张正友相机标定法的原理详述+标定相机参数的实现(Python+OpenCV)
张正友相机标定法的原理详述+标定相机参数的实现(Python+OpenCV)
- 原理详解
- 相机的内参数
- 单应矩阵
- 内参约束条件
- 求解内参数
- 最大似然估计
- 消除径向畸变
- openCV相机标定
原理详解
张正友于1998年在论文:"A Flexible New Technique fro Camera Calibration"提出了基于单平面棋盘格的相机标定方法。该方法介于传统的标定方法和自标定方法之间,使用简单实用性强,有以下优点:
- 不需要额外的器材,一张打印的棋盘格即可。
- 标定简单,相机和标定板可以任意放置。
- 标定的精度高。
相机的内参数
设 P = ( X , Y , Z ) P=(X,Y,Z) P=(X,Y,Z) 为场景中的一点,进行下面几个步骤:
- 将 P P P 从世界坐标系通过刚体变换变换到相机坐标系,这个变换过程使用的是相机间的相对位姿,也就是相机的外参数。
- 从相机坐标系,通过透视投影变换到相机的成像平面上的像点p=(x,y)。
- 将像点p从成像坐标系,通过缩放和平移变换到像素坐标系上点p=(μ,ν)。
我们就可以将场景中的三维点转换成图像中的二维点了。上述的变换步骤转换成具体的数学形式: s ( μ ν 1 ) = [ α 0 c x 0 β c y 0 0 1 ] [ f 0 0 0 0 f 0 0 0 0 1 0 ] [ R t 0 T 1 ] ( X Y Z 1 ) = [ f x 0 c x 0 0 f y c y 0 0 0 1 0 ] [ R t 0 T 1 ] ( X Y Z 1 ) \ s\left(\begin{array}{c}\mu\\ \nu \\ 1\end{array}\right) = \left[\begin{array}{ccc}\alpha & 0 &c_x \\ 0 & \beta & c_y \\ 0 & 0 & 1\end{array}\right] \left[\begin{array}{cccc}f&0&0&0\\0&f&0&0\\0&0&1&0\end{array}\right] \left[\begin{array}{cc}R&t\\0^T&1\end{array}\right] \left(\begin{array}{c}X\\Y\\Z\\1\end{array}\right) \\ = \left[\begin{array}{cccc}f_x&0&c_x&0\\0&f_y&c_y&0\\0&0&1&0\end{array}\right]\left[\begin{array}{cc}R&t\\0^T&1\end{array}\right] \left(\begin{array}{c}X\\Y\\Z\\1\end{array}\right) s⎝⎛μν1⎠⎞=⎣⎡α000β0cxcy1⎦⎤⎣⎡f000f0001000⎦⎤[R0Tt1]⎝⎜⎜⎛XYZ1⎠⎟⎟⎞=⎣⎡fx000fy0cxcy1000⎦⎤[R0Tt1]⎝⎜⎜⎛XYZ1⎠⎟⎟⎞
将矩阵 K K K称为相机的内参数,
K = [ f x 0 c x 0 f y c y 0 0 1 ] \ K = \left[\begin{array}{ccc}f_x&0&c_x\\0&f_y&c_y\\0&0&1\end{array}\right] K=⎣⎡fx000fy0cxcy1⎦⎤
单应矩阵
在张氏标定法中,用于标定的棋盘格是三维场景中的一个平面 Π Π Π ;其在成像平面的像是另一个平面 π π π ,由于棋盘格的角点是已知的,我们可以通过角点提取算法获得图像中的角点,知道了两个平面的对应点的坐标,就可以求解得到两个平面的单应矩阵 H H H。
通过上面的相机模型有:
p = K [ R ∣ t ] P \ p = K[R|t]P p=K[R∣t]P
其中p是像点坐标,P是标定的棋盘坐标。 这样就可以得到下面的等式:
H = K [ R ∣ t ] \ H = K[R|t] H=K[R∣t]
H H H 表示的是成像平面和标定棋盘平面之间的单应矩阵。通过对应的点对解得H后,则可以通过上面的等式得到相机的内参数 K K K,以及外参旋转矩阵 R R R和平移向量 t t t。
将一个平面映射到另一个平面,将棋盘格所在的平面映射到相机的成像平面,可以获得公式:
p = H P \ p = HP p=HP
其中 p p p 为棋盘格所成像的像点坐标, P P P 棋盘格角点在世界坐标系的坐标。
设棋盘格所在的平面为世界坐标系中 Z = 0 Z=0 Z=0的平面,则根据相机模型:
s ( u v 1 ) = K [ R t ] ( X Y 0 1 ) = K [ r 1 r 2 r 3 t ] ( X Y 0 1 ) = K [ r 1 r 2 t ] ( X Y 1 ) \ s\left( \begin{array}{c} u \\ v \\1 \end{array} \right) = K\left[\begin{array}{c}R&t\end{array}\right]\left( \begin{array}{c} X \\ Y \\ 0 \\ 1 \end{array} \right) = K[\begin{array}{c}r_1&r_2&r_3&t\end{array}]\left(\begin{array}{c} X \\ Y \\ 0 \\ 1 \end{array} \right) = K[\begin{array}{c}r_1&r_2&t\end{array}]\left(\begin{array}{c} X \\ Y \\ 1 \end{array} \right) s⎝⎛uv1⎠⎞=K[Rt]⎝⎜⎜⎛XY01⎠⎟⎟⎞=K[r1r2r3t]⎝⎜⎜⎛XY01⎠⎟⎟⎞=K[r1r2t]⎝⎛XY1⎠⎞
根据单应性,将公式进行整合,可以得到单应矩阵H和相机矩阵(包含内参和外参)的相等: H = λ K [ r 1 r 2 t ] \ H = \lambda K[\begin{array}{c}r_1&r_2&t\end{array}] H=λK[r1r2t]
这样就能通过单应矩阵 H H H来约束相机的内参和外参,单应矩阵 H H H可以通过棋盘平和成像平面上对应的点计算出来。
内参约束条件
通过平面间的单应,可以把H矩阵(3*3)写成3个列向量形式,我们把H矩阵写成: H = [ h 1 h 2 h 3 ] = λ K [ r 1 r 2 t ] \ H =\left[\begin{array}{c}h_1&h_2&h_3\end{array}\right]= \lambda K[\begin{array}{c}r_1&r_2&t\end{array}] H=[h1h2h3]=λK[r1r2t]
r1和r2标准正交,结合上面可以获得两个内参的约束等式:
{ h 1 T K − T K − 1 h 2 = 0 h 1 T K − T K − 1 h 1 = h 2 T K − T K − 1 h 2 = 1 \ \left\{ \begin{array}{l}h_1^TK^{-T}K^{-1}h_2 = 0 \\ h_1^TK^{-T}K^{-1}h_1 = h_2^TK^{-T}K^{-1}h_2 = 1\end{array} \right. {h1TK−TK−1h2=0h1TK−TK−1h1=h2TK−TK−1h2=1
求解内参数
通过一幅标定板的图像可以的得到关于内参数的两个等式,令 B = K − T K − 1 = [ B 11 B 12 B 13 B 21 B 22 B 23 B 31 B 32 B 33 ] = [ 1 α 2 − γ α 2 β v 0 γ − u 0 β α 2 β − γ α 2 β γ 2 α 2 β 2 + 1 β 2 − γ ( v 0 γ − u 0 β ) α 2 β 2 − v 0 β 2 v 0 γ − u 0 β α 2 β − γ ( v 0 γ − u 0 β ) α 2 β 2 − v 0 β 2 ( v 0 γ − u 0 β ) 2 α 2 β 2 + v 0 β 2 + 1 ] \ B=K^{-T}K^{-1}= \left[ \begin{array}{ccc} B_{11} & B_{12} & B_{13} \\ B_{21} & B_{22} & B_{23} \\ B_{31} & B_{32} & B_{33} \end{array} \right]= \left[ \begin{array}{ccc} \frac{1}{\alpha^2} & -\frac{\gamma}{\alpha^2\beta} & \frac{v_0\gamma-u_0\beta}{\alpha^2\beta} \\ -\frac{\gamma}{\alpha^2\beta} & \frac{\gamma^2}{\alpha^2\beta^2}+\frac{1}{\beta^2} & -\frac{\gamma(v_0\gamma-u_0\beta)}{\alpha^2\beta^2}-\frac{v_0}{\beta^2} \\ \frac{v_0\gamma-u_0\beta}{\alpha^2\beta} & -\frac{\gamma(v_0\gamma-u_0\beta)}{\alpha^2\beta^2}-\frac{v_0}{\beta^2} & \frac{(v_0\gamma-u_0\beta)^2}{\alpha^2\beta^2}+\frac{v_0}{\beta^2}+1 \end{array} \right] B=K−TK−1=⎣⎡B11B21B31B12B22B32B13B23B33⎦⎤=⎣⎢⎡α21−α2βγα2βv0γ−u0β−α2βγα2β2γ2+β21−α2β2γ(v0γ−u0β)−β2v0α2βv0γ−u0β−α2β2γ(v0γ−u0β)−β2v0α2β2(v0γ−u0β)2+β2v0+1⎦⎥⎤
可知B矩阵是个对称矩阵,所以可以写成一个6维向量形式 b = [ B 11 , B 12 , B 22 , B 13 , B 23 , B 33 ] \ b =\left[\begin{array}{ccc}B_{11} ,B_{12} , B_{22},B_{13},B_{23},B_{33}\end{array}\right] b=[B11,B12,B22,B13,B23,B33]
我们把 H H H矩阵的列向量形式为: h i = [ h i 1 , h i 2 , h i 3 ] T \ h_i = [h_{i1},h_{i2},h_{i3}]^T hi=[hi1,hi2,hi3]T
整合公式: h i K − T K − 1 h j = h i B h j = v i j T b 其 中 , v i j = [ h i 1 h j 1 h i 1 h j 2 + h i 2 h j 1 h i 2 h j 2 h i 3 h j 1 + h i 1 h j 3 h i 3 h j 2 + h i 2 h j 3 h i 3 h j 3 ] T \ h_iK^{-T}K^{-1}h_j = h_iBh_j = v_{ij}^Tb\\其中,v_{ij}=\left[ \begin{array}{cccccc} h_{i1}h_{j1} & h_{i1}h_{j2}+h_{i2}h_{j1} & h_{i2}h_{j2} & h_{i3}h_{j1}+h_{i1}h_{j3} & h_{i3}h_{j2}+h_{i2}h_{j3} & h_{i3}h_{j3} \end{array} \right]^T hiK−TK−1hj=hiBhj=vijTb其中,vij=[hi1hj1hi1hj2+hi2hj1hi2hj2hi3hj1+hi1hj3hi3hj2+hi2hj3hi3hj3]T
再结合上面求出的内参的约束条件,可得到矩阵: [ v 12 T v 11 − v 22 ] b = 0 \ \left[ \begin{array}{c} v_{12}^T \\ v_{11}-v_{22} \end{array}\right] b = 0 [v12Tv11−v22]b=0
若有n幅图像,则 V b = 0 \ Vb = 0 Vb=0
其中,V是一个2n×6的矩阵,b是一个6维向量,所以:
当 n ≥ 3 n≥3 n≥3,可以得到b的唯一解;
当 n = 2 n=2 n=2,则可以假设扭曲参数γ=0作为额外的约束条件
当 n = 1 n=1 n=1,则值能计算两个相机的内参数
对于方程 V b = 0 Vb=0 Vb=0可以使用SVD求得其最小二乘解。对 V T V V^TV VTV进行SVD分解,其最小特征值对应的特征向量就是 V b = 0 Vb=0 Vb=0的最小二乘解,从而求得矩阵B。
可以得到相机的各个内参数:
{ c x = γ c y / β − B 13 α 2 / λ c y = ( B 12 B 13 − B 11 B 23 ) / ( B 11 B 22 − B 12 2 ) α = λ / B 11 β = λ B 11 / ( B 11 B 22 − B 12 2 ) γ = − B 12 α 2 β / λ λ = B 33 − [ B 13 2 + c y ( B 12 B 13 − B 11 B 23 ) ] / B 11 \ \left\{ \begin{array}{l} c_x = \gamma c_y /\beta - B_{13}\alpha^2 / \lambda \\ c_y = (B_{12}B_{13}-B_{11}B_{23})/(B_{11}B_{22}-B_{12}^2) \\ \alpha = \sqrt{\lambda /B_{11}} \\ \beta = \sqrt{\lambda B_{11}/(B_{11}B_{22}-B_{12}^2)} \\ \gamma = -B_{12}\alpha^2\beta / \lambda \\ \lambda = B_{33}-[B_{13}^2 + c_y(B_{12}B_{13}-B_{11}B_{23})]/B_{11} \end{array} \right. ⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧cx=γcy/β−B13α2/λcy=(B12B13−B11B23)/(B11B22−B122)α=λ/B11β=λB11/(B11B22−B122)γ=−B12α2β/λλ=B33−[B132+cy(B12B13−B11B23)]/B11
最大似然估计
由于上面估计获得的解可能存在高斯噪声,所以使用最大似然估计进行优化。
假设同一相机从 n n n个不同的角度的得到了 n n n幅标定板的图像,每幅图像上有 m m m个像点。 M i j M_{ij} Mij表示第 i i i幅图像上第 j j j个像点对应的标定板上的三维点,则 m ^ ( K , R i , t i , M i j ) = K [ R t ] M i j \ \hat{m}(K,R_i,t_i,M_{ij}) = K[\begin{array}{c}R&t\end{array}]M_{ij} m^(K,Ri,ti,Mij)=K[Rt]Mij
m ^ ( K , R i , t i , M i j ) \hat{m}(K,R_i,t_i,M_{ij}) m^(K,Ri,ti,Mij)表示 M i j M_{ij} Mij的像点。其中, R i , t i R_i,t_i Ri,ti表示第i幅图像对应相机的旋转矩阵和平移向量,K是相机的内参数。则像点 m i j m_{ij} mij的概率密度函数是 f ( m i j ) = 1 2 π e − ( m ^ ( K , R i , t i , M i j ) − m i j ) 2 σ 2 \ f(m_{ij})=\frac{1}{\sqrt{2\pi}}e^{\frac{-(\hat{m}(K,R_i,t_i,M_{ij})-m_{ij})^2}{\sigma^2}} f(mij)=2π1eσ2−(m^(K,Ri,ti,Mij)−mij)2
构造似然函数 L ( A , R i , t i , M i j ) = ∏ i = 1 , j = 1 n , m f ( m i j ) = 1 2 π e − ∑ i = 1 n ∑ j = 1 m ( m ^ ( K , R i , t i , M i j ) − m i j ) 2 σ 2 \ L(A,R_i,t_i,M_{ij}) = \prod^{n,m}_{i=1,j=1}f(m_{ij})=\frac{1}{\sqrt{2\pi}}e^{\frac{-\sum^n_{i=1}\sum^m_{j=1}(\hat{m}(K,R_i,t_i,M_{ij})-m_{ij})^2}{\sigma^2}} L(A,Ri,ti,Mij)=i=1,j=1∏n,mf(mij)=2π1eσ2−∑i=1n∑j=1m(m^(K,Ri,ti,Mij)−mij)2
让L取得最大值,即让下面式子最小 ∑ i = 1 n ∑ j = 1 m ∥ m ^ ( K , R i , t i , M i j ) − m i j ∥ 2 \ \sum^n_{i=1}\sum^m_{j=1} \| \hat{m}(K,R_i,t_i,M_{ij})-m_{ij} \|^2 i=1∑nj=1∑m∥m^(K,Ri,ti,Mij)−mij∥2
消除径向畸变
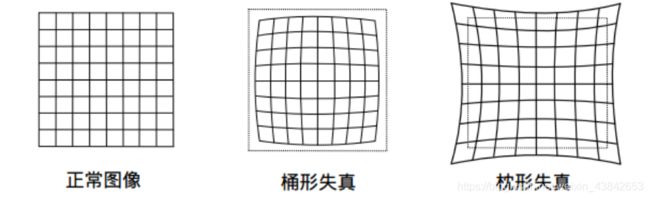
为了取得好的成像效果,通常要在相机的镜头前添加透镜。在相机成像的过程中,透镜会对光线的传播产生影响,从而影响相机的成像效果,产生畸变:
透镜自身的形状对才光线的传播产生影响,形成的畸变称为径向畸变。在小孔模型中,一条指向在成像平面上的像仍然是直线。但是在实际拍摄的过程中,由于透镜的存在,往往将一条直线投影成了曲线,越靠近图像的边缘,这种现象越明显。透镜往往是中心对称的,使得这种不规则的畸变通常是径向对称的。主要有两大类:桶形畸变和枕形畸变。
张氏标定法只关注了影响最大的径向畸变。则数学表达式为: u ^ = u + ( u − u 0 ) [ k 1 ( x 2 + y 2 ) + k 2 ( x 2 + y 2 ) 2 ] v ^ = v + ( v − v 0 ) [ k 1 ( x 2 + y 2 ) + k 2 ( x 2 + y 2 ) 2 ] ¥ \hat u = u + (u-u_0)[k_1(x^2+y^2)+k_2(x^2+y^2)^2] \\ \hat v = v + (v-v_0)[k_1(x^2+y^2)+k_2(x^2+y^2)^2]¥ u^=u+(u−u0)[k1(x2+y2)+k2(x2+y2)2]v^=v+(v−v0)[k1(x2+y2)+k2(x2+y2)2]¥
其中, ( u , v ) (u,v) (u,v)是理想无畸变的像素坐标, ( u ^ , v ^ ) (\hat u, \hat v) (u^,v^)是实际畸变后的像素坐标。 ( u 0 , v 0 ) (u0,v0) (u0,v0)代表主点, ( x , y ) (x,y) (x,y)是理想无畸变的连续图像坐标, ( x ^ , y ^ ) (\hat x, \hat y) (x^,y^)是实际畸变后的连续图像坐标。 k 1 k1 k1和 k 2 k2 k2为前两阶的畸变参数。
u ^ = u 0 + α x ^ + γ y ^ v ^ = v 0 + β y ^ \ \hat u = u_0 + \alpha \hat x + \gamma \hat y \\ \hat v = v_0 + \beta \hat y u^=u0+αx^+γy^v^=v0+βy^
化作矩阵形式: [ ( u − u 0 ) ( x 2 + y 2 ) ( u − u 0 ) ( x 2 + y 2 ) 2 ( v − v 0 ) ( x 2 + y 2 ) ( v − v 0 ) ( x 2 + y 2 ) 2 ] [ k 1 k 2 ] = [ u ^ − u v ^ − v ] \ \left[ \begin{array}{cc} (u-u_0)(x^2+y^2) & (u-u_0)(x^2+y^2)^2 \\ (v-v_0)(x^2+y^2) & (v-v_0)(x^2+y^2)^2 \end{array} \right] \left[ \begin{array}{c} k_1 \\ k_2 \end{array} \right]= \left[ \begin{array}{c} \hat u -u \\ \hat v -v \end{array} \right] [(u−u0)(x2+y2)(v−v0)(x2+y2)(u−u0)(x2+y2)2(v−v0)(x2+y2)2][k1k2]=[u^−uv^−v]
记作: D k = d \ Dk=d Dk=d
则可得畸变系数: k = [ k 1 k 2 ] T = ( D T D ) − 1 D T d \ k=[k_1\ k_2]^T = (D^TD)^{-1}D^Td k=[k1 k2]T=(DTD)−1DTd
使用最大似然的思想优化得到的结果,即像上一步一样,LM法计算下列函数值最小的参数值: ∑ i = 1 n ∑ j = 1 m ∥ m ^ ( K , k 1 , k 2 , R i , t i , M i j ) − m i j ∥ 2 \ \sum^n_{i=1}\sum^m_{j=1} \| \hat{m}(K,k_1,k_2,R_i,t_i,M_{ij})-m_{ij} \|^2 i=1∑nj=1∑m∥m^(K,k1,k2,Ri,ti,Mij)−mij∥2
参考文献:https://blog.csdn.net/u010128736/article/details/52860364
openCV相机标定
实验步骤:
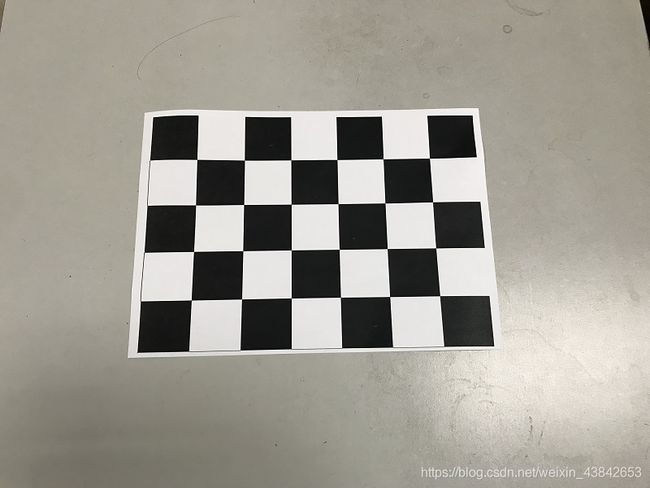
- 先准备一张标定板(棋盘格)我用的是下图:
- 拍摄棋盘格图片,10-20幅左右
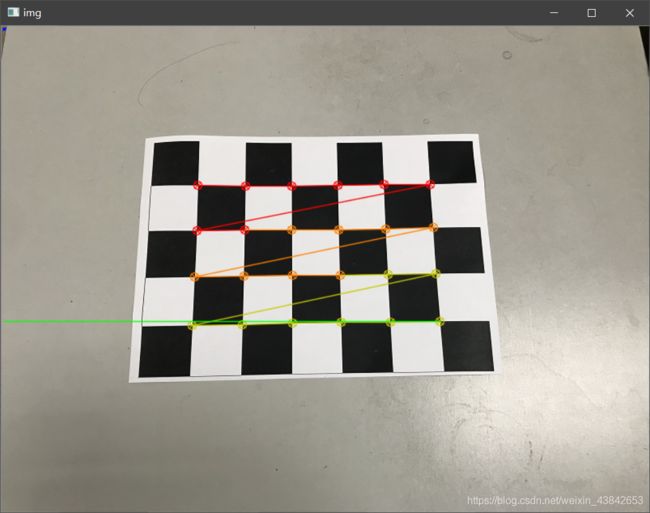
- 读取棋盘格图像,提取图像角点,使用
findChessboardCorners函数提取角点,这里的角点专指的是标定板上的内角点,这些角点与标定板的边缘不接触。 - 为了提高角点提取精度,使用
cornerSubPix函数进行亚像素角点的提取 - 在棋盘标定图上找到的内角点,使用
drawChessboardCorners函数绘制被成功标定的角点。
下图为其中一张角点标定图
- 相机标定,使用
calibrateCamera函数进行标定,计算相机内参和外参系数 - 畸变矫正,用
undistort函数矫正产生的畸变
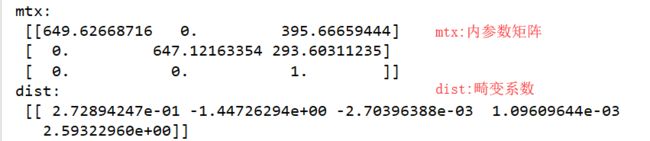
标定结果(iPhone7):

![]()
左图为原图,右图为畸变校正图。
参考文献:https://blog.csdn.net/dcrmg/article/details/52939318
另附代码:
import cv2
import numpy as np
import glob
# 设置寻找亚像素角点的参数,采用的停止准则是最大循环次数30和最大误差容限0.001
criteria = (cv2.TERM_CRITERIA_MAX_ITER | cv2.TERM_CRITERIA_EPS, 30, 0.001)
# 获取标定板角点的位置
objp = np.zeros((6 * 4, 3), np.float32)
objp[:, :2] = np.mgrid[0:6, 0:4].T.reshape(-1, 2) # 将世界坐标系建在标定板上,所有点的Z坐标全部为0,所以只需要赋值x和y
obj_points = [] # 存储3D点
img_points = [] # 存储2D点
images = glob.glob("E:/PycharmProjects/xiangji/*.jpg")
for fname in images:
img = cv2.imread(fname)
cv2.imshow('img',img)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
size = gray.shape[::-1]
ret, corners = cv2.findChessboardCorners(gray, (6, 4), None)
print(ret)
if ret:
obj_points.append(objp)
corners2 = cv2.cornerSubPix(gray, corners, (5, 5), (-1, -1), criteria) # 在原角点的基础上寻找亚像素角点
#print(corners2)
if [corners2]:
img_points.append(corners2)
else:
img_points.append(corners)
cv2.drawChessboardCorners(img, (8, 6), corners, ret) # 记住,OpenCV的绘制函数一般无返回值
cv2.imshow('img', img)
cv2.waitKey(10)
print(len(img_points))
cv2.destroyAllWindows()
# 标定
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(obj_points, img_points, size, None, None)
print("ret:", ret)
print("mtx:\n", mtx) # 内参数矩阵
print("dist:\n", dist) # 畸变系数 distortion cofficients = (k_1,k_2,p_1,p_2,k_3)
print("rvecs:\n", rvecs) # 旋转向量 # 外参数
print("tvecs:\n", tvecs ) # 平移向量 # 外参数
print("-----------------------------------------------------")
img = cv2.imread(images[2])
h, w = img.shape[:2]
newcameramtx, roi = cv2.getOptimalNewCameraMatrix(mtx,dist,(w,h),1,(w,h))#显示更大范围的图片(正常重映射之后会删掉一部分图像)
print (newcameramtx)
dst = cv2.undistort(img,mtx,dist,None,newcameramtx)
x,y,w,h = roi
dst1 = dst[y:y+h,x:x+w]
cv2.imwrite('calibresult3.jpg', dst1)
print ("dst的大小为:", dst1.shape)