Gunnar-Farneback算法原理 & Farneback光流法在UCSD异常数据集上的Demo
Gunnar-Farneback算法
论文:Two-Frame Motion Estimation Based on Polynomial Expansion
会议:13th Scandinavian Conference on Image Analysis (SCIA 2003)
作者:Gunnar Farnebäck(Computer Vision Laboratory, Link¨oping University, SE-581 83 Link¨oping, Sweden)
备注:[email protected] http://www.isy.liu.se/cvl/
一、多项式展开
多项式展开的想法是把每个像素点的邻域都用多项式来表示:
![]() (1)
(1)
其中A是对称矩阵,b是向量,c是常量。系数是根据邻域内信号值的加权最小二乘法估计出来的。权重由两个组成部分,称为确定性和适用性。确定性与邻近区域的信号值耦合,而适用性则根据点在邻域中的位置确定邻域中点的相对权重。
二、位移估计
由于每个邻域都可以用一个多项式来逼近,所以首先分析一个多项式经过平移后会发生什么变化。考虑以下二次多项式:
![]() (2)
(2)
整体位移d个单位后得到信号 :
:
![]() (3)
(3)
设二次多项式等式如下:
![]() (4)
(4)
![]() (5)
(5)
![]() (6)
(6)
当 是非奇异矩阵时,可以解出
是非奇异矩阵时,可以解出 :
:
![]() (7)
(7)
![]() (8)
(8)
实际情况中,不存在整个信号表示为一个多项式以及这两个图像信号的全局平移,但上述公式(7)仍然适用于实际信号。
这里用局部多项式逼近方程(2)中的全局多项式。然后对两个图像做多项式展开,第一个图像对应系数为![]() ,
,![]() 和
和![]() ,第二个图像同理。理想情况下,根据方程(4)应该有
,第二个图像同理。理想情况下,根据方程(4)应该有![]() ,但实际上应该求解近似值:
,但实际上应该求解近似值:
![]() (9)
(9)
![]() (10)
(10)
然后用![]() 代替前面的全局变量:
代替前面的全局变量:
![]() (11)
(11)
下面开始解决邻域估计的问题。根据方程(11)可以对每个像素点进行运算,但考虑到庞大的运算量这样做显然不太现实。假设位移过程是缓慢进行的,那么应当尽可能的缩小 的邻域
的邻域 的搜索范围并找到符合方程(11)的
的搜索范围并找到符合方程(11)的![]() :
:
![]() (12)
(12)
这里设![]() 为像素点对应的权重函数,根据最小二乘法可得:
为像素点对应的权重函数,根据最小二乘法可得:
![]() (13)
(13)
三、参数化位移场
为了提高算法鲁棒性,对于一些运动模式应该建立参数化模型。下面来构建带有8个参数的2D运动模型:
![]() (15)
(15)
![]()
上式可以表示成:
![]() (16)
(16)
![]() (17)
(17)
![]() (18)
(18)
带入到方程(12)中,即可得到加权最小二乘问题:
![]() (19)
(19)
现在用 去索引像素点邻域中的坐标,用最小二乘法求解可以得出:
去索引像素点邻域中的坐标,用最小二乘法求解可以得出:
![]() (20)
(20)
这里可以像前面一样分别计算出![]() 和
和![]() ,然后用
,然后用 做加权平均求出位移
做加权平均求出位移![]() 。
。
四、利用先验信息
目前为止仍存在一个问题,就是两个信号在相同坐标下的局部多项式除了位移之外都是一致的。由于这里的多项式展开是局部模型,所以会随着在空间位移而发生变化,所以会引入(11)中的误差,且这个误差会随着位移的增大而增大。所以这里引入先验位移信息,即比较第一个信号在的多项展开式和第二个信号在![]() 的多项展开式,其中
的多项展开式,其中![]() 为先验位移四舍五入得出的整型值,这样就只需要计算出真实值和基于先验位移的预估值。
为先验位移四舍五入得出的整型值,这样就只需要计算出真实值和基于先验位移的预估值。
替代上面的(9)和(10)为:
![]() (21)
(21)
![]() (22)
(22)
其中,
![]() (23)
(23)
五、迭代与多尺度位移估计
在算法中采用先验位移场的优势在于可以闭合循环并迭代。具备一个好的先验估计意味着相对位移更小,这反过来又可以提高位移估计的精度。这里考虑两种不同的方法,迭代位移估计和多尺度位移估计。
在这两种方法中,迭代估计一步的位移,作为下一步的先验位移。第一步中的先验位移场通常被初始化为零,除非有明确的信息。在第一种方法中,在所有迭代中使用相同的多项式展开系数,并且只需要计算一次。这存在一个问题是,如果第一次迭代位移(相对于先验位移)过大,输出的位移就不能期望得到改善,迭代也就失去了意义。通过在较粗的尺度上进行分析,可以减少位移过大的问题。这意味着我们对多项式展开具有高适用性。其结果是,该估计算法可以处理较大的位移,但同时精度却降低了。
多尺度位移估计方法,从一个较粗的尺度开始,得到一个粗略但合理的位移估计,接着通过逐级细化尺度获得越来越精确的估计。这样的缺点是需要重新计算每个尺度的多项式展开系数,但是可以通过在尺度变换之间进行二次采样来降低此成本。
Farneback光流法在UCSD异常数据集上的Demo
实验环境:Win10 | Python 3.7.3 | OpenCV 4.1.0
实验代码:
def draw_flow(im, flow, step=16):
# 在间隔分开的像素采样点处绘制光流
h, w = im.shape[:2]
y, x = mgrid[step/2:h:step, step/2:w:step].reshape(2, -1).astype(int)
fx, fy = flow[y, x].T
# 创建线的终点
lines = vstack([x, y, x+fx, y+fy]).T.reshape(-1, 2, 2)
lines = int32(lines)
# 创建图像并绘制
vis = cv2.cvtColor(im, cv2.COLOR_GRAY2BGR)
for (x1, y1), (x2, y2) in lines:
cv2.line(vis, (x1, y1), (x2, y2), (0, 255, 0), 1)
cv2.circle(vis, (x1, y1), 1, (0, 255, 0), -1)
return vis
# 省略N行代码......
# 提取第一帧
first_rgbframe = cv2.imread(frame_path + frames[0], 1)
del frames[0]
prev_gray = cv2.cvtColor(first_rgbframe, cv2.COLOR_BGR2GRAY)
for frame_i in frames:
rgbframe = cv2.imread(frame_path + frame_i, 1)
gray = cv2.cvtColor(rgbframe, cv2.COLOR_BGR2GRAY)
# 计算流
flow = cv2.calcOpticalFlowFarneback(prev_gray, gray, None, 0.5, 3, 15, 3, 5, 1.2, 0)
prev_gray = gray
drawImg = draw_flow(gray, flow)
cv2.imwrite(frameFB_path + frame_i, drawImg)
# 画出流矢量
cv2.imshow('Optical flow', drawImg)
if cv2.waitKey(10) == 27:
break
time.sleep(0.1)实验结果:
UCSDped1\Test\Test014
UCSDped2\Test\Test005
上面分别是UCSD anomaly dataset中的两个Test片段,可以看到人群或者单车/车辆经过的地方,绿色点都会伴随联动。
附录:
数据集链接:UCSD Anomaly Detection Dataset
OpenCV - calcOpticalFlowFarneback() 参数解释:
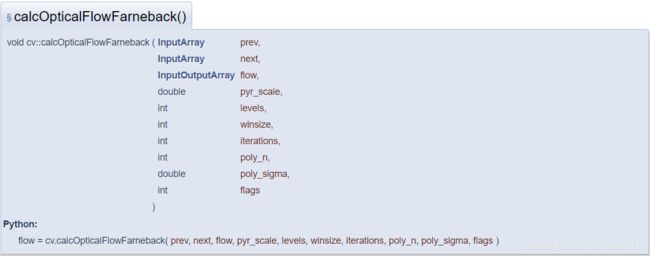
prev:前一张8位单通道输入图像
next:后一张8位单通道输入图像
flow:计算得出的与输入图像大小一致且类型为CV_32FC2的光流图
pyr_scale:构建金字塔时图像的缩放系数(<1);比如系数=0.5时是典型金字塔模型,没下一个层级图像为上一级的一半大小
levels:金字塔的层数;层数为1时表示没有额外的层级直接输入原图
winsize:平均窗口大小;窗口越大对于图像噪声越不敏感,能捕获到更多的快动作,但会产生更遗漏的动作场
iterations:每个金字塔层级中算法的迭代次数
poly_n:像素的邻域大小,邻域是为了做多项式展开的;邻域越大,表示图像越光滑,算法鲁棒性更强且运动场更模糊,标准参考值为5或者7
poly_sigma:用于平滑用作多项式展开基础的导数的高斯函数的标准差;poly_n=5时,可以设置poly_sigma为1.1;poly_n=7时,可以设置poly_sigma=1.5
flags:可以设置为以下两个标志之一
OPTFLOW_USE_INITIAL_FLOW:使用输入的光流图作为初始光流估计值
OPTFLOW_FARNEBACK_GAUSSIAN:使用高斯winsize×winsize滤波器代替相同大小的盒式滤波器进行光流估计;通常,此选项以较低的速度提供比盒式滤波器更精确的z流;通常,高斯窗口的winsize应设置为更大的值以达到相同的鲁棒性级别。
OpenCV官方原文解释:点击跳转到官方文档
参考资料:
1. Gunnar Farnebäck. Two-Frame Motion Estimation Based on Polynomial Expansion[C]// 13th Scandinavian Conference on Image Analysis (SCIA 2003). Springer-Verlag, 2003.
2. OpenCV官方文档