目标检测网络(RCNN系列,SSD,Yolo系列)
Table of Contents
深度学习相关的目标检测方法也可以大致分为两派
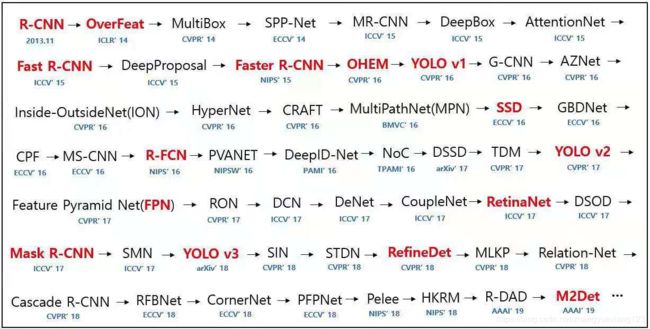
发展历程
基于区域提名的R-CNN家族对比总括
R-CNN(2014)
SPP-Net
Fast R-CNN(2015)
Faster-RCNN
Yolo:you only look once
SSD: Single Shot MultiBox Detector
YoloV2, Yolo9000
FPN
论文概述
论文详解
总结
Mask R-CNN
Yolo V3
总结
SlimYOLO V3
剪枝过程
合理地评估特征通道的重要性方法
深度学习相关的目标检测方法也可以大致分为两派
- 基于区域提名的,如R-CNN, SPP-net, Fast R-CNN, Faster R-CNN, R-FCN;
- 端到端(End-to-End)无需区域提名的,如YOLO, SSD。
发展历程
https://blog.csdn.net/yangshengjie_/article/details/81533580

基于区域提名的R-CNN家族对比总括
R-CNN解决的是,“为什么不用CNN做classification呢?”
Fast R-CNN解决的是,“为什么不一起输出bounding box和label呢?”
Faster R-CNN解决的是,“为什么还要用selective search呢?”
RCNN
1. 在图像中确定约 1000-2000 个候选框 (使用选择性搜索)
2. 每个候选框内图像块缩放至相同大小,并输入到 CNN 内进行特征提取
3. 对候选框中提取出的特征,使用分类器判别是否属于一个特定类
4. 对于属于某一特征的候选框,用回归器进一步调整其位置
Fast-RCNN
1. 在图像中确定约 1000-2000 个候选框 (使用选择性搜索)
2. 对整张图片输进 CNN,得到 feature map
3. 找到每个候选框在 feature map 上的映射 patch,将此 patch 作为每个候选框的卷积特征输入到 SPP layer 和之后的层
4. 对候选框中提取出的特征,使用分类器判别是否属于一个特定类
5. 对于属于某一特征的候选框,用回归器进一步调整其位置
Faster-RCNN
1. 对整张图片输进 CNN,得到 feature map
2. 卷积特征输入到 RPN,得到候选框的特征信息
3. 对候选框中提取出的特征,使用分类器判别是否属于一个特定类
4. 对于属于某一特征的候选框,用回归器进一步调整其位置
R-CNN(2014)
博客:https://blog.csdn.net/yangshengjie_/article/details/81533580
意义:
CNN除了在object classification领域的有一大的应用,证明了CNN的广泛应用性,导致深度学习在成为非常热门的一个研究方向。R-CNN主要是应用在object detection领域,传统的识别是一张图片中有一个物体,而R-CNN是用来识别一个图片中的若干张物体的方法。
算法结构如下:

创新点:
借助CNN良好的特征提取和分类性能,通过Region Proposal方法实现目标检测问题的转化。
实现过程:
目标检测系统由三个模块组成。
(1)第一个模块:区域提取和区域大小归一化
区域提取:通过Selective Search算法对每张图片提取了约2000个自底向上的候选区域。
区域大小归一化:将产生的所有的boxes resize成固定的size(原文采用227×227,作为CNN网络的输入,用来选取特征);
(2)第二个模块:特征提取
利用大型卷积神经网络,负责从每个区域提取固定长度的特征向量。
(3)第三个模块:分类与回归
利用SVM分类器判断whether this is an object, and if so what object,在boxes中找到object之后,通过对所有的region proposals run a simple linear regression to generate tighter bounding box coordinates.
存在的问题:
(1)训练需要多阶段: 先用ConvNet进行微调,再用SVM进行分类,最后通过regression对 bounding box进行微调。
(2)耗时长:每张图片需要运行2k次CNN去寻找特征,selective search (ss)提取候选框耗时较长。
(3)特征提取冗余:每一个候选框依次进入CNN网络,存在冗余提取特征的问题。
(4)时间空间耗费很大:区域提名、特征提取、分类、回归都是断开的训练的过程,中间数据还需要单独保存;卷积出来的特征需要先存在硬盘上,这些特征需要几百G的存储空间;另外,时间消耗很大,GPU上处理一张图片需要13秒,CPU上则需要53秒。
Selective search算法(以下简称ss算法):
首先通过简单的聚类生成区域集合;然后根据定义的相似度不断合并相邻区域构成新的候选框。本质上是一种基于在原始聚类后的区域集合上,依照邻域的相似度,从小到大的进行滑动窗口。具体算法实现如下:
算法实现步骤:
step1:计算区域集R里每个相邻区域的相似度S={s1,s2,…}
step2:找出相似度最高的两个区域,将其合并为新集,添加进R
step3:从S中移除所有与step2中有关的子集
step4:计算新集与所有子集的相似度
step5:跳至step2,直至S为空
- 相似度度量标准:
颜色相似度、纹理相似度、尺寸相似度以及交叠相似度。selective search具体计算方式参考:https://blog.csdn.net/guoyunfei20/article/details/78723646
SPP-Net
博客:https://blog.csdn.net/sum_nap/article/details/80388110
论文:https://arxiv.org/abs/1406.4729
创新点:
在R-CNN的基础上做出改进,将Region Proposal的位置信息放在卷积层之后,这样使得图像可以在一次计算的基础上整体提取特征,减少RCNN带来的最大问题——冗余计算和冗余存储。
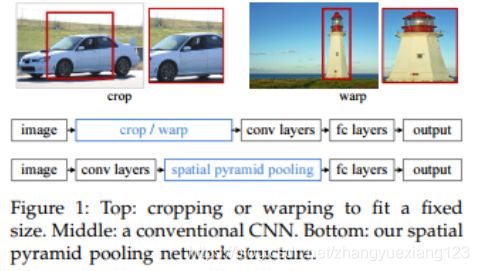
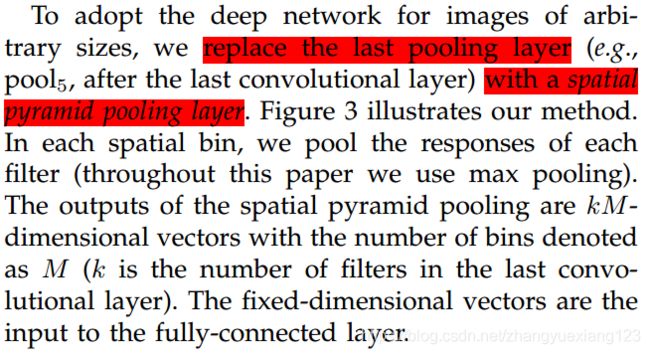
SPP允许输入图像大小任意,网络结构如下:
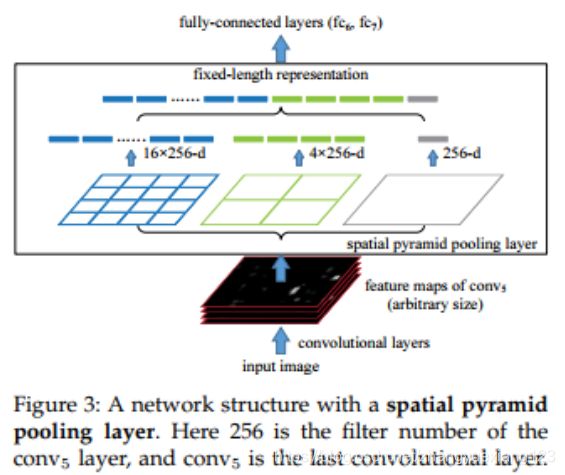
为了使输入图像任意大小,网络修改如下:
Fast R-CNN(2015)
论文:https://arxiv.org/abs/1504.08083
R-CNN按照上面的三个标准步骤依次进行,selective search for region proposals,cnn for features,svm for classification。
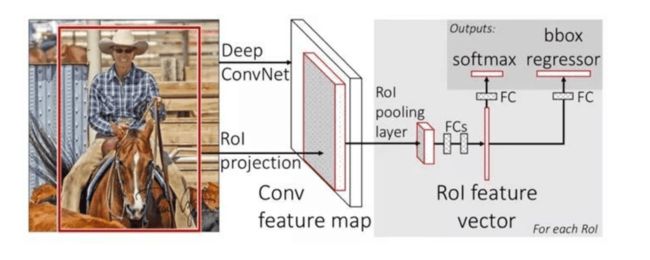
Fast-R-CNN将后两个步骤合并,cnn对region proposal生成feature map,接着通过ROI(region of interest)层将feature map转换成fc layer,然后对fc layer进行softmax classification以及bounding box regression的多任务训练。
创新点:
(1)提出ROI pooling池化层结构(ROI pooling解析见下面),解决了候选框子图必须将图像裁剪缩放到相同尺寸大小的问题。由于CNN网络的输入图像尺寸必须是固定的某一个大小(否则全连接时没法计算),故R-CNN中对大小形状不同的候选框,进行了裁剪和缩放,使得他们达到相同的尺寸。这个操作既浪费时间,又容易导致图像信息丢失和形变。fast R-CNN在全连接层之前插入了ROI pooling层,从而不需要对图像进行裁剪,很好的解决了这个问题。
如下图,剪切会导致信息丢失,缩放会导致图像形变。

ROI pooling的思路是,如果最终我们要生成MxN的图片,那么先将特征图水平和竖直分为M和N份,然后每一份取最大值,输出MxN的特征图。这样就实现了固定尺寸的图片输出了。即针对每个推荐区域,ROI池化层从每个特征映射中提取固定大小的特征向量。ROI pooling层位于卷积后,全连接前。
(2)提出多任务损失函数思想,将分类损失和边框定位回归损失结合在一起统一训练,最终输出对应分类和边框坐标。
Fast R-CNN的结构如如下:
存在问题:
提取候选框依然十分耗时,这个过程十分耗时,制约fast-RCNN的速度瓶颈。
ROI pooling具体操作:
博客:https://blog.csdn.net/auto1993/article/details/78514071
(1)根据输入image,将ROI映射到feature map对应位置;
(2)将映射后的区域划分为相同大小的sections(sections数量与输出的维度相同);
(3)对每个sections进行max pooling操作;
这样我们就可以从不同大小的方框得到固定大小的相应 的feature maps。值得一提的是,输出的feature maps的大小不取决于ROI和卷积feature maps大小。ROI pooling 最大的好处就在于极大地提高了处理速度。
ROI pooling example
考虑一个8*8大小的feature map,一个ROI,以及输出大小为2*2.
(1)输入的固定大小的feature map

(2)region proposal 投影之后位置(左上角,右下角坐标):(0,3),(7,8)。
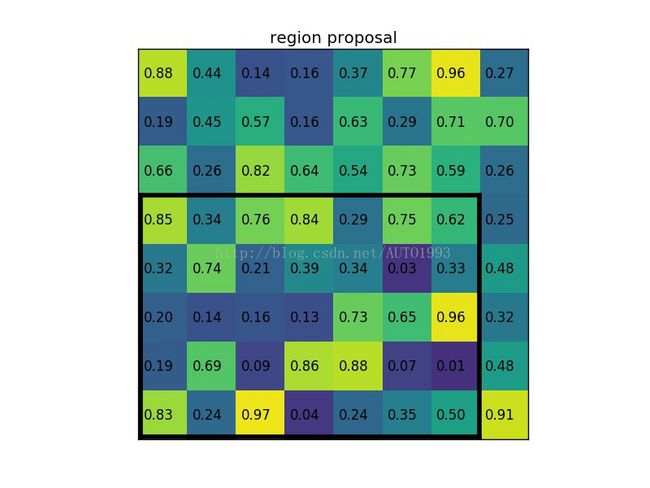
(3)将其划分为(2*2)个sections(因为输出大小为2*2),我们可以得到:
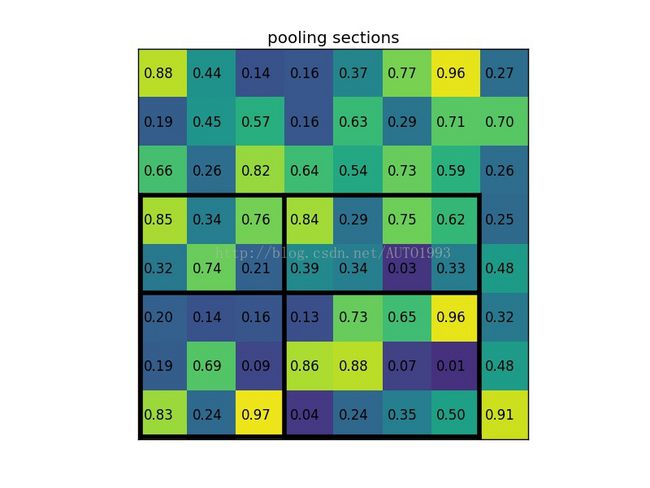
(4)对每个section做max pooling,可以得到:

ROI pooling总结:
(1)用于目标检测任务;(2)允许我们对CNN中的feature map进行reuse;(3)可以显著加速training和testing速度;(4)允许end-to-end的形式训练目标检测系统。
Faster-RCNN
Faster-R-CNN将三个步骤合并,region proposal、classification、regression三者共享一个based cnn network。
R-CNN和fast R-CNN均存在一个问题,那就是由选择性搜索来生成候选框,这个算法很慢。faster R-CNN 针对这个问题,提出了RPN网络来进行候选框的获取,从而摆脱了选择性搜索算法,也只需要一次卷积层操作,从而大大提高了识别速度。
博客:https://blog.csdn.net/u013510838/article/details/79947553
创新点:
候选框提取不一定非要在原图上做,可以考虑在特征图上做。继而提出了RPN(RegionProposal Network),使得其可以抛弃传统的Region proposal的方法,大幅加快训练速度。
Faster R-CNN模型由两个模块组成:
(1)第一个模块:负责提出区域的深度卷积网络。
(2)第二个模块:使用上述提取区域的Fast R-CNN探测器。
候选区域网络(Region Proposal Network)以图像为输入,生成矩形目标候选的输出。每个矩形都有一个objectness score。

ROI分为四个步骤:
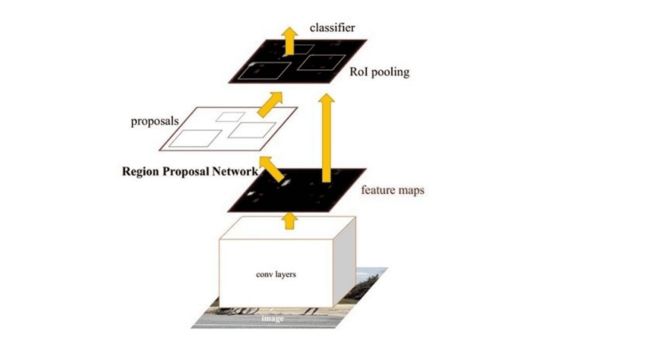
(1)卷积层。原始图片先经过conv-relu-pooling的多层卷积神经网络,提取出特征图。供后续的RPN网络和全连接层使用。faster R-CNN不像R-CNN需要对每个子图进行卷积层特征提取,它只需要对全图进行一次提取就可以了,从而大大减小了计算时间。
(2)RPN层,region proposal networks。RPN层用于生成候选框,并利用softmax判断候选框是前景还是背景,从中选取前景候选框(因为物体一般在前景中),并利用bounding box regression调整候选框的位置,从而得到特征子图,称为proposals。
(3)ROI层,fast R-CNN中已经讲过了ROI层了,它将大小尺寸不同的proposal池化成相同的大小,然后送入后续的全连接层进行物体分类和位置调整回归.
(4)分类层。利用ROI层输出的特征图proposal,判断proposal的类别,同时再次对bounding box进行regression从而得到精确的形状和位置。
使用VGG-16卷积模型的具体网络结构如下图:
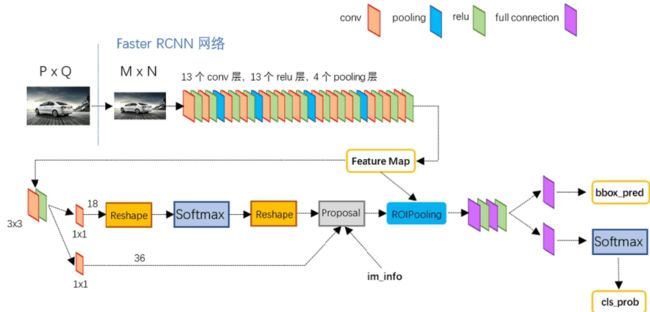
4.1 卷积层
卷积层采用的VGG-16模型,先将PxQ的原始图片,缩放裁剪为MxN的图片,然后经过13个conv-relu层,其中会穿插4个max-pooling层。所有的卷积的kernel都是3x3的,padding为1,stride为1。pooling层kernel为2x2, padding为0,stride为2。
MxN的图片,经过卷积层后,变为了(M/16) x (N/16)的feature map了。
4.2 RPN层
faster R-CNN抛弃了R-CNN中的选择性搜索(selective search)方法,使用RPN层来生成候选框,能极大的提升候选框的生成速度。RPN层先经过3x3的卷积运算,然后分为两路。一路用来判断候选框是前景还是背景,它先reshape成一维向量,然后softmax来判断是前景还是背景,然后reshape恢复为二维feature map。另一路用来确定候选框的位置,通过bounding box regression实现,后面再详细讲。两路计算结束后,挑选出前景候选框(因为物体在前景中),并利用计算得到的候选框位置,得到我们感兴趣的特征子图proposal。
4.2.1 候选框的生成 anchors
卷积层提取原始图像信息,得到了256个feature map,经过RPN层的3x3卷积后,仍然为256个feature map。但是每个点融合了周围3x3的空间信息。对每个feature map上的一个点,生成k个anchor(k默认为9)。anchor分为前景和背景两类(我们先不去管它具体是飞机还是汽车,只用区分它是前景还是背景即可)。anchor有[x,y,w,h]四个坐标偏移量,x,y表示中心点坐标,w和h表示宽度和高度。这样,对于feature map上的每个点,就得到了k个大小形状各不相同的选区region。
4.2.2 softmax判断选区是前景还是背景
对于生成的anchors,我们首先要判断它是前景还是背景。由于感兴趣的物体位于前景中,故经过这一步之后,我们就可以舍弃背景anchors了。大部分的anchors都是属于背景,故这一步可以筛选掉很多无用的anchor,从而减少全连接层的计算量。
对于经过了3x3的卷积后得到的256个feature map,先经过1x1的卷积,变换为18个feature map。然后reshape为一维向量,经过softmax判断是前景还是背景。此处reshape的唯一作用就是让数据可以进行softmax计算。然后输出识别得到的前景anchors。
4.2.3 确定候选框位置
另一路用来确定候选框的位置,也就是anchors的[x,y,w,h]坐标值。如下图所示,红色代表我们当前的选区,绿色代表真实的选区。虽然我们当前的选取能够大概框选出飞机,但离绿色的真实位置和形状还是有很大差别,故需要对生成的anchors进行调整。这个过程我们称为bounding box regression。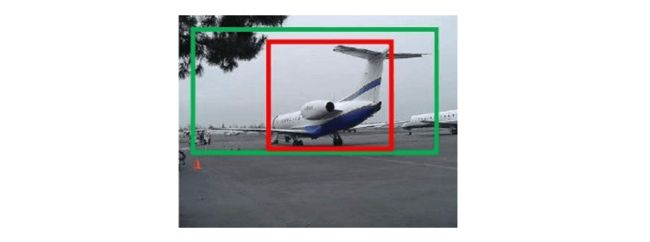
假设红色框的坐标为[x,y,w,h], 绿色框即目标框的坐标为[Gx, Gy,Gw,Gh], 我们要建立一个变换,使得[x,y,w,h]能够变为[Gx, Gy,Gw,Gh]。最简单的思路是,先做平移,使得中心点接近,然后进行缩放,使得w和h接近。如下:

我们要学习的就是dx dy dw dh这四个变换。由于是线性变换,我们可以用线性回归来建模。设定loss和优化方法后,就可以利用深度学习进行训练,并得到模型了。对于空间位置loss,我们一般采用均方差算法,而不是交叉熵(交叉熵使用在分类预测中)。优化方法可以采用自适应梯度下降算法Adam。
4.2.4 输出特征子图proposal
得到了前景anchors,并确定了他们的位置和形状后,我们就可以输出前景的特征子图proposal了。步骤如下:
(1)得到前景anchors和他们的[x y w h]坐标。
(2)按照anchors为前景的不同概率,从大到小排序,选取前pre_nms_topN个anchors,比如前6000个。
(3)剔除非常小的anchors。
(4)通过NMS非极大值抑制,从anchors中找出置信度较高的。这个主要是为了解决选取交叠问题。首先计算每一个选区面积,然后根据他们在softmax中的score(也就是是否为前景的概率)进行排序,将score最大的选区放入队列中。接下来,计算其余选区与当前最大score选区的IOU(IOU为两box交集面积除以两box并集面积,它衡量了两个box之间重叠程度)。去除IOU大于设定阈值的选区。这样就解决了选区重叠问题。
(5)选取前post_nms_topN个结果作为最终选区proposal进行输出,比如300个。
经过这一步之后,物体定位应该就基本结束了,剩下的就是物体识别了
4.3 ROI Pooling层
和fast R-CNN中类似,这一层主要解决之前得到的proposal大小形状各不相同,导致没法做全连接。全连接计算只能对确定的shape进行运算,故必须使proposal大小形状变为相同。通过裁剪和缩放的手段,可以解决这个问题,但会带来信息丢失和图片形变问题。我们使用ROI pooling可以有效的解决这个问题。
ROI pooling中,如果目标输出为MxN,则在水平和竖直方向上,将输入proposal划分为MxN份,每一份取最大值,从而得到MxN的输出特征图。
4.4 分类层
ROI Pooling层后的特征图,通过全连接层与softmax,就可以计算属于哪个具体类别,比如人,狗,飞机,并可以得到cls_prob概率向量。同时再次利用bounding box regression精细调整proposal位置,得到bbox_pred,用于回归更加精确的目标检测框。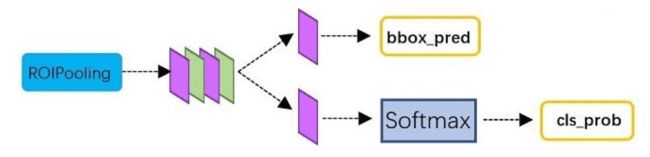
这样就完成了faster R-CNN的整个过程了。算法还是相当复杂的,对于每个细节需要反复理解。faster R-CNN使用resNet101模型作为卷积层,在voc2012数据集上可以达到83.8%的准确率,超过yolo ssd和yoloV2。其最大的问题是速度偏慢,每秒只能处理5帧,达不到实时性要求。
Yolo:you only look once
论文:https://arxiv.org/pdf/1506.02640.pdf
优点:
针对于two-stage目标检测算法普遍存在的运算速度慢的缺点,yolo创造性的提出了one-stage。也就是将物体分类和物体定位在一个步骤中完成。yolo直接在输出层回归bounding box的位置和bounding box所属类别,从而实现one-stage。通过这种方式,yolo可实现45帧每秒的运算速度,完全能满足实时性要求(达到24帧每秒,人眼就认为是连续的)。
缺点:
速度极大的得到提升,但是检测精度跟faster-RCNN相比,降低了不少。不再显式提取候选框。
步骤:
主要分为三个部分:卷积层,目标检测层,NMS筛选层。
5.1 卷积层
采用Google inceptionV1网络,对应到上图中的第一个阶段,共20层。这一层主要是进行特征提取,从而提高模型泛化能力。但作者对inceptionV1进行了改造,他没有使用inception module结构,而是用一个1x1的卷积,并联一个3x3的卷积来替代。(可以认为只使用了inception module中的一个分支,应该是为了简化网络结构)
5.2 目标检测层
先经过4个卷积层和2个全连接层,最后生成7x7x30的输出。先经过4个卷积层的目的是为了提高模型泛化能力。yolo将一副448x448的原图分割成了7x7个网格,每个网格要预测两个bounding box的坐标(x,y,w,h)和box内包含物体的置信度confidence,以及物体属于20类别中每一类的概率(yolo的训练数据为voc2012,它是一个20分类的数据集)。所以一个网格对应的参数为(4x2+2+20) = 30。如下图:
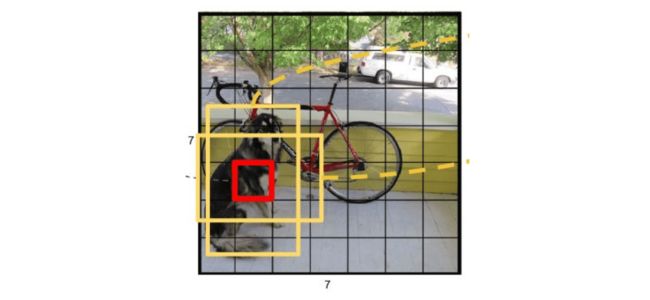
(1)bounding box坐标: 如上图,7x7网格内的每个grid(红色框),对应两个大小形状不同的bounding box(黄色框)。每个box的位置坐标为(x,y,w,h), x和y表示box中心点坐标,w和h表示box宽度和高度。通过与训练数据集上标定的物体真实坐标(Gx,Gy,Gw,Gh)进行对比训练,可以计算出初始bounding box平移和伸缩得到最终位置的模型。
(2)bounding box置信度confidence:这个置信度只是为了表达box内有无物体的概率,并不表达box内物体是什么。
confidence=
其中前一项表示有无人工标记的物体落入了网格内,如果有则为1,否则为0。第二项代表bounding box和真实标记的box之间的重合度。它等于两个box面积交集,除以面积并集。值越大则box越接近真实位置。
(3)分类信息:yolo的目标训练集为voc2012,它是一个20分类的目标检测数据集。常用目标检测数据集如下表

每个网格还需要预测它属于20分类中每一个类别的概率。分类信息是针对每个网格的,而不是bounding box。故只需要20个,而不是40个。而confidence则是针对bounding box的,它只表示box内是否有物体,而不需要预测物体是20分类中的哪一个,故只需要2个参数。虽然分类信息和confidence都是概率,但表达含义完全不同。
5.3 NMS筛选层
筛选层是为了在多个结果中(多个bounding box)筛选出最合适的几个,这个方法和faster R-CNN 中基本相同。都是先过滤掉score低于阈值的box,对剩下的box进行NMS非极大值抑制,去除掉重叠度比较高的box(NMS具体算法可以回顾上面faster R-CNN小节)。这样就得到了最终的最合适的几个box和他们的类别。
5.4 yolo损失函数
yolo的损失函数包含三部分,位置误差,confidence误差,分类误差。具体公式如下:
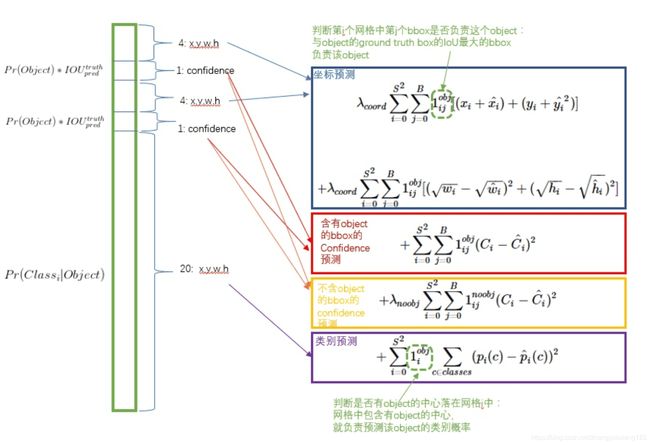
继续解释损失函数:
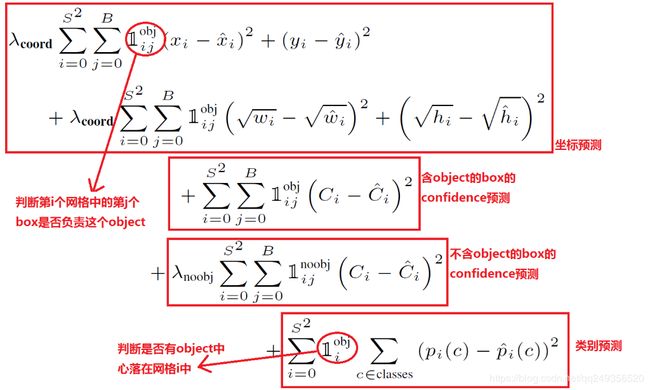
误差均采用了均方差算法,其实我认为,位置误差应该采用均方差算法,而分类误差应该采用交叉熵。由于物体位置只有4个参数,而类别有20个参数,他们的累加和不同。如果赋予相同的权重,显然不合理。故yolo中位置误差权重为5,类别误差权重为1。由于我们不是特别关心不包含物体的bounding box,故赋予不包含物体的box的置信度confidence误差的权重为0.5,包含物体的权重则为1。
yolo算法开创了one-stage检测的先河,它将物体分类和物体检测网络合二为一,都在全连接层完成。故它大大降低了目标检测的耗时,提高了实时性。
但它的缺点也十分明显:
(1)每个网格只对应两个bounding box,当物体的长宽比不常见(也就是训练数据集覆盖不到时),效果很差。
(2)原始图片只划分为7x7的网格,当两个物体靠的很近时,效果很差
(3)最终每个网格只对应一个类别,容易出现漏检(物体没有被识别到)。
(4)对于图片中比较小的物体,效果很差。这其实是所有目标检测算法的通病,SSD对它有些优化,我们后面再看。
SSD: Single Shot MultiBox Detector
论文链接:https://arxiv.org/abs/1512.02325
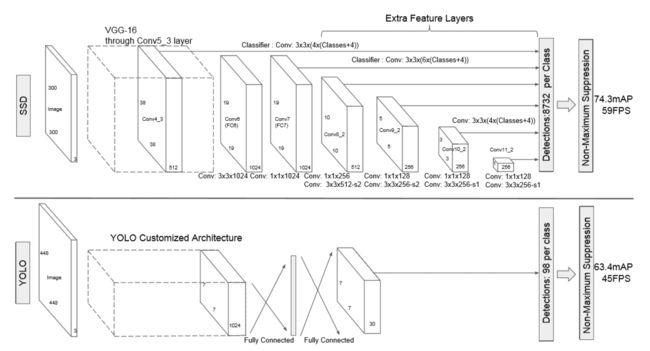
Faster R-CNN准确率mAP较高,漏检率recall较低,但速度较慢。而yolo则相反,速度快,但准确率和漏检率不尽人意。SSD综合了他们的优缺点,对输入300x300的图像,在voc2007数据集上test,能够达到58 帧每秒( Titan X 的 GPU ),72.1%的mAP。
SSD网络结构如下图:
步骤:
和yolo一样,也分为三部分:卷积层,目标检测层和NMS筛选层。
SSD网络结构从图中可以看出来分为两部分 基础网络 + 金字塔网络。基础网络是VGG-16的前4层网络。金字塔网络是特征图逐渐变小的简单卷积网络由5部分构成。
(1)多尺寸feature map上进行目标检测
就是特征金字塔检测方式。从不同尺度的特征图下面来预测目标分类与位置。
可以克服yolo对于宽高比不常见的物体,识别准确率较低的问题。
而yolo中,只在最后一个卷积层上做目标位置和类别的训练和预测。这是SSD相对于yolo能提高准确率的一个关键所在。
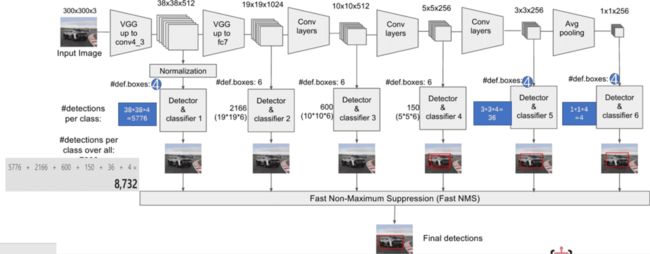
如上所示,在每个卷积层上都会进行目标检测和分类,最后由NMS进行筛选,输出最终的结果。多尺度feature map上做目标检测,就相当于多了很多宽高比例的bounding box,可以大大提高泛化能力。
(2)多个anchors,每个anchor对应4个位置参数和21个类别参数
和faster R-CNN相似,SSD也提出了anchor的概念。
卷积输出的feature map,每个点对应为原图的一个区域的中心点。以这个点为中心,构造出6个宽高比例不同,大小不同的anchor(SSD中称为default box)。每个anchor对应4个位置参数(x,y,w,h)和21个类别概率(voc训练集为20分类问题,在加上anchor是否为背景,共21分类)。如下图所示
(3)筛选层
和yolo的筛选层基本一致,同样先过滤掉类别概率低于阈值的default box,再采用NMS非极大值抑制,筛掉重叠度较高的。只不过SSD综合了各个不同feature map上的目标检测输出的default box。
SSD基本已经可以满足我们手机端上实时物体检测需求了,TensorFlow在Android上的目标检测官方模型ssd_mobilenet_v1_android_export.pb,就是通过SSD算法实现的。它的基础卷积网络采用的是mobileNet,适合在终端上部署和运行。
YoloV2, Yolo9000
两者联系:
yoloV2只能识别20类物体,为了优化这个问题,提出了yolo9000,可以识别9000类物体。它在yoloV2基础上,进行了imageNet和coco的联合训练。这种方式充分利用imageNet可以识别1000类物体和coco可以进行目标位置检测的优点。当使用imageNet训练时,只更新物体分类相关的参数。而使用coco时,则更新全部所有参数。
相对于Yolo V1改进:
博客:https://blog.csdn.net/sum_nap/article/details/80453396
(1)Batch Normalization:引入了BN(batch normalization)算法,加速训练,同时使MAP增加了2%。
- 关于BN的实现、作用及思想:参考链接:https://www.zhihu.com/question/38102762
- 关于BN算法,这个讲解的挺好:https://www.cnblogs.com/stingsl/p/6428694.html
- 额外链接:白化算法:https://blog.csdn.net/whiteinblue/article/details/36171233
(2)High resolution classifier:采用高分辨率的图片输入对分类网络进行fine-tune(即用448x448的输入分辨率在ImageNet上进行参数微调),从而适用于高分辨率的(fifilters)的输入;
(3)Convolution with anchor boxes:把全连接层取消,使用anchor boxes来预测目标方框。
yolo中以全连接层预测bounding box的坐标,因为是全连接层,所以能够直接预测坐标值(个人理解:全连接层保证每一个输出节点跟任何一个像素点都有关系,类似于感受野)。
faster-RCNN通过卷积核的方式预测相对偏移而不是直接坐标,作者通过发现,预测相对偏执相对于预测直接来说更加容易(make it easier for the network to learn.)。
yolo v2将yolo最后的全连接层去掉,换成类似于faster-RCNN的卷积层,并且使用anchor box的方式对boundin box的相对位置进行预测,作者去掉了网络中一个Pooling层,这让卷积层的输出能有更高的分辨率。收缩网络让其运行在416*416而不是448*448。由于图片中的物体都倾向于出现在图片的中心位置,特别是那种比较大的物体,所以有一个单独位于物体中心的位置用于预测这些物体。
(4)Dimension clusters:通过k-means聚类选择合适的anchor box,更加体现了(faster-RCNN中的)anchor box在选择时的经验性。通过聚类算法,找出最能代表物体shape的不同比例或尺度的anchor box。并且通过实验表明聚类算法是有效果的。
FPN
博客:https://blog.csdn.net/qq_29462849/article/details/80844845
论文概述
作者提出的多尺度的object detection算法:FPN(feature pyramid networks)。原来多数的object detection算法都是只采用顶层特征做预测,但我们知道低层的特征语义信息比较少,但是目标位置准确;高层的特征语义信息比较丰富,但是目标位置比较粗略。另外虽然也有些算法采用多尺度特征融合的方式,但是一般是采用融合后的特征做预测,而本文不一样的地方在于预测是在不同特征层独立进行的。
论文详解
下图FIg1展示了4种利用特征的形式:
(a)图像金字塔,即将图像做成不同的scale,然后不同scale的图像生成对应的不同scale的特征。这种方法的缺点在于增加了时间成本。有些算法会在测试时候采用图像金字塔。
(b)像SPP net,Fast RCNN,Faster RCNN是采用这种方式,即仅采用网络最后一层的特征。
(c)像SSD(Single Shot Detector)采用这种多尺度特征融合的方式,没有上采样过程,即从网络不同层抽取不同尺度的特征做预测,这种方式不会增加额外的计算量。作者认为SSD算法中没有用到足够低层的特征(在SSD中,最低层的特征是VGG网络的conv4_3),而在作者看来足够低层的特征对于检测小物体是很有帮助的。
(d)本文作者是采用这种方式,顶层特征通过上采样和低层特征做融合,而且每层都是独立预测的。

如下图Fig2。上面一个带有skip connection的网络结构在预测的时候是在finest level(自顶向下的最后一层)进行的,简单讲就是经过多次上采样并融合特征到最后一步,拿最后一步生成的特征做预测。而下面一个网络结构和上面的类似,区别在于预测是在每一层中独立进行的。后面有这两种结构的实验结果对比,非常有意思,因为之前只见过使用第一种特征融合的方式。

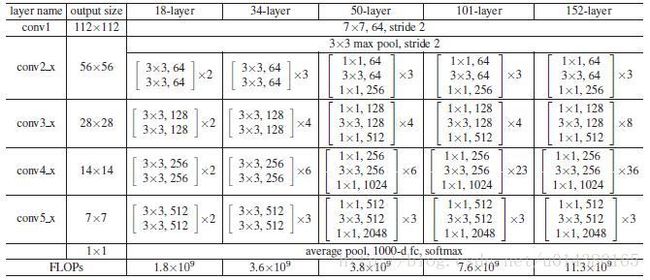
作者的主网络采用ResNet。
作者的算法大致结构如下Fig3:一个自底向上的线路,一个自顶向下的线路,横向连接(lateral connection)。图中放大的区域就是横向连接,这里1*1的卷积核的主要作用是减少卷积核的个数,也就是减少了feature map的个数,并不改变feature map的尺寸大小。

自底向上其实就是网络的前向过程。在前向过程中,feature map的大小在经过某些层后会改变,而在经过其他一些层的时候不会改变,作者将不改变feature map大小的层归为一个stage,因此每次抽取的特征都是每个stage的最后一个层输出,这样就能构成特征金字塔。
自顶向下的过程采用上采样(upsampling)进行,而横向连接则是将上采样的结果和自底向上生成的相同大小的feature map进行融合(merge)。在融合之后还会再采用3*3的卷积核对每个融合结果进行卷积,目的是消除上采样的混叠效应(aliasing effect)。并假设生成的feature map结果是P2,P3,P4,P5,和原来自底向上的卷积结果C2,C3,C4,C5一一对应。
贴一个ResNet的结构图:这里作者采用Conv2,CONV3,CONV4和CONV5的输出。因此类似Conv2就可以看做一个stage。
作者一方面将FPN放在RPN网络中用于生成proposal,原来的RPN网络是以主网络的某个卷积层输出的feature map作为输入,简单讲就是只用这一个尺度的feature map。但是现在要将FPN嵌在RPN网络中,生成不同尺度特征并融合作为RPN网络的输入。在每一个scale层,都定义了不同大小的anchor,对于P2,P3,P4,P5,P6这些层,定义anchor的大小为32^2,64^2,128^2,256^2,512^2,另外每个scale层都有3个长宽对比度:1:2,1:1,2:1。所以整个特征金字塔有15种anchor。
正负样本的界定和Faster RCNN差不多:如果某个anchor和一个给定的ground truth有最高的IOU或者和任意一个Ground truth的IOU都大于0.7,则是正样本。如果一个anchor和任意一个ground truth的IOU都小于0.3,则为负样本。
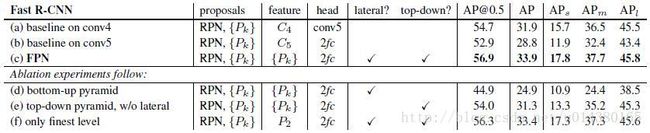
看看加入FPN的RPN网络的有效性,如下表Table1。网络这些结果都是基于ResNet-50。评价标准采用AR,AR表示Average Recall,AR右上角的100表示每张图像有100个anchor,AR的右下角s,m,l表示COCO数据集中object的大小分别是小,中,大。feature列的大括号{}表示每层独立预测。

从(a)(b)(c)的对比可以看出FRN的作用确实很明显。另外(a)和(b)的对比可以看出高层特征并非比低一层的特征有效。
(d)表示只有横向连接,而没有自顶向下的过程,也就是仅仅对自底向上(bottom-up)的每一层结果做一个1*1的横向连接和3*3的卷积得到最终的结果,有点像Fig1的(b)。从feature列可以看出预测还是分层独立的。作者推测(d)的结果并不好的原因在于在自底向上的不同层之间的semantic gaps比较大。
(e)表示有自顶向下的过程,但是没有横向连接,即向下过程没有融合原来的特征。这样效果也不好的原因在于目标的location特征在经过多次降采样和上采样过程后变得更加不准确。
(f)采用finest level层做预测(参考Fig2的上面那个结构),即经过多次特征上采样和融合到最后一步生成的特征用于预测,主要是证明金字塔分层独立预测的表达能力。显然finest level的效果不如FPN好,原因在于PRN网络是一个窗口大小固定的滑动窗口检测器,因此在金字塔的不同层滑动可以增加其对尺度变化的鲁棒性。另外(f)有更多的anchor,说明增加anchor的数量并不能有效提高准确率。
另一方面将FPN用于Fast R-CNN的检测部分。除了(a)以外,分类层和卷积层之前添加了2个1024维的全连接层。细节地方可以等代码出来后再研究。
实验结果如下表Table2,这里是测试Fast R-CNN的检测效果,所以proposal是固定的(采用Table1(c)的做法)。与Table1的比较类似,(a)(b)(c)的对比证明在基于区域的目标卷积问题中,特征金字塔比单尺度特征更有效。(c)(f)的差距很小,作者认为原因是ROI pooling对于region的尺度并不敏感。因此并不能一概认为(f)这种特征融合的方式不好,博主个人认为要针对具体问题来看待,像上面在RPN网络中,可能(f)这种方式不大好,但是在Fast RCNN中就没那么明显。
同理,将FPN用于Faster RCNN的实验结果如下表Table3。

下表Table4是和近几年在COCO比赛上排名靠前的算法的对比。注意到本文算法在小物体检测上的提升是比较明显的。

另外作者强调这些实验并没有采用其他的提升方法(比如增加数据集,迭代回归,hard negative mining),因此能达到这样的结果实属不易。
总结
作者提出的FPN(Feature Pyramid Network)算法同时利用低层特征高分辨率和高层特征的高语义信息,通过融合这些不同层的特征达到预测的效果。并且预测是在每个融合后的特征层上单独进行的,这和常规的特征融合方式不同。
Mask R-CNN
博客:https://blog.csdn.net/WZZ18191171661/article/details/79453780
Yolo V3
改进:
(1)bouning box prediction:
在训练的时候使用均方误差损失和(sum of squared error loss);
对于检测框是否有物体采用logistic regression预测一个(object score),即对先验与实际方框IOU大于0.5的作为正例,与SSD不同的是,若有多个先验满足目标,只取一个IOU最大的先验。
(2)class prediction:
作者在训练时对于不同的类别使用独立的logistc classifiers,而不再采用softmax的方式生成类别预测向量,原因系(We have found it is unnecessary for good performance)。
使用二元交叉熵作为分类损失。
另一方面是因为在当存在类别重叠的时候,softmax无法适用。
(3)prediction across scales:
利用多个scale进行预测,实际使用3个不同的scale。将前两层的feature-map进行上采样,与开始的feature-map进行concat起来,加一些卷积层,然后进行预测。
(4)feature extractor:
新的特征提取网络Darkent-53:(Darknet-53和Resnet-152正确率相同,但速度是2倍。)

总结
博客:https://blog.csdn.net/u013510838/article/details/79947553
目标检测领域主要的难点如下:
(1)检测速度:实时性要求高,故网络结构不能太复杂,参数不能太多,卷积层次也不能太多。
(2)位置准确率:(x y w h)参数必须准确,也就是检测框大小尺寸要匹配,且重合度IOU要高。SSD和faster RCNN通过多个bounding box来优化这个问题。
(3)漏检率:必须尽量检测出所有目标物体,特别是靠的近的物体和尺寸小的物体。SSD和faster RCNN通过多个bounding box来优化这个问题。
(4)物体宽高比例不常见:SSD通过不同尺寸feature map,yoloV2通过不同尺寸输入图片,来优化这个问题。
(5)靠的近的物体准确率低。
(6)小尺寸物体准确率低:SSD取消全连接层,yoloV2增加pass through layer,采用高分辨率输入图片,来优化这个问题。
SlimYOLO V3
剪枝过程
什么是深度模型的剪枝?就像论文名字中的更窄(Narrower),它是要减少模型通道数。
去除每个卷积层中不重要的特征通道。所以需要合理地评估特征通道的重要性。
下图可以较为明了地说明整个过程。

合理地评估特征通道的重要性方法
http://objectdetection.cn/
移除的组件可以是单独的神经连接或网络结构。为了定义每个组件的重要性,我们根据它们的贡献对网络的每个神经元进行排序。有多种方法可以做到:
– 我们可以采用L1 / L2正则化神经元权重的平均值
– 每个神经元的平均激活
– 神经元输出不为零的次数