FPGA 图像加速处理之 canny 算法——C语言实现
本文偏重于算法原理的理解及C语言编程实现,最终输出的图像完全与OpenCV处理的一模一样,更详细的原理简介,可以参考网上其他文章
一 canny 原理简介
canny 算法是迄今为止最为优秀的边缘检查算法,它主要基于三个目标:
1、低错误率。所谓的低错误率就是所有的边缘都应该被找到,并且没有伪边缘。也就是检查到的边缘必须尽可能是真实的边缘。
2、边缘点应被很好第定位。也就是检查到的边缘点,必须尽可能的定位准确。应该更逼近真实边缘的中心。
3、单一的边缘点响应。也就是标记出来的边缘必须窄(单点连接而成)。不应该过宽。
要实现上面三个目标,可以使用一下方式来实现:
1、使用滞后阀值(双阀值)来处理,可以达到低错误率的要求。
2、使用非极大值抑制,可以实现边缘的单一响应及很好的定位。
所以 canny 算法使用了一下步骤:
二 canny 实现步骤
1、高斯滤波,一般用5x5的核进行滤波。
2、sobel 求出梯度幅值,同时求出梯度方向(0°,45°,90°,135°)
3、非极大值抑制
4、滞后阀值处理
三 代码
本代码基于C 语言实现。因为最后要把算法移植到FPGA进行加速,所以主要用于实现和理解算法逻辑,并非最优代码
本算法模块,默认输入图像已经被高斯平滑过,所以省去高斯滤波这一块。
#include"include.h"
/*****************************************************************
void fpga_canny(cv::Mat src, cv::Mat dst, uchar sel,uchar maxVal,uchar minVal)
功能:
Canny 算法
参数:
cv::Mat srcImg
输入图像,已经过高斯处理
cv::Mat dstImg
输出图像
uchar sel
sobel 输出图像边缘 1=标准sobel,0=双边缘
uchar maxVal
最大阈值
uchar minVal
最小阈值
返回值:
无
****************************************************************/
void fpga_canny(cv::Mat src, cv::Mat dst, uchar sel, uchar maxVal, uchar minVal)
{
unsigned int rows = src.rows;
unsigned int cols = src.cols;
unsigned int x1, x2, y1, y2, Gout;
unsigned int x_abs, y_abs;
unsigned int x_abs_dir, y_abs_dir;
float tan_225 = 0.4142;
float tan_675 = 2.4142;
float tmp;
unsigned char theta; // 0 = 0 度,1 = 45度,2 = 90度,3 = 135度
unsigned char Gx_s;// Gx 符号 0= 正, 1= 负;
unsigned char Gy_s;// Gy 符号 0= 正, 1= 负;
unsigned char buff3x3[9];
unsigned char value;
//cv::Mat nonMaxImg = cv::Mat::zeros (src.rows, dst.cols, CV_16UC1);//存放 nonMax
cv::Mat nonMaxImg(src.rows, dst.cols, CV_16UC1);//存放 nonMax
cv::Mat sobelImg(src.rows, dst.cols, CV_16UC1);//存放 sobel
cv::Mat dirImg(src.rows, dst.cols, CV_8UC1);//存放梯度方向
cv::Mat sobelImg_show;
cv::Mat nonMaxImg_show;
// sobel 求梯度
for (unsigned int y = 2; y< rows -1; y++)
{
for (unsigned int x = 2; x < cols -1 ; x++)
{
x1 = src.at(y - 1, x - 1)
+ src.at(y, x - 1) * 2
+ src.at(y + 1, x - 1);
x2 = src.at(y - 1, x + 1)
+ src.at(y, x + 1) * 2
+ src.at(y + 1, x + 1);
y1 = src.at(y - 1, x - 1)
+ src.at(y - 1, x) * 2
+ src.at(y - 1, x + 1);
y2 = src.at(y + 1, x - 1)
+ src.at(y + 1, x) * 2
+ src.at(y + 1, x + 1);
if (x1 > x2)
{
if (sel)
{
x_abs = 0;
}
else
{
x_abs = x1 - x2;
}
Gx_s = 1;
x_abs_dir = x1 - x2;
}
else
{
x_abs = x2 - x1;
Gx_s = 0;
x_abs_dir = x2 - x1;
}
if (y1 > y2)
{
if (sel)
{
y_abs = 0;
}
else
{
y_abs = y1 - y2;
}
Gy_s = 1;
y_abs_dir = y1 - y2;
}
else
{
y_abs = y2 - y1;
Gy_s = 0;
y_abs_dir = y2 - y1;
}
Gout = x_abs + y_abs;
if (Gout > 255)
{
//Gout = 255;
}
sobelImg.at(y, x) = Gout;
// 求梯度方向
tmp = (float)y_abs_dir / (float)x_abs_dir;
if (tmp < tan_225)
{
theta = 0;
}
else if (tmp > tan_675)
{
theta = 2;
}
else
{
if (Gy_s == Gx_s)
{
theta = 1;
}
else
{
theta = 3;
}
}
dirImg.at(y, x) = theta;
}
}
sobelImg.convertTo(nonMaxImg_show, CV_8UC1);
cv::imshow("fpga_canny_sobel", sobelImg);
cv::imwrite("fpga_canny_sobel.bmp", sobelImg);
//非极大值抑制
for (unsigned int y = 2; y< rows -1; y++)
{
for (unsigned int x = 2; x < cols -1; x++)
{
theta = dirImg.at(y, x);
switch (theta)
{
case 0:
if ((sobelImg.at(y, x - 1) < sobelImg.at(y, x)) && (sobelImg.at(y, x) >= sobelImg.at(y, x + 1)))
{
nonMaxImg.at(y, x) = sobelImg.at(y, x);
}
else
{
nonMaxImg.at(y, x) = 0;
}
break;
case 3:
if ((sobelImg.at(y + 1, x - 1) < sobelImg.at(y, x)) && (sobelImg.at(y, x) > sobelImg.at(y - 1, x + 1)))
{
nonMaxImg.at(y, x) = sobelImg.at(y, x);
}
else
{
nonMaxImg.at(y, x) = 0;
}
break;
case 2:
if ((sobelImg.at(y - 1, x) < sobelImg.at(y, x)) && (sobelImg.at(y, x) >= sobelImg.at(y + 1, x)))
{
nonMaxImg.at(y, x) = sobelImg.at(y, x);
}
else
{
nonMaxImg.at(y, x) = 0;
}
break;
case 1:
if ((sobelImg.at(y - 1, x - 1) < sobelImg.at(y, x)) && (sobelImg.at(y, x) > sobelImg.at(y + 1, x + 1)))
{
nonMaxImg.at(y, x) = sobelImg.at(y, x);
}
else
{
nonMaxImg.at(y, x) = 0;
}
break;
}
}
}
//unsigned int dis_y,dis_x;
//dis_y = 216;
//dis_x = 398;
//printf("-----------src------------\r\n");
//printf("%x,%x %x \r\n", src.at(dis_y - 1, dis_x - 1), src.at(dis_y - 1, dis_x), src.at(dis_y - 1, dis_x + 1));
//printf("%x,%x %x \r\n", src.at(dis_y, dis_x - 1), src.at(dis_y, dis_x), src.at(dis_y, dis_x + 1));
//printf("%x,%x %x \r\n", src.at(dis_y + 1, dis_x - 1), src.at(dis_y + 1, dis_x), src.at(dis_y + 1, dis_x + 1));
//printf("-----------sobelImg------------\r\n");
//printf("%x,%x %x \r\n", sobelImg.at(dis_y - 1, dis_x - 1), sobelImg.at(dis_y - 1, dis_x), sobelImg.at(dis_y - 1, dis_x + 1));
//printf("%x,%x %x \r\n", sobelImg.at(dis_y , dis_x - 1), sobelImg.at(dis_y , dis_x), sobelImg.at(dis_y , dis_x + 1));
//printf("%x,%x %x \r\n", sobelImg.at(dis_y + 1, dis_x - 1), sobelImg.at(dis_y + 1, dis_x), sobelImg.at(dis_y + 1, dis_x + 1));
//
//printf("-----------dirImg------------\r\n");
//printf("%x,%x %x \r\n", dirImg.at(dis_y - 1, dis_x - 1), dirImg.at(dis_y - 1, dis_x), dirImg.at(dis_y - 1, dis_x + 1));
//printf("%x,%x %x \r\n", dirImg.at(dis_y, dis_x - 1), dirImg.at(dis_y, dis_x), dirImg.at(dis_y, dis_x + 1));
//printf("%x,%x %x \r\n", dirImg.at(dis_y + 1, dis_x - 1), dirImg.at(dis_y + 1, dis_x), dirImg.at(dis_y + 1, dis_x + 1));
//printf("-----------nonMaxImg------------\r\n");
//printf("%x,%x %x \r\n", nonMaxImg.at(dis_y - 1, dis_x - 1), nonMaxImg.at(dis_y - 1, dis_x), nonMaxImg.at(dis_y - 1, dis_x + 1));
//printf("%x,%x %x \r\n", nonMaxImg.at(dis_y , dis_x - 1), nonMaxImg.at(dis_y , dis_x), nonMaxImg.at(dis_y , dis_x + 1));
//printf("%x,%x %x \r\n", nonMaxImg.at(dis_y + 1, dis_x - 1), nonMaxImg.at(dis_y + 1, dis_x), nonMaxImg.at(dis_y + 1, dis_x + 1));
nonMaxImg.convertTo(nonMaxImg_show, CV_8UC1);
cv::imshow("nonMaxImg", nonMaxImg_show);
cv::imwrite("fpga_canny_nonMaxImg.bmp", nonMaxImg_show);
//边缘标记, 这里最优的办法应该用栈的操作来实现。这里只是为了便于理解
cv::Mat flgImg(src.rows, src.cols, CV_8UC1);//存放标记 0=不是是边缘,1=可能是边缘,2=是边缘
uchar *stack[65536];// 存放 边缘点的地址
uchar **p_stack_top;
uchar **p_stack_bottom;
unsigned short *p_nonMax;//指向非极大值处理后的图像
uchar *p_flgImg;
memset(&stack[0], 0,sizeof(stack));
p_stack_top = &stack[0];
p_stack_bottom = &stack[0];
p_nonMax = (unsigned short*)nonMaxImg.data;
p_flgImg = flgImg.data ;
for (unsigned int y = 2; y< rows - 1; y++)
{
for (unsigned int x = 2; x < cols - 1; x++)
{
if (*(p_nonMax + y*cols + x) <= minVal) // 当前像素小于极大值
{
*(p_flgImg + y*cols + x) = 0; // 不是边缘点
}
else if (*(p_nonMax + y*cols + x) > maxVal // 当前像素大于极大值
&& (*(p_nonMax + (y - 1)*cols + x) <= maxVal) //上一个像素不是边缘点
&& (*(p_nonMax + y*cols + x -1) <= maxVal) // 前一个像素不是边缘点
)
{
*(p_flgImg + y*cols + x) = 2; // 标记为边缘点(起点)
*p_stack_top = (p_flgImg + y*cols + x);
p_stack_top++;
}
else
{
*(p_flgImg + y*cols + x) = 1; // 可能是边缘点
}
}
}
cv::imshow("flgImg", flgImg);
更新标记,对可能是边缘的点进行处理(边缘追踪)
uchar *p_tmp;
while (p_stack_top - p_stack_bottom)
{
p_stack_top--;
p_tmp = *p_stack_top;
if (*(p_tmp - cols - 1) == 1)
{
*p_stack_top = p_tmp - cols - 1;
*(p_tmp - cols - 1) = 2;
p_stack_top++;
}
if (*(p_tmp - cols) == 1)
{
*p_stack_top = p_tmp - cols ;
*(p_tmp - cols) = 2;
p_stack_top++;
}
if (*(p_tmp - cols + 1) == 1)
{
*p_stack_top = p_tmp - cols + 1;
*(p_tmp - cols + 1) = 2;
p_stack_top++;
}
if (*(p_tmp - 1) == 1)
{
*p_stack_top = p_tmp - 1;
*(p_tmp - 1) = 2;
p_stack_top++;
}
if (*(p_tmp + 1) == 1)
{
*p_stack_top = p_tmp + 1;
*(p_tmp + 1 ) = 2;
p_stack_top++;
}
if (*(p_tmp + cols - 1) == 1)
{
*p_stack_top = p_tmp + cols - 1;
*(p_tmp + cols - 1) = 2;
p_stack_top++;
}
if (*(p_tmp + cols) == 1)
{
*p_stack_top = p_tmp + cols ;
*(p_tmp + cols) = 2;
p_stack_top++;
}
if (*(p_tmp + cols + 1) == 1)
{
*p_stack_top = p_tmp + cols + 1;
*(p_tmp + cols + 1) = 2;
p_stack_top++;
}
}
生成边缘图像
uchar *p_dstImg;
p_dstImg = dst.data;
for (unsigned int y = 2; y< rows - 1; y++)
{
for (unsigned int x = 2; x < cols - 1; x++)
{
if (*(p_flgImg + y*cols + x) == 2)
{
*(p_dstImg + y*cols + x) = 255;
}
else
{
*(p_dstImg + y*cols + x) = 0;
}
}
}
cv::imshow("fpga_canny_Dst", dst);
cv::imwrite("fpga_canny_Dst.bmp", dst);
}  640x480原图
640x480原图
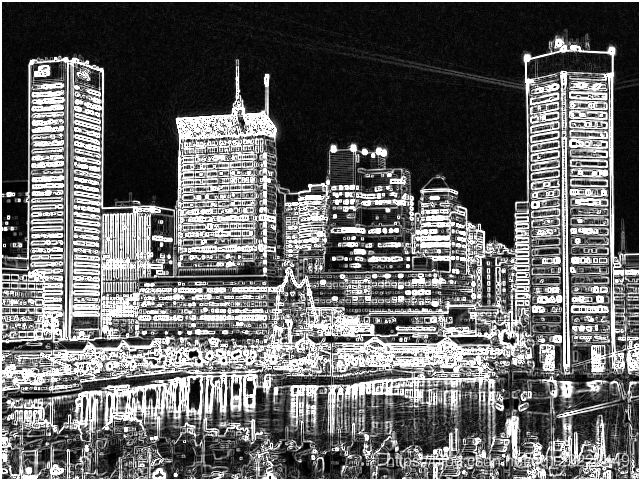 640x480 sobel 图像
640x480 sobel 图像
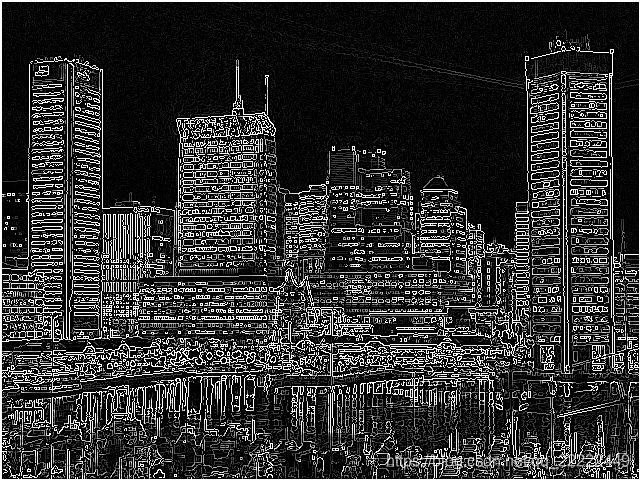 640x480 非极大值抑制图
640x480 非极大值抑制图
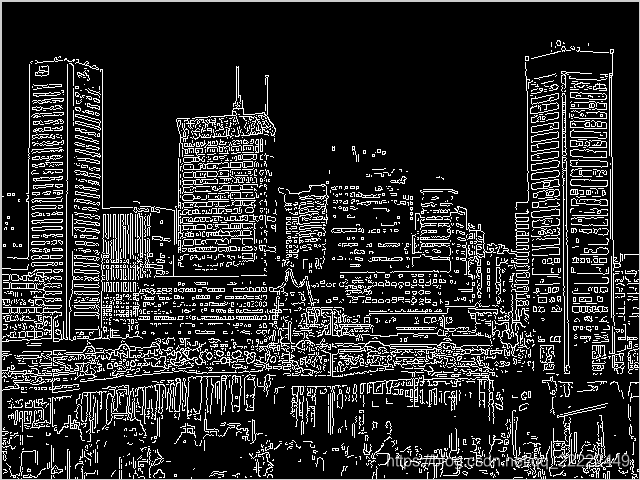 生成的 640x480 Canny 图
生成的 640x480 Canny 图
 Opencv 的canny 图
Opencv 的canny 图
因能力所限,难免有理解不到位之处,欢迎大家批评指正
更多分享,请关注微信公众号:FPGA历险记
