PID算法反馈控制系统的剖析
这是一个在PID算法控制下经典的过程方框图

这个图表说明什么了呢?
设定值(SP)是我们想要过程保持的值。
例如,我们室内温度控制系统可能需要设置SP为22度。这就是说“我们想要我们室内加热冷却程序达到一个尽
可能保持在22度的稳定温度。”
PID控制器观测设置值SP,并把SP和过程处理后的变量PV进行比较。回到我们的室内,电子设备盒子,也就是我们加热冷却系统的PID控制器,观测室内温度传感器的数值PV,并将这个值PV和22度SP对比。
如果SP和PV值相等,那么控制器是一个很高兴的小盒子。因为它不必做什么了,只需要将输出值设为0就行了。
但是,如果SP和PV值一个不等,我们会得出一个误差,并且需要进行校正。在我们房间的例子中,这个校正可能
是冷却也可能是加热,这要具体看PV比SP大还是小。
我们假设室内温度PV值比SP大。这代表太热了。那么打开空调,温度下降。
温度传感器感应到温度下降,然后反馈给控制器,然后控制器判断因为PV值下降了这个“温度误差”不是很大,然后把空调调小一点。
这个过程一直重复到温度降到22度,没有误差为止。
然后这个过程中,如果有一个干扰打破这个系统,控制器又得继续工作。
具体到室内,这个干扰可能是指太阳晒到屋顶,导致室内空气温度升高。
以上便是一个简单反馈控制系统的基本概述。听起来很简单,不是吗?
理解控制器
不幸的是,实际生活中,如果我们希望循环中获得好的表现,那么我们需要比我们上面讲的控制器要复杂一点的控制器。
当我们经历这些脑力实验,我们就会领会到为什么需要PID算法,这个算法是怎么控制这个过程的。
我们来类比一个在刮风的高速公路上汽车变道的例子。我们是司机,也就是改变汽车方向的过程控制器。
下面是之前用过的图表框,只不过替换方框内容来说明行驶在起风的高速公路上的汽车的控制循环。
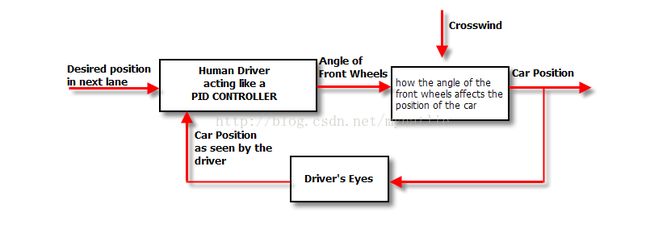
请注意这个图表,反馈的闭环是多么的重要啊。如果我们去掉反馈闭环,我们就是“开环控制”,也就是说我们将闭着眼睛开车了。
感谢我们是处于“闭环控制”,也就是说我们是用眼睛得到的方位反馈。
就像我们在室内温度例子中学到的,控制器需要采用PV和SP两个信号。然后控制器把它们放到黑盒子计算出结果。控制器的输出值发送给一个执行器,由这个执行器执行来实际控制这个过程。
我们这里感兴趣的是这个黑盒子做了什么。黑盒子对SP和测量出来的PV信号做了一到三种计算。这些计算,也叫做“控制模式”包括:
比例(P)
积分(I)
微分(D)。
PID控制器的引擎盖内部
下面便是PID控制器所做的事情的简单方框图: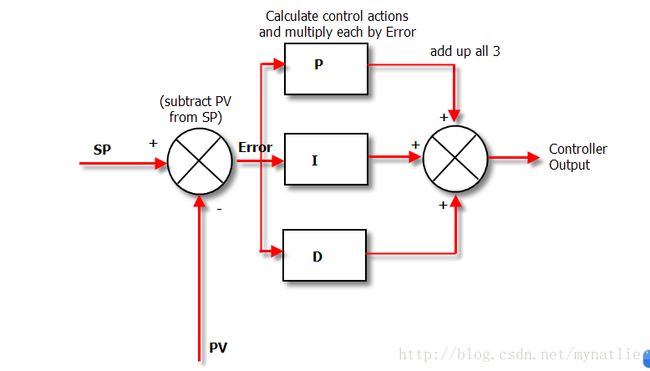
操作很简单。SP减去PV得到误差。然后用误差简单的乘以P、I、D中的一个或几个计算后的数值(具体看哪些动作是打开状态)。然后把乘积的结果相加,送给控制器输出,便是控制器输出值(controller output)了。