分支定界法——0-1背包问题
问题描述:
给定n种物品和一背包。物品i的重量是wi,其价值为vi,背包的容量为C。问:应如何选择装入背包的物品,使得装入背包中物品的总价值最大?
算法设计分析:
和回溯法中的界定函数类似,对每一个活动节点N,计算收益的上限maxPossibleProfitInSubtree,使得以N为根的子树中,任何一个节点的收益都不可能超过这个值。
活动节点使用大根堆maxHeap,按需构造解空间树——子集树。
大根堆元素heapNode结构:
upperProfit //以该节点为根的子树中任一节点的收益上限
profit //该节点目前的收益值
weight //该节点目前的重量
level //该节点在解空间树的层数
liveNode //指向解空间树的节点(树的节点数据成员包括:
// 指向父节点的parent指针和布尔类型leftChild,当且仅当此节点是左孩子时为true)
节点按其upperProfit值从大根堆中取出。
算法步骤:
1、将背包装载对象按收益密度递增顺序排序;
2、检查左孩子节点,若左孩子可行(左孩子的目前重量小于总的capacity),向大根堆中添加此节点;
3、检查右孩子节点,当且仅当右孩子的maxPossibleProfitInSubtree值大于目前的最大收益时,右孩子可行,将右孩子加入大根堆;
4、从大根堆中取出一个新元素(upperProfit值最大的节点),重复2、3步骤直到最后一层节点;
5、沿着最后一个节点到根节点路径构造最佳0/1背包解。
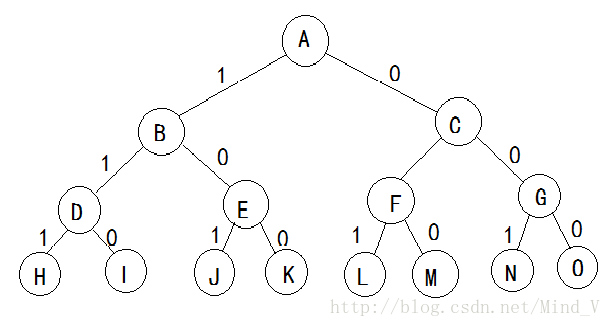
例如:0/1背包问题,当n=3时,w={20,15,15}, p={40,25,25}, c=30。收益密度{2, 5/3, 5/3}。大根堆分支界定法:收益大的优先。
队列中的元素:{}—>{A}—>{B,C}—>{C,D,E}—>{C,E}—>{C,J,K}—>{C}—>{F,G}—>{G,L,M}—>{G,M}—>{G}—>{N,O}—>{O}—>{}
C++实现
解空间树的节点结构:
struct bbNode
{
// data members
bbNode* parent; // pointer to parent node
bool leftChild; // true iff left child of parent
// constructor
bbNode(bbNode* theParent, bool theLeftChild)
{
parent = theParent;
leftChild = theLeftChild;
}
};大根堆的元素类型:
struct heapNode
{
// data members
bbNode* liveNode;
double upperProfit;
double profit;
double weight;
int upperWeight; // upper weight of live node
int level; // level of live node
// constructors
heapNode() {};
heapNode(bbNode* theLiveNode, double theUpperProfit,
double theProfit, double theWeight, int theLevel)
{
liveNode = theLiveNode;
upperProfit = theUpperProfit;
profit = theProfit;
weight = theWeight;
level = theLevel;
}
operator<(const heapNode right)
{return upperProfit < right.upperProfit;}
// type conversion to enable arithmetics etc.
operator double() {return upperProfit;}
};算法程序:
// global variables
double capacity;
int numberOfObjects;
double *weight;
double *profit;
double weightOfCurrentPacking;
double profitFromCurrentPacking;
int *bestPackingSoFar;
maxHeap liveNodeMaxHeap;
double maxProfitBBKnapsack()
{// Max-profit branch-and-bound search of solution space tree.
// Set bestPackingSoFar[i] = 1 iff object i is in knapsack in best filling.
// Return profit of best knapsack filling.
// initialize for level 1 start
bbNode* eNode = NULL;
int eNodeLevel = 1;
double maxProfitSoFar = 0.0;
double maxPossibleProfitInSubtree = profitBound(1);
// search subset space tree
while (eNodeLevel != numberOfObjects + 1)
{// not at leaf
// check left child
double weightOfLeftChild = weightOfCurrentPacking
+ weight[eNodeLevel];
if (weightOfLeftChild <= capacity)
{// feasible left child
if (profitFromCurrentPacking + profit[eNodeLevel]
> maxProfitSoFar)
maxProfitSoFar = profitFromCurrentPacking
+ profit[eNodeLevel];
addLiveNode(maxPossibleProfitInSubtree,
profitFromCurrentPacking + profit[eNodeLevel],
weightOfCurrentPacking + weight[eNodeLevel],
eNodeLevel + 1, eNode, true);
}
maxPossibleProfitInSubtree = profitBound(eNodeLevel + 1);
// check right child
if (maxPossibleProfitInSubtree >= maxProfitSoFar)
// right child has prospects
addLiveNode(maxPossibleProfitInSubtree,
profitFromCurrentPacking,
weightOfCurrentPacking,
eNodeLevel + 1, eNode, false);
// get next E-node, heap cannot be empty
heapNode nextENode = liveNodeMaxHeap.top();
liveNodeMaxHeap.pop();
eNode = nextENode.liveNode;
weightOfCurrentPacking = nextENode.weight;
profitFromCurrentPacking = nextENode.profit;
maxPossibleProfitInSubtree = nextENode.upperProfit;
eNodeLevel = nextENode.level;
}
// construct bestPackingSoFar[] by following path
// from eNode to the root
for (int j = numberOfObjects; j > 0; j--)
{
bestPackingSoFar[j] = (eNode->leftChild) ? 1 : 0;
eNode = eNode->parent;
}
return profitFromCurrentPacking;
}
double knapsack(double *theProfit, double *theWeight, int theNumberOfObjects, double theCapacity, int *bestPacking)
{// theProfit[1:theNumberOfObjects] is array of object profits
// theWeight[1:theNumberOfObjects] is array of object weights
// theCapacity is knapsack capacity
// bestPacking[1:theNumberOfObjects] is set to best knapsack filling.
// Return profit of best filling.
capacity = theCapacity;
numberOfObjects = theNumberOfObjects;
// define an element array for profit densities
element *q = new element [numberOfObjects];
// set up densities in q[0:numberOfObjects-1] and
// sum the weights and profits
double weightSum = 0.0; // will be sum of weights
double profitSum = 0.0; // will be sum of profits
for (int i = 1; i <= numberOfObjects; i++)
{
q[i - 1] = element(i, theProfit[i] / theWeight[i]);
profitSum += theProfit[i];
weightSum += theWeight[i];
}
if (weightSum <= capacity) // all objects fit
{
fill(bestPacking + 1, bestPacking + numberOfObjects + 1, 1);
return profitSum;
}
// sort into increasing density order
sort(q, q + numberOfObjects);
// initialize globals
profit = new double [numberOfObjects + 1];
weight = new double [numberOfObjects + 1];
for (int i = 1; i <= numberOfObjects; i++)
{// profits and weights in decreasing density order
profit[i] = theProfit[q[numberOfObjects - i].id];
weight[i] = theWeight[q[numberOfObjects - i].id];
}
weightOfCurrentPacking = 0.0;
profitFromCurrentPacking = 0.0;
bestPackingSoFar = new int [numberOfObjects + 1];
// find best profit and construct packing
double maxProfit = maxProfitBBKnapsack();
for (int i = 1 ; i <= numberOfObjects; i++)
bestPacking[q[numberOfObjects - i].id] = bestPackingSoFar[i];
return maxProfit;
} 添加节点addLiveNode( ):
void addLiveNode(double upperProfit, double theProfit,
double theWeight, int theLevel, bbNode* theParent,
bool leftChild)
{// Add a new live node to the max heap.
// Also add the new node to the solution space tree.
// upperProfit = upper bound on profit for the live node.
// theProfit = profit of new live node.
// theWeight = weight of new live node.
// theLevel = level of live node.
// theParent = parent of new node.
// leftChild is true iff new node is left child of theParent.
// create the new node of the solution space tree
bbNode* b = new bbNode(theParent, leftChild);
// put corresponding heap node into max heap
liveNodeMaxHeap.push(heapNode(b, upperProfit, theProfit,
theWeight, theLevel));
}界定函数profitBound():
double profitBound(int currentLevel)
{// Bounding function.
// Return upper bound on value of best leaf in subtree.
double remainingCapacity = capacity - weightOfCurrentPacking;
double profitBound = profitFromCurrentPacking;
// fill remaining capacity in order of profit density
while (currentLevel <= numberOfObjects &&
weight[currentLevel] <= remainingCapacity)
{
remainingCapacity -= weight[currentLevel];
profitBound += profit[currentLevel];
currentLevel++;
}
// take fraction of next object
if (currentLevel <= numberOfObjects)
profitBound += profit[currentLevel] /
weight[currentLevel] * remainingCapacity;
return profitBound;
}大根堆的部分源码maxHeap.h:
// heap implementation of a max priority queue
// derives from the ADT maxPriorityQueue
#ifndef maxHeap_
#define maxHeap_
#include ::maxHeap(int initialCapacity)
{// Constructor.
if (initialCapacity < 1)
{
cout << "Initial capacity = " << initialCapacity << " Must be > 0";
exit(1);
}
arrayLength = initialCapacity + 1;
heap = new T[arrayLength];
heapSize = 0;
}
template<class T>
void maxHeap::push(const T& theElement)
{// Add theElement to heap.
// increase array length if necessary
if (heapSize == arrayLength - 1)
{// double array length
changeLength1D(heap, arrayLength, 2 * arrayLength);
arrayLength *= 2;
}
// find place for theElement
// currentNode starts at new leaf and moves up tree
int currentNode = ++heapSize;
while (currentNode != 1 && heap[currentNode / 2] < theElement)
{
// cannot put theElement in heap[currentNode]
heap[currentNode] = heap[currentNode / 2]; // move element down
currentNode /= 2; // move to parent
}
heap[currentNode] = theElement;
}
template<class T>
void maxHeap::pop()
{// Remove max element.
// if heap is empty return null
if (heapSize == 0) // heap empty
{
cout << "heap is empty!" << endl;
exit(1);
}
// Delete max element
heap[1].~T();
// Remove last element and reheapify
T lastElement = heap[heapSize--];
// find place for lastElement starting at root
int currentNode = 1,
child = 2; // child of currentNode
while (child <= heapSize)
{
// heap[child] should be larger child of currentNode
if (child < heapSize && heap[child] < heap[child + 1])
child++;
// can we put lastElement in heap[currentNode]?
if (lastElement >= heap[child])
break; // yes
// no
heap[currentNode] = heap[child]; // move child up
currentNode = child; // move down a level
child *= 2;
}
heap[currentNode] = lastElement;
}
#endif