【CPG控制】Hopf振荡器之间的耦合
一、前情回顾
现在我们的hopf振荡器的数学模型如下:
d x d t = α ( μ − r 2 ) x − ω y d y d t = α ( μ − r 2 ) y + ω x r 2 = x 2 + y 2 ω = ω s t e − a y + 1 + ω s w e a y + 1 ω s t = 1 − β β ω s w \begin{matrix} \frac{dx}{dt}=& \alpha(\mu-r^2)x-\omega y\\ \\ \frac{dy}{dt}=& \alpha(\mu-r^2)y + \omega x\\ \\ r^2= & x^2 + y^2\\ \\ \omega=&\frac{\omega{st}}{e^{-ay}+1}+ \frac{\omega_{sw}}{e^{ay}+1} \\ \\ \omega_{st} =& \frac{1-\beta}{\beta}\omega_{sw} \end{matrix} dtdx=dtdy=r2=ω=ωst=α(μ−r2)x−ωyα(μ−r2)y+ωxx2+y2e−ay+1ωst+eay+1ωswβ1−βωsw
我们可以这样理解,它输出的是单个点P的位置[x,y]:
在实际使用时,该点P位置可作为机器人参考系下的位置点,也可作为关节的角度值,但是需要根据实际情况进行一系列变换,往后我们会讨论这个问题,现在我们先把目光集中在hopf振荡器本身。
1、北理大的CPG控制网络
四足机器人,顾名思义,有四条腿,不考虑横向的髋关节的话我们仍有8个自由度,因此也就需要8个控制指令,而我们的振荡器有2个输出值,所以,我们需要使用4个hopf振荡器,分别对应每一条腿。
强调一下,这种方法是北京理工大学《仿生四足机器人技术》里面提出的CPG控制网络模型,这在我的第一篇文章里面也已经介绍过了
我们将各腿关系整理一下,这里将各个振荡器的x值作为髋关节的角度值,y值作为膝关节的角度值,如下图:
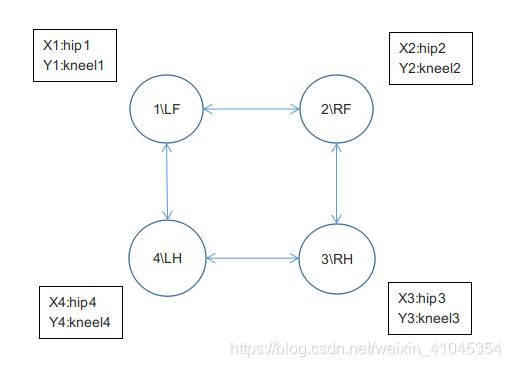
各腿的相位图:

整理之后的数学模型,我们写成微分方程的形式,其实就是在之前的模型上加入了一个耦合项:
d x i d t = α ( μ − r i 2 ) x i 2 − ω i y i + ∑ j = 1 4 ( cos θ j i x j − sin θ j i y j ) \frac{dx_i}{dt} = \alpha(\mu-r_i^2)x_i^2 - \omega_iy_i+ \sum_{j=1}^{4}(\cos\theta^i_jx_j-\sin\theta_j^iy_j) dtdxi=α(μ−ri2)xi2−ωiyi+j=1∑4(cosθjixj−sinθjiyj)
d y i d t = α ( μ − r i 2 ) y i 2 + ω i x i + ∑ j = 1 4 ( sin θ j i x j + cos θ j i y j ) \frac{dy_i}{dt} = \alpha(\mu-r_i^2)y_i^2 + \omega_ix_i+ \sum_{j=1}^{4}(\sin \theta^i_jx_j+\cos \theta_j^iy_j) dtdyi=α(μ−ri2)yi2+ωixi+j=1∑4(sinθjixj+cosθjiyj)
其中, i = 1 , 2 , 3 , 4 i=1,2,3,4 i=1,2,3,4,分别表征各条腿对应的id, θ j i = 2 π ( φ i − φ j ) \theta_j^i=2\pi(\varphi_i - \varphi_j) θji=2π(φi−φj)
关于耦合项无效问题
我们设定相位关系为,phase = [0, 0.5, 0.25, 0.75],
经过我的多次试验,耦合项会在某些情况下无效,这其实跟初始值有关,例如,当我们设P0_ = [1, 1, 1, 1, 0, 0, 0, 0],我们得到的曲线会是如下:
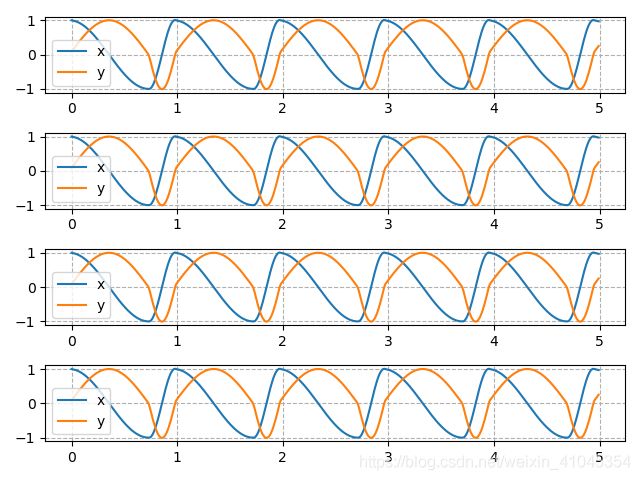
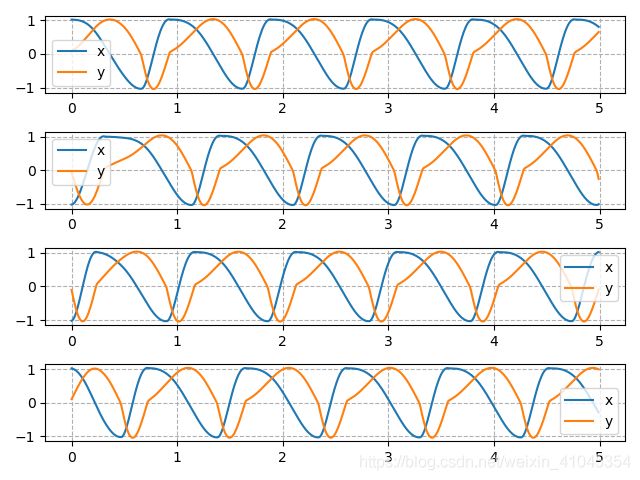
在上面这种情况下,可以看出输出信号其实是一致的,当我们把初始值设为P0_ = [1, -1, -1, 1, 0, 0, 0, 0],我们得到的曲线会是如下,此时满足相位关系。:
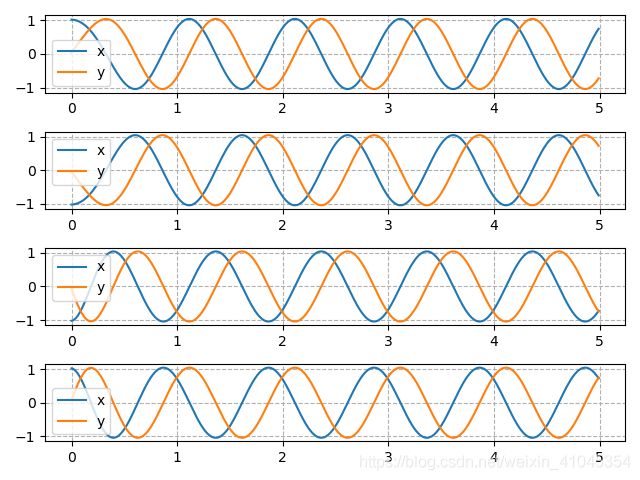
为了便于观察,我们将 β \beta β设为0.5(其余参数均保持一致),相位关系仍然是phase = [0, 0.5, 0.25, 0.75], 初始值仍为P0_ = [1, -1, -1, 1, 0, 0, 0, 0]
我把核心代码放在这,大家可以自行试验:
- hopf振荡器核心:
def hopf(pos, steps):
x1, x2, x3, x4, y1, y2, y3, y4 = pos
alpha, mu, beta, omega_sw = get_parms()
omega_st = ((1 - beta) / beta) * omega_sw
T = np.pi / omega_st + np.pi / omega_sw
x = np.array([x1, x2, x3, x4])
y = np.array([y1, y2, y3, y4])
r = x ** 2 + y ** 2
omega = omega_st / (np.e ** (-50*y) + 1) + omega_sw / (np.e ** (50*y) + 1)
r_x, r_y = get_r(x, y)
dx = alpha * (mu - r) * x - omega * y + r_x
dy = alpha * (mu - r) * y + omega * x + r_y
temp = np.hstack((x+dx*steps, y+dy*steps))
return temp
参数:
def get_parms():
alpha = 50
mu = 1
beta = 0.5
omega_sw = 2*np.pi
return [alpha, mu, beta, omega_sw]
耦合项:
def get_theta():
theta = np.zeros([4, 4])
for i in range(4):
for j in range(4):
theta[i, j] = (phase[i] - phase[j])
return 2 * np.pi * theta
def get_r(x, y):
r_x = np.zeros([4, 4])
r_y = np.zeros([4, 4])
theta = get_theta()
for i in range(4):
for j in range(4):
r_x[i, j] = np.cos(theta[i, j])*x[j] + np.sin(theta[i, j])*y[j]
r_y[i, j] = -np.sin(theta[i, j])*x[j] + np.cos(theta[i, j])*y[j]
return np.sum(r_x, axis=1), np.sum(r_y, axis=1)
2、基于坐标变换(试验)
这种方法只是应用于对称信号,因此不是完善的方法
我们在前面已经强调过一个很重要的概念,我们可以把hopf振荡器输出值当做是一个点的坐标。我们以三角函数距离说明,点P1位置[x,y]跟时间有以下关系:
{ x = sin ( t ) y = cos ( t ) \left\{\begin{matrix} x=\sin(t)\\ y=\cos(t) \end{matrix}\right. {x=sin(t)y=cos(t)
它的运动是这样的:

现在多加一个点P2,让其与P1的连线穿过圆心(即,在P1对面),该如和表示该点的运动呢?
答案很简单,让P1绕圆心旋转180°就行了,也就是说P2点的角度适终与P1相差 π \pi π。放到整个时间线上来说就是,我们对P1点每一时刻的位置信号进行旋转变换得到P2点的信号。
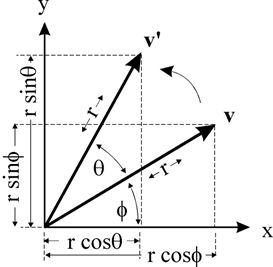
通过公式表示如下:
[ x ′ y ′ ] = [ c o s θ − s i n θ s i n θ c o s θ ] [ x y ] \begin{bmatrix} x'\\ y' \end{bmatrix} = \begin{bmatrix} cos \theta & -sin\theta\\ sin\theta & cos\theta \end{bmatrix}\begin{bmatrix} x\\ y \end{bmatrix} [x′y′]=[cosθsinθ−sinθcosθ][xy]
让 θ = π \theta=\pi θ=π计算得到点
P2点的运动曲线:

我们可以不断地对P1点的信号作变换得到新的信号,而且相位由旋转角度 θ \theta θ决定。

