直立车想节能——2020全国大学生智能车车竞赛经验记录之梦的开始
如今回首,我不懂我一个通信工程的为什么要去做这个比赛哈哈哈,当时我是队友中兴趣最浓烈的,虽然结果一般,但是我真的觉得很有收获学到了很多,也不后悔!那么从这也算是梦的开始,不过到最后大梦一场,终究黄粱一梦。那么,冲冲冲!
我们学校也算是实验室氛围比较浓厚,我是大一就参加了电赛的电源类,另外俩个队友一个是电源类,一个是测控类,所以我们一开始在四轮,节能,信标中就选中了无线充电的俩轮直立车这一点。
一是我以前做过无线充电,二是我队友一直在调平衡车,对于平衡车的理解比较深刻,说干就干!
结果emmm,就疫情了,直接裂开

这一待就是在家里待了半年,这期间关于比赛的很多细则也渐渐的出来了,然后我又裂开了,居然是stc的单片机,这不是51么,虽然人家是什么stc8,但是本质还是个51,还是什么8h 和8g甚至还没量产,感情我这是bug测试员???心态崩了呀!结果到最后我们选用了性能更低的一个8a,哈哈,真的很神奇。
其实在这里的时候我就应该意识到一个问题,节能从来就不是竞速组,从低性能的主控就可见一斑
然后时间就到了6月份,疫情也好的差不多了,比赛时间也基本上确定了,我来到成都和朋友们一起租房子开始准备。
首先是所有的设计部分,节能的核心思想是无线充电加上电容组作为电池供电,这就面临两个问题,如何无线充电和如何从电容组中取电
车模选择
车模选择上,我们踩了很大的一个坑,这里详细说一下。
由于规则允许自制车模,所以我们一开始采用的是全部自制,我买了很多种减速电机,包括N20这种又轻又小的,但是都是被我否定了,因为较轻的电机要么力矩大,要么转速快力矩小。最后我们选择了5w的空心杯,个人认为这种电机勉强够使用,但是你要制作比较好的减速比,空心杯普遍转速较快力矩较小,只有增加减速比才能增加力矩,个人测试了2.2的减速比是不够的,个人认为减速比得到4-5的样子可能才勉强够用,还不一定能上坡道。最后由于时间问题我们才使用d车车模直接使用了,浪费了这么多的时间摸索电机,也是我们失败的一个主要原因。(380还是香呀!)
经历了这么多,个人认为,节能的最佳方案应该是以自制车模为主,380的电机为辅,这样做的的车模应该是比较优秀的,而且重量是十分轻的。
结构设计
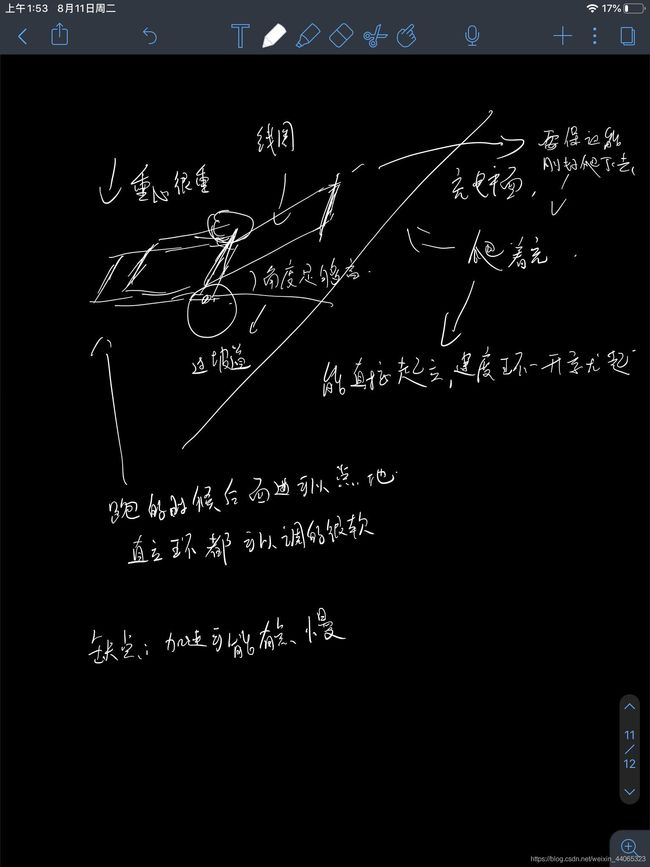
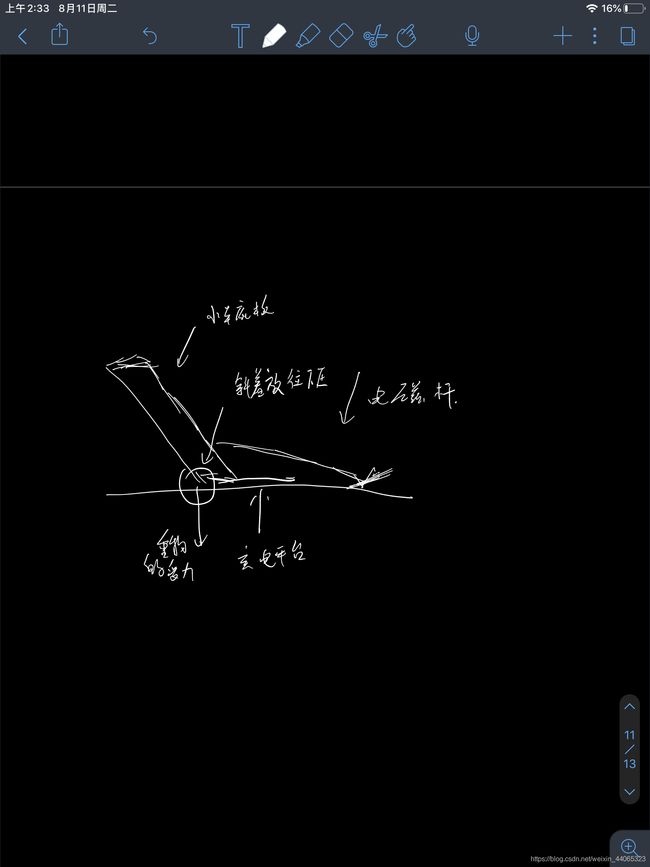
这张图是我个人在踩了很多坑之后认为的一个比较好的结构方案
以D车车模为例,我们的底板可以选择是3D打印或者直接是自己的pcb板材作为我们的小车底板,我们的重心需要集中在大概的车轮的斜后方(以电磁杆为前),这样方便我们的起立的同时能更大程度的方便我们进行加速。我们的充电线圈放在电磁杆上,我们让电磁杆趴在地上充电,这样在起立的时候直接开启直立环就可以开跑。这样就要保证电磁杆趴在地上的时候你能刚刚好趴在地上,可以适当增长电磁杆来获得更远的前瞻以及增加力矩。
同时我个人认为可以将整个车模的v型弄成钝角的v,这样对于我们的直立环也很好调。而这就面临着车在高速时候前瞻可能会撞上坡道,所以我们可以选择在一定程度上在地板上架起一定的高度作为的我们前瞻的电磁杆最低点,防止撞上坡道。
电源设计
无线充电
近些年来无线充电越来越火热,无线充电手机,无线充电鼠标等等。其实无线充电的核心原理就是利用线圈的一个谐振特性,其实大家高中物理都学过,电到磁,磁到电的这么一个过程,由于线圈通电会产生磁场所以在次级线圈会生成电,但是这个效率十分的低下,由此我们知道一点,就是线圈在谐振条件下,传播的效率非常高,而我们想要高效充电进去,就得让线圈谐振,而谐振就得配谐振电容。
其实从十三届开始我们就会发现,无线充电用的是640khz的高频谐振,对于这种我们的谐振电容就得使用NPO电容(搜的话说是温漂比较小,也好像是高频电容),所以在这里由于节约时间我们队友使用的方案就是龙邱的建达盒子外形为基础,我们3D打印的外壳作为我们的线圈,然后采用全波整流,使其输出直流电压。
在接受端我们使用的是超级电容电源管理芯片,使整流出来的电压能直接能给电容组充电,当然电容组我们是需要保护板的,这些就不详细介绍了。
主电源提供
在主板上,我们使用了TPS61088作为主升压,从电容组中取电,大家可以看到这款芯片的介绍
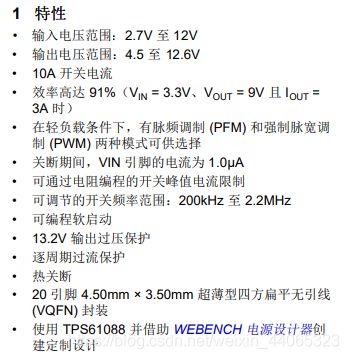
由于他的最低电压输入很低,所以当电容组只有2.7V的时候我们甚至还能取到电供使用,十分优秀。(个人使用发现,在电容组大概只有2.9左右的电压时,升压出的负载调整率很低,也就是虚电)
我们使用它升压到12V来给我们的很多芯片供电和主电路的供电。
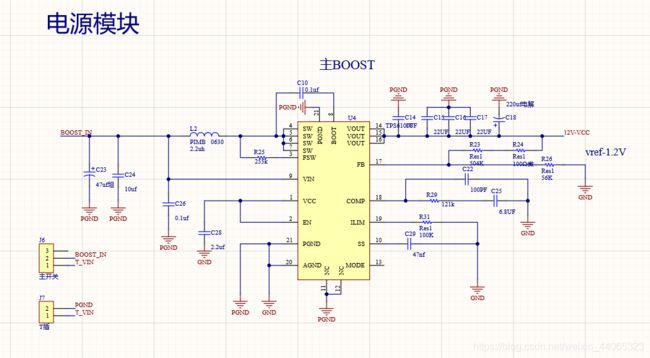
PS:我们可以使用TI提供的WEBENCH来帮助我们进行芯片外围电路的设计
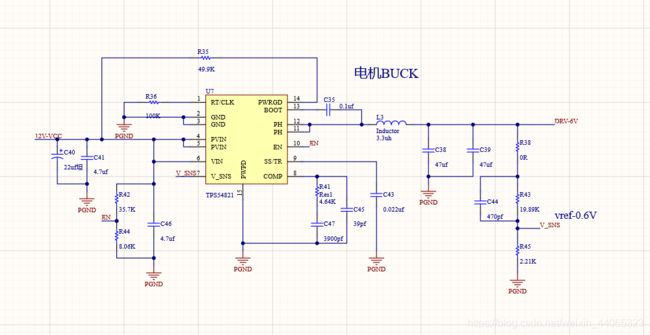
电机驱动供电以及主控和其他外设
接下来我们分别需要一个降压给我们的主控供电和电机供电
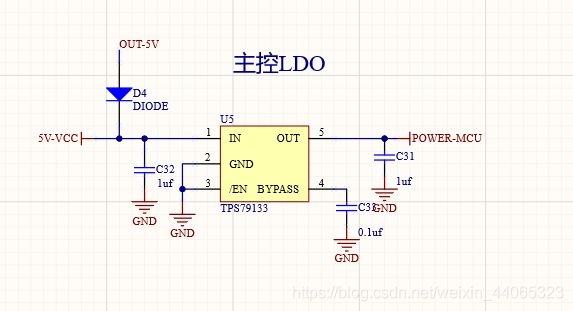
电机降压的buck我们使用的是TPS54821降到7.2v给我们的电机供电(图中的网络标号为错误)
和一个降压的LDO给我们的主控以及各种运放,传感器供电。
电容组
在电容组的设计上我们采用了5节2.7V 60F的超级电容串联使用,电容组串联能增加耐压值,减少容值。在电容组中会有电容保护电容,为了电容均流充电防止某个电容过冲。在个人测试中显示,我们并不需要这么大的电容容值,我们的车重量在900g左右(因为一开始的错误设计在后面赶时间就没空管质量等的问题)能在充电到8.5v左右的情况下跑100m左右。所以我们完全可以减少单个电容的容值来减少电容的体积和质量(电容的大小和耐压值和体积成正相关关系)来降低我们的车模质量。
为什么
电源部分
这大概就是我们的所有电源设计部分,可能有人要问了,你为什么要这么弄?
首先,节能宗旨就是轻,所以你在主要的电源设计上,不可能使用分立的元器件,一方面分立元件的效率很难提升,其次就是分立元件中的电感电容等等过重,集成芯片就成了我们的必然选择。
其次,我们需要从电容中取电,确保是需要有一个升压,你可以是一个boost升压,也可以是一个buck-boost升降压到指定的电压值。这俩个都有各自的优缺点,buck-boost这种升降压你能直接到自己想要的电压值,而不会受到电容组的电压变化而导致的不能升压(输入电压值大于输出)。可惜我们没有找到电流值符合我们要求的buck-boost芯片,所以我们的方案选择是,电容组限压冲到10.3v,而我们的升压只升到12v,再经过一个二次的降压和LDO分别供电来实现方案。
总结
稳定的硬件
没有硬件基础,软件就是一坨狗屎,我们在使用过程中烧了不少的东西,遇见了各种各样的问题,所以在硬件设计的开始 就要对所有的细节要考虑很清楚,要有多大的电流,多大的电压,需要走多粗的线等等。我们在比赛前俩天把板子烧了,从头开始弄,让自己心态大崩,很多事情也就没有做好了。
好的结构
七分结构三分代码,这是我队友和我说的,我一开始还不太相信,但是经历了这么多之后,发现我们搭的结构属实拉胯,一是重心太高了,二是太相信自己了。
节能非竞速组
继承上一点我说太相信自己了,可能也是我们过于自负了,一味追求速度,我们加高重心的原因就是相信自己能在直立这一点上调好(我们确实也做到了),高的重心能获得更大的加速度,可惜我们不需要那么大的速度,我们只需要跑完全程尽量完成所有元素,这才是最为重要的事情。
方向才是一切!
在正确的方向上面走一步都要比在错误的方向上走一万步要强,我们在一开始选取电机,车模,等等上浪费了大量的时间和金钱。尽管我们自认为很努力,但是得不到好的结果,这就是在错误的方向上停留太久的缘故。在尽可能的情况下,不要设立太高的目标,先实现功能再考虑优化,一步一个脚印才最为重要。
PS:软件部分在这里直立车想节能——2020全国大学生智能车车竞赛经验记录之我想要直立(平衡小车串级pid调参经验)