列的过程。数学上,转录是根据每帧预测找到具有最高概率组合的标签序列。
具体可参考上面链接!
测试时,翻译分为两种,一种是带字典的,一种是没有字典的。
带字典的就是在测试的时候,测试集是有字典的,测试的输出结果计算出所有字典的概率,取最大的即为最终的预测字符串
不带字典的,是指测试集没有给出测试集包含哪些字符串,预测时就选取输出概率最大的作为最终的预测字符串。