维基百科介绍: http://en.wikipedia.org/wiki/Kdtree
KD树是一种能在 O(N) 时间内把平面划分成若干个区域,然后在均摊 O(logN) 的时间内找到某个区域内所有点的数据结构。
其思想是,每次把当前处理的区域按照点数分成两部分,然后对两部分进行递归处理。。。
分成两部分有两种策略:
一种是横着竖着横着竖着交替划分。。
一种是把坐标跨度大的那一维划分成两部分。
似乎没什么影响。
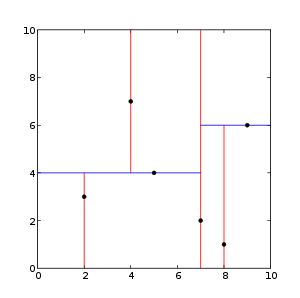
上图是一种可行的划分方式。每次找到当前处理点集中的中点,以这个中点为分界线把区间划分成两部分和。注意中点是作为分界线不参与下一轮处理。
查询一个点的最近点时,首先令最近距离为,然后在KD树中查找,首先和当前区间的中点求一次距离更新答案,然后再根据该点和中点的关系决定是去左区间还是右区间,如果正好在分界线上那么两边都过去吧。
这里还有个问题,可能点被分到了左区间,但是可能和右区间的某个点比较近。那么怎么办。?
假设这个点到分界线的距离已经是大于等于当前最优答案了,那么另一个区间的所有点到这个点的距离都比当前最优答案远,只有这时候不需要考虑另一个区间。
复杂度分析均摊下来的确是 O(N),详情可以参观一下《计算几何:算法与应用》那本书。
STL中提供了一个叫做nth_element的函数,可以在O(n)的复杂度下找到序列的第k大数并且把序列以第k大为界分为两半,用这个就能写出很短的建树过程了。
bool Div[MaxN];\\记录这个区间是用什么体位划分的 void BuildKD(int l, int r, Point p[])\\记得备份一下p { if (l > r) return; int mid = l + r >> 1; int minX, minY, maxX, maxY; minX = min_element(p + l, p + r + 1, cmpX)->x; minY = min_element(p + l, p + r + 1, cmpY)->y; maxX = max_element(p + l, p + r + 1, cmpX)->x; maxY = max_element(p + l, p + r + 1, cmpY)->y; Div[mid] = (maxX - minX >= maxY - minY); nth_element(p + l, p + mid, p + r + 1, Div[mid] ? cmpX : cmpY); BuildKD(l, mid - 1, p); BuildKD(mid + 1, r, p); } 查找的时候照着思路写就可以了。 void Find(int l, int r, Point a, Point p[]) { if (l > r) return; int mid = l + r >> 1; long long dist = dist2(a, p[mid]); if (dist > 0)//如果有重点不能这样判断 res = min(res, dist); long long d = Div[mid] ? (a.x - p[mid].x) : (a.y - p[mid].y); int l1, l2, r1, r2; l1 = l, l2 = mid + 1; r1 = mid - 1, r2 = r; if (d > 0) swap(l1, l2), swap(r1, r2); Find(l1, r1, a, p); if (d * d < res) Find(l2, r2, a, p); }
这份KD树是参照佐倉杏子的代码学习的。Orz。
相关题目:In case of failure
#include#include using namespace std; const int N = 100000; struct Point{ int x,y; }p[N+10],tmp[N+10]; int Div[N+10]; long long ret; int cmpx(const Point &a,const Point &b){ return a.x < b.x; } int cmpy(const Point &a,const Point &b){ return a.y < b.y; } void Build(int l,int r,Point Q[]){ if(l > r) return; int m = (l+r)>>1; int minx = min_element(Q+l,Q+r+1,cmpx)->x; int miny = min_element(Q+l,Q+r+1,cmpy)->y; int maxx = max_element(Q+l,Q+r+1,cmpx)->x; int maxy = max_element(Q+l,Q+r+1,cmpy)->y; Div[m] = (maxx-minx) >= (maxy-miny); nth_element(Q+l,Q+m,Q+r+1,(Div[m]?cmpx:cmpy)); Build(l,m-1,Q); Build(m+1,r,Q); } long long dis(Point a,Point b){ return 1LL*abs(a.x-b.x)*abs(a.x-b.x)+1LL*abs(a.y-b.y)*abs(a.y-b.y); } void find(int l,int r,Point q){ if(l > r) return; int m = (l+r)>>1; long long dist = dis(q,tmp[m]); if( dist > 0 ) ret = min(ret,dist); int d = Div[m] ? (q.x-tmp[m].x) : (q.y-tmp[m].y); int l1,l2,r1,r2; l1 = l, r1 = m-1; l2 = m+1,r2 = r; if(d > 0) swap(l1,l2),swap(r1,r2); find(l1,r1,q); if( 1LL*d*d < ret ) find(l2,r2,q); } int main(){ int t,n; scanf("%d",&t); while(t-- && scanf("%d",&n)){ for(int i = 0; i < n; i++) scanf("%d%d",&p[i].x,&p[i].y); memcpy(tmp,p, sizeof(p)); Build(0,n-1,tmp); for(int i = 0; i < n; i++){ ret = (1LL<<60); find(0,n-1,p[i]); printf("%I64d\n",ret); } }
return 0;
}